引言
空间机械臂是深入开展载人航天活动必不可少的工具, 它在空间站系统中承担着舱段捕获与转移、仪器设备转移与安装、辅助航天员作业等功能[1 ] . 末端执行器是空间机械臂系统的重要组成部分, 安装在机械臂的两端(腕、肩回转关节), 能够实现对合作目标的捕获、锁定、电气连接, 同时能完成对目标的解锁释放功能.
末端执行器对目标载荷的成功抓捕是空间机械臂完成舱外状态巡检、舱段转位、悬停飞行器捕获等任务的关键. 由于平面气浮台试验[2 ] 在约束和操作空间等方面都受到一定的限制, 因此为满足机械臂在轨工况全覆盖的验证要求, 需要对在轨任务进行一定的仿真模拟, 作为气浮式零重力地面二维物理试验和三维半物理试验[3 -4 ] 的必要补充.
柔性附件在航天器系统中有着广泛的应用[5 -7 ] , 得益于大捕获容差的特点[8 ] , 末端执行器的绳索式柔性捕获机构被广泛用于国际空间站等航天器的机械臂末端. 其理论分析和仿真研究也是近年来国内外学者关注的重点.
介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充.
随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] .
本文以空间机械臂末端执行器的柔性捕获机构为研究对象, 首先采用绝对节点坐标法建立了空间三维柔性捕获机构的动力学模型, 充分考虑柔性绳索的大变形特性和绳索与刚性目标之间的接触碰撞问题, 推导了软捕获过程的动力学模型. 然后建立了地面三维悬吊实验, 验证了模型的正确性, 最后, 将所建立模型与空间机械臂模型进行联合仿真, 对舱外状态巡检任务和漂浮目标捕获任务的软捕获阶段进行了仿真预测分析, 以期为后续研究和工程发展提供理论基础和相关参考.
1 捕获机构建模
1.1 工作原理
空间机械臂的在轨捕获过程分为3个阶段[10 ] :软捕获、拖动和锁定. 软捕获阶段又称为柔性预捕获, 通过柔性捕获机构在较大的捕获容差范围内将目标适配器上的捕获杆进行缠绕, 约束在较小的运动范围内; 拖动阶段通过内部电机运转拉近目标适配器与机械臂末端执行器的距离, 拉近过程中通过刚性导向机构进行容差校正, 实现目标适配器与末端执行器的完全对齐; 最终通过刚性锁定机构实现机械锁定和电信号连接. 其中, 软捕获阶段柔性捕获机构的成功操作是后续两阶段的先决条件, 并且是解决在轨控制精度带来的大捕获容差和导向机构刚性接触等挑战的关键.
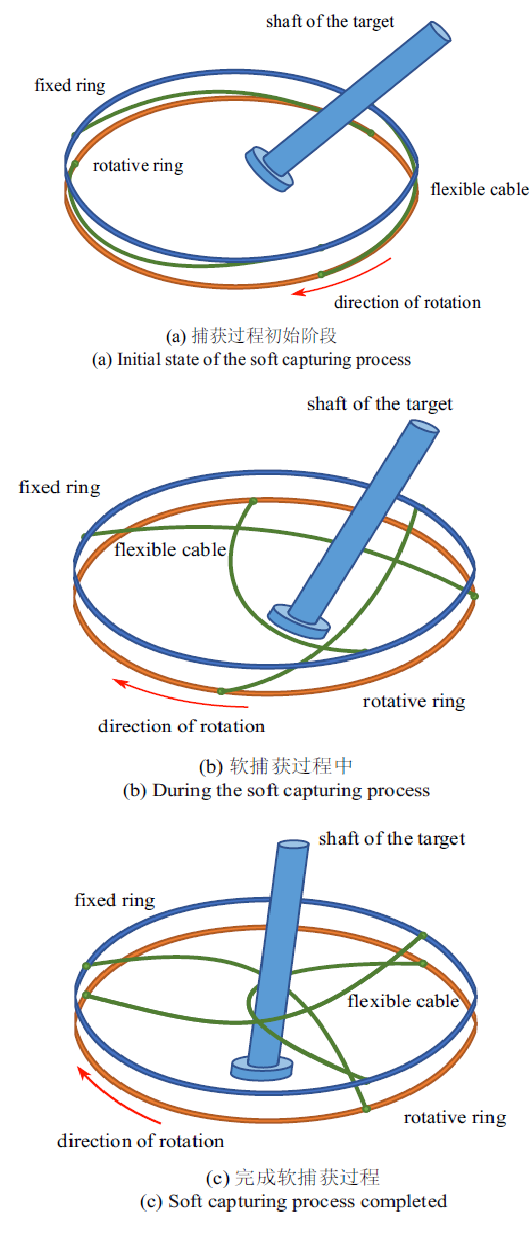
如图1 所示, 末端执行器柔性捕获机构由3根柔性钢丝绳索组成, 每根绳索两端分别与转动环和固定环连接, 呈3根空间等距螺旋线分布在末端执行器壳体内部.
图 1
图 1
软捕获过程示意图
Fig. 1
Illustration of the soft capturing process
固定环与转动环半径相等且圆心同轴, 顾名思义, 固定环与末端执行器壳体相对固定, 转动环由捕获电机通过减速机构驱动, 能绕其轴心转动.
初始状态下3根钢丝绳紧贴固定环和转动环内壁布置, 3根钢丝绳围绕的中间区域为捕获区域; 当目标适配器的捕获杆进入捕获区域后, 控制系统启动驱动组件, 驱动转动环绕其轴心转动, 进而牵引3根钢丝绳运动, 钢丝绳所围绕的中间区域逐步变小; 直至完成软捕获过程, 给出进一步执行信号.
1.2 柔性绳索建模
本节采用绝对节点坐标法的绳索单元[19 ] 对柔性绳索进行建模, 由于实际工程中绳索扭转变形影响较小, 该单元考虑了绳索的弯曲变形和拉伸变形, 忽略扭转弹性变形的影响.
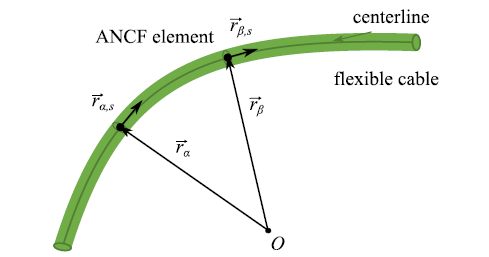
如图2 所示, 为一段柔性绳索, 定义单元上一编号为$k$的节点广义坐标为
(1) $ \begin{equation} \label{eq1} { e}_k =( r_k^{\rm T}, r_{k,s}^{\rm T})^{\rm T} \end{equation} $
图 2
图 2
绝对节点坐标法的绳索单元
Fig. 2
Cable element of ANCF
式中, ${ r}_k $表示节点$k$在全局参考坐标系下的位置坐标值, ${ r}_{k,s}=\partial { r}_k /\partial s$, $s$表示单元轴线方向的弧长坐标, 上标T表示转置.
于是, 以节点$\alpha $和$\beta $为两端点的任一单元$i$的广义坐标记为
(2) $ \begin{equation} \label{eq2} { q}_i^{\rm e} =( e_\alpha ^{\rm T},\ \ e_\beta ^{\rm T})^{\rm T} \end{equation}$
为便于书写, 下文中组集动力学方程内容之前暂时省略单元下标$i$. 该单元上任一点的广义坐标为
(3) $ \begin{equation} \label{eq3} \left.\begin{array}{l} { r}(s)={ S q}^{\rm e} \\ { r}_s (s)={ S}_s { q}^{\rm e} \\ \end{array} \right\} \end{equation}$
(4) $ \begin{equation} \label{eq4} { S}=({\begin{array}{cccc} {S_1 { I}_3 } \ \ \ \ & {S_1 { I}_3 } \ \ \ \ & {S_1 { I}_3 } \ \ \ \ & {S_1 { I}_3 } \ \ \\ \end{array} }) \end{equation}$
式中, ${ I}_3 $为$3\times 3$的单位阵, 定义单元长度为$l_{\rm e}$并在弧长方向上进行单位化, 即$\xi =s/l_{\rm e} $, 则有
(5) $ \begin{equation} \label{eq5} \left. {\begin{array}{l} S_1 =1-3\xi ^2+2\xi ^3 \\ S_2 =l_{\rm e} (\xi -2\xi ^2+\xi ^3) \\ S_3 =3\xi ^2-2\xi ^3 \\ S_4 =l_{\rm e} (\xi ^3-\xi ^2) \\ \end{array}} \right\} \end{equation}$
(6) $ \begin{equation} \label{eq6} { M}^{\rm e}=A\int_{\rm 0}^{l_{\rm e} } {\rho { S}^{\rm T}{ S}} {\rm d}s=Al_{\rm e} \int_{\rm 0}^{\rm 1} \rho { S}^{\rm T}{ S}{\rm d}\xi \end{equation}$
式中, $A$是绳索横截面的面积, $\rho $是材料的密度.
(7) $ \begin{equation} \label{eq7} \varepsilon =\dfrac{\mbox{1}}{\mbox{2}}({ r}_s ^{\rm T}{ r}_s -1) \end{equation}$
(8) $ \begin{equation} \label{eq8} \kappa =\dfrac{\vert { r}_s \times { r}_{ss} \vert }{\vert { r}_s \vert ^3} \end{equation}$
于是, 绳索单元整体的应变能表示为拉伸应变能$U^{\rm l}$和弯曲应变能$U^{\rm b}$之和的形式
(9) $ \begin{equation} \label{eq9} U=U^{\rm l}+U^{\rm b}=\dfrac{1}{2}\int_0^{l_{\rm e} } {(EA\varepsilon ^2+EI\kappa ^2){\rm d}x} \end{equation}$
式中, $E$是绳索材料的弹性模量, $I$为横截面的惯性矩. 进一步, 给出绳索单元的弹性拉伸变形力和弯曲变形力
(10) $ \begin{equation} \label{eq10} \left. {{\begin{array}{l} {{ Q}^{\rm l}=\left( {\dfrac{\partial U^{\rm l}}{\partial { q}^{\rm e}}} \right)^{\rm T}=EAl_{\rm e} \int_0^1 {\varepsilon \left( {\dfrac{\partial \varepsilon }{\partial { q}^{\rm e}}} \right)^{\rm T}{\rm d}\xi } } \\ {{ Q}^{\rm b}=\left( {\dfrac{\partial U^{\rm b}}{\partial { q}^{\rm e}}} \right)^{\rm T}=EIl_{\rm e} \int_0^1 {\kappa \left( {\dfrac{\partial \kappa }{\partial { q}^{\rm e}}} \right)^{\rm T}{\rm d}\xi } } \\ \end{array} }} \right\} \end{equation}$
1.3 构型与约束关系
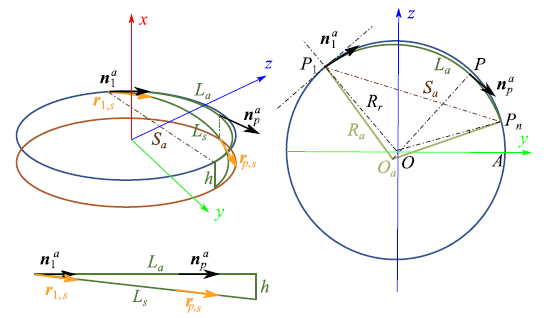
定义捕获坐标系如图3 所示, 其中$x$方向与末端执行器的朝向重合.
图 3
图 3
等距螺旋线构型
Fig. 3
Isometric helices configuration
因此, 初始构型下每根绳索在平面$yz$内的投影都是一段圆弧, 该圆弧的弧长和弦长分别为
(11) $ \begin{equation} \label{eq11} \left. {\begin{array}{l} L_a =\sqrt {L_s^2 -h^2} \\ S_a =\sqrt 3 R_r \\ \end{array}} \right\} \end{equation}$
式中, $h$为两端点在$x$方向的距离, $L_s $为单根绳索的长度, $R_r $是固定环和转动环的半径.
(12) $ \begin{equation} \label{eq12} \left. {\begin{array}{l} R_a \alpha _a =L_a \\ R_a \sin \left( {\dfrac{\alpha _a }{2}} \right)=\dfrac{S_a }{2} \\ \end{array}} \right\} \end{equation}$
该非线性方程可以采用牛顿迭代法求数值解. 如图3 所示, $\angle O_a PO=\delta \alpha =\pi /3-\alpha _a /2$, 则$O_a $点的坐标为
(13) $ \begin{equation} \label{eq13} { r}_c =\left( {{\begin{array}{c} 0 \\ {R_r \cos \alpha _0 -R_a \cos (\alpha _0 -\delta \alpha )} \\ {R_r \sin \alpha _0 -R_a \sin (\alpha _0 -\delta \alpha )} \\ \end{array} }} \right) \end{equation}$
式中, $\alpha _0 $为绳索初始点连线与$Y$轴的夹角, 对于3根绳索, 分别为$2\pi /3$, 0和$-2\pi /3$. 于是, 绳上任一点$P$的位置为
(14) $ \begin{equation} \label{eq14} { r}_p ={ r}_c +\left( {{\begin{array}{c} {-\alpha _p h/\alpha _a }\\ {R_a \cos (\alpha _0 -\alpha _p )}\\ {R_a \sin (\alpha _0 -\alpha _p )}\\ \end{array} }} \right) \end{equation}$
式中, $\alpha _p $为$\angle POP_1 $的值, 该点的单位切向量值为
(15) $ \begin{equation} \label{eq15} { r}_{p,s} =\dfrac{1}{L_s }\left( {{\begin{array}{c} {-h}\\ {L_a \sin (\alpha _0 -\alpha _p )} \\ {-L_a \cos (\alpha _0 -\alpha _p )}\\ \end{array} }} \right) \end{equation}$
从而初始构型下绳索上任一点的广义坐标可以上式确定.
绳索两端分别与固定环和转动环由球铰连接, 限制端点处三方向相对位移, 于是绳索两端约束方程为
(16) $ \begin{equation} \label{eq16} { C}=\left( {{\begin{array}{c} {{ r}_0 (t)-{ r}_0 } \\ {{ r}_n (t)-{ r}_c -{ r}_c^n }\\ \end{array} }} \right)={\bf 0} \end{equation}$
式中, ${ r}_0 (t)$与${ r}_n (t)$分别为绳索两端位置坐标, ${ r}_0(t)$与固定环上${ r}_0 $处相连. 圆心$O_a $到末端点的矢量的坐标阵为
(17) $ \begin{equation} \label{eq17} { r}_c^n =\left( {{\begin{array}{c} {-h}\\ {R_a \cos [\alpha _0 -\alpha _a -\alpha (t)]}\\ {R_a \cos (\alpha _0 -\alpha _a -\alpha (t))}\\ \end{array} }} \right) \end{equation}$
式中, $\alpha (t)$为转动环的旋转角度, 对于恒定角速度$\omega $的转动, $\alpha (t)=\omega t$.
1.4 接触动力学分析
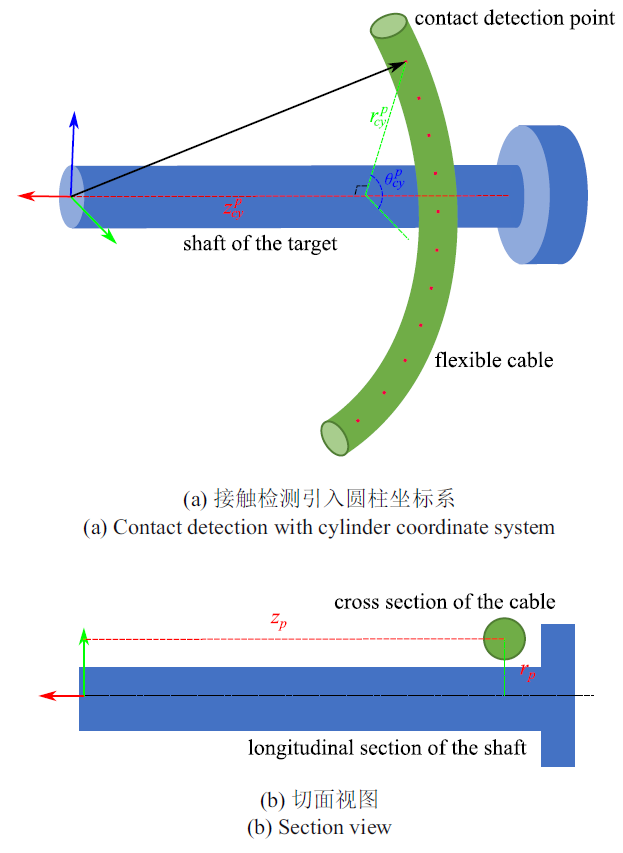
如图4 所示, 在每个单元设置多个接触检测点, 任一点$P$的坐标投影到目标适配器坐标系下, 可以写作
(18) $ \begin{equation} \label{eq18} \left( {{\begin{array}{*{20}c} {x_{\rm Tar}^P }\\ {y_{\rm Tar}^P }\\ {z_{\rm Tar}^P }\\ \end{array} }} \right)={ r}_{\rm Tar}^P ={ A}_{{\rm Tar}}^{\rm T} { A}_{\rm E} { S}(\xi ^P){ q}^{\rm e} \end{equation}$
图 4
图 4
接触检测示意图
Fig. 4
Contact detection
式中, ${ A}_{\rm Tar} $为目标适配器相对于全局坐标系的方向余弦阵, ${ A}_{\rm E}$为末端执行器相对于全局坐标系的方向余弦阵, $\xi ^P$为$P$点归一化后的弧长坐标.
为便于分析, 以目标适配器捕获杆中心轴为轴线, 引入一圆柱坐标系如图4 (a)所示, 其原点建立在目标适配器坐标系原点, 于是$P$点的坐标值$z_{cy}^P =-x_{\rm Tar}^P $和$r_{cy}^P =\sqrt {(y_{\rm Tar}^P )^2+(z_{\rm Tar}^P )^2} $可以用于接触检测, 于是接触检测问题转化成了图4 (b)所示的一平面问题. 此时根据绳索截面圆形与捕获杆剖面的矩形组合体之间接触检测可以判断接触与否以及接触深度.
接触力计算采用赫兹接触碰撞模型[33 ] , 由于捕获杆表面光滑度较高, 摩擦影响较小, 因此采用简单的库伦摩擦模型计算摩擦力
(19) $ \begin{equation} \label{eq19} \left. {\begin{array}{l} F_c =\dfrac{4}{3}E^\ast (R^\ast )^{1/2}\delta ^{3/2}+C\dot{{\delta }} \\ F_f =-{\rm sign}(v_t )\mu F_c \\ \end{array}} \right\} \end{equation}$
式中, $E^{\rm \ast }$为材料接触的等效弹性模量, $R^{\rm \ast}$为等效接触半径, $\delta $为接触嵌入深度, $C$为接触阻尼系数, $v_t $为接触点的切向相对速度, $\mu $为库伦摩擦系数.
(20) $ \begin{equation} \label{eq20} Q^{\rm c} ={ S}^{\rm T}(F_c { n}+F_f { \tau }) \end{equation} $
式中, ${ n}$和${ \tau }$分别为接触法向与切向单位矢量.
1.5 动力学方程组集
系统中第$i$个单元坐标${ q}_i^{\rm e} $与系统广义坐标${ q}$的关系可写作
(21) $ \begin{equation} \label{eq21} { q}_i^{\rm e} ={ B}_i { q} \end{equation} $
对于矩阵${ B}_i $, 仅在其第$i_{\rm e} $列到$i_{\rm e}+{12}$列的位置处取值为$12\times 12$的单位阵, 其余位置元素均为0, 其中$i_{\rm e} $为当前单元坐标在系统广义坐标中的起始位置.
(22) $ \begin{equation} \label{eq22} \left. {\begin{array}{l} { M\ddot{{ q}}}+{ C}_q^{\rm T} { \lambda}={ Q} \\ { C}={\bf 0} \\ \end{array}} \right\} \end{equation}$
式中, ${ M}=\sum\limits_{i=0}^{n_{\rm e} } {{ B}_i^{\rm T} { M}_i^{\rm e} { B}_i } $为系统的广义质量阵, $n_{\rm e} $为单元总个数, ${\ddot{{ q}}}$为系统广义坐标的两阶导数, ${ C}_q$为系统约束方程对广义坐标的雅可比矩阵, 可由式(16)对广义坐标求偏导得出, ${ \lambda}$是拉格朗日乘子列阵. 系统广义力阵包含系统的变形力和可能发生的接触力,即
(23) $ \begin{equation} \label{eq23} { Q}=\sum\limits_{i=0}^{n_{\rm e} } {{ B}_i^{\rm T} { Q}_i^{\rm e} } =\sum\limits_{i=0}^{n_{\rm e} } {{ B}_i^{\rm T} ({ Q}_i^{\rm l} +{ Q}_i^{\rm b} +{ Q}_i^{\rm c} )} \end{equation}$
采用数值积分方法对式(22)求解, 可得系统的动力学信息.
2 实验对照
2.1 实验方案
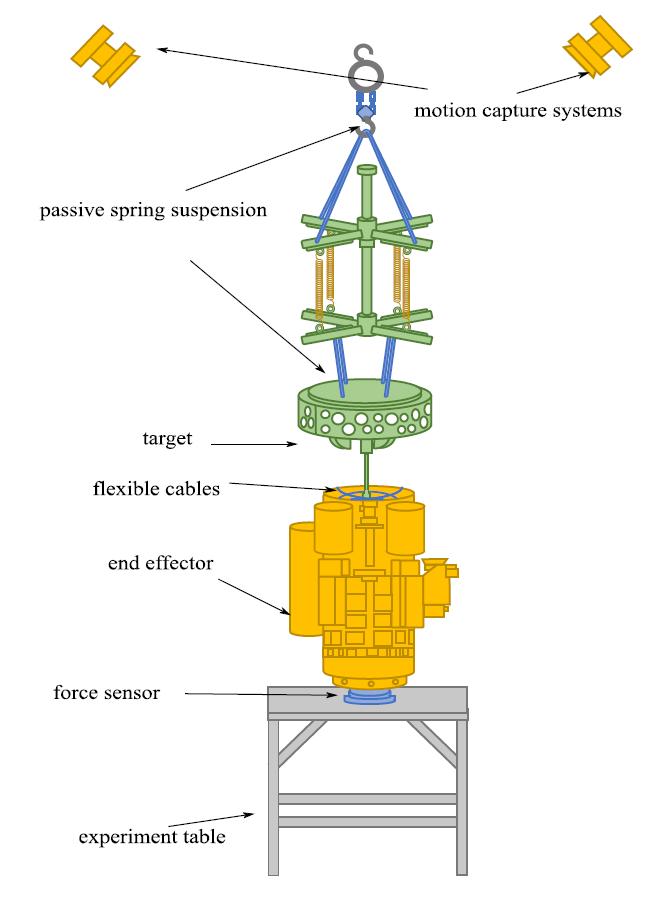
常规的气浮实验只能采集平面二维信息, 于是考虑其他方案来进行地面验证. 实际在轨抓捕过程中, 机械臂关节为被动柔顺状态, 整个过程除末端执行器外无其它主动输入. 为排除实验过程中主动系统对末端运动的干扰, 采用被动弹簧悬吊的方式进行验证. 实验场景如图5 所示.
图 5
图 5
实验方案
Fig. 5
Experiment scheme
实验过程中力传感器布置于末端执行器根部与实验台连接处, 用于采集软捕获过程中的力信号, 目标适配器由弹簧悬吊系统悬挂, 人为设置初始捕获误差. 四周为运动捕捉系统, 用于采集捕获过程中的运动信息.
同时建立与实验方案等效的地面悬吊仿真模型, 弹簧刚度采用测量值2042.5 N/m, 柔性绳索弹性模量20 GPa, 密度7800 kg/m$^{3}$, 每根绳索取10个绝对节点坐标绳索单元来模拟. 初始位置误差设置为$x=0.236 9$ m, $y=0.074 7$ m, $z=0.040 2$ m; 初始姿态表示为欧拉四元数[34 ] 的形式, 为$[0.999 3, 0.034 5, -0.007 5, -0.010 8]$. 仿真过程中采用HHT-$\alpha$方法[35 ] 进行数值积分, 步长$1.0\times10^{-5}$ s. 软捕获过程转动环角速度为8($^\circ$)/s, 全程转动80$^\circ$, 软捕获过程持续10 s.
2.2 实验结果及对比分析
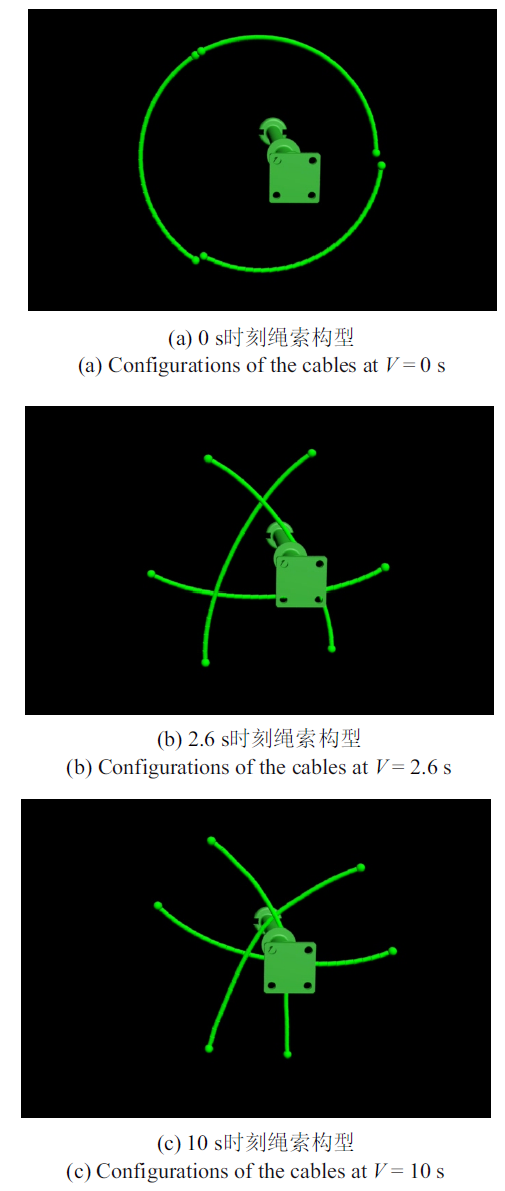
图6 为软捕获过程中的仿真画面, 分别给出了初始时刻、接触时刻以及软捕获结束时刻的截图. 为便于观察, 目标适配器仅保留了捕获杆可见, 末端执行器仅保留了3根绳索和端部球铰可见. 其中, 2.6 s时刻捕获杆初次与钢丝绳发生接触, 10 s时刻钢丝绳收拢到最小范围.
图 6
图 6
仿真0 s, 2.6 s 和10 s时刻绳索构型
Fig. 6
Configurations of the three cables at $t=0$ s, 2.6 s and 10 s of the simulation
实验结果数据通过坐标变换后转化到末端执行器坐标系下, 图7 为实验结果数据与仿真结果的对比. 可以看出, 仿真结果运动趋势和受力幅值范围基本吻合.
图 7
图 7
目标位移和受力仿真与实验对比
Fig. 7
Comparison of forces act on the target
从曲线可以看出, 2.6 s时刻绳索开始与捕获杆发生接触, 随着转动环转动, 捕获绳索中间围成的区域不断变小, 最终收缩至接近中心位置, 完成对目标的软捕获, 此时目标两径向位移都在1 cm范围内, 已经达到刚性对接机构能够顺利完成后续捕获阶段的范围内.
仿真结果与实验结果三方向位移误差取绝对值后求平均值分别为$x$方向0.27 mm, $y$方向2.68 mm和$z$方向5.99 mm. 三方向受力绝对平均误差分别为$x$方向0.99 N, $y$方向1.48 N和$z$方向2.12 N. 仿真结果误差主要来源于测量误差和建模误差, 其中, 运动捕捉系统和力传感器都存在一定的测量误差, 同时运动信息的误差在坐标系转换过程中会对力信息误差产生一定影响. 另一方面, 由于仿真模型中对悬吊装置进行了简化, 未考虑悬吊点的间隙和附加绳索电缆等不确定性因素, 因此仿真模型边界条件存在一定误差.
3 任务仿真应用
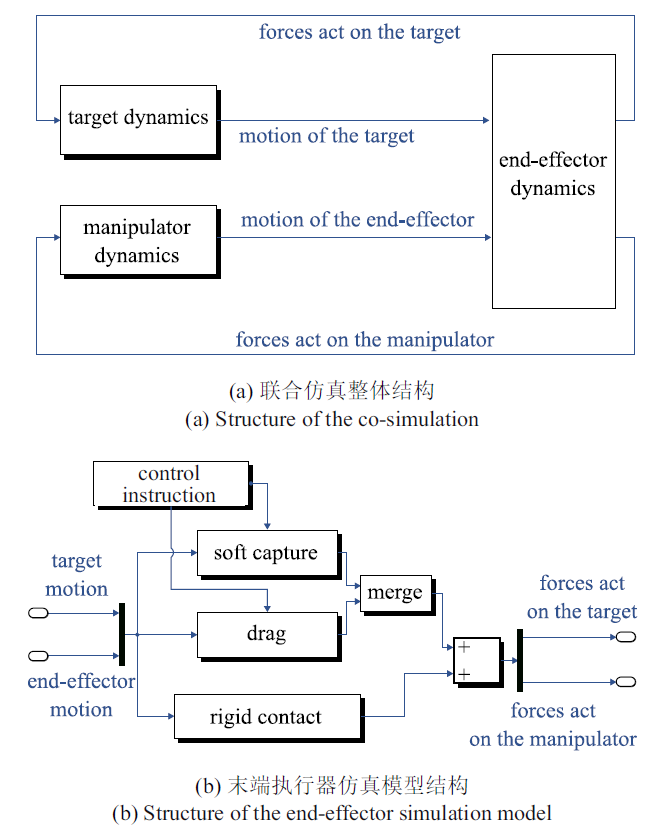
结合上述模型, 对常见在轨任务进行了联合仿真分析, 图8 为联合仿真结构框架, 其中柔性捕获机构动力学模型、拖动传动机构、刚性对接机构接触动力学模型和控制程序联合组成末端执行器动力学模型, 该模型与空间机械臂模型[36 ] 、被捕获目标模型组成任务仿真系统. 根据空间机械臂的主要任务设计方案, 本文选取了舱外状态巡检(工况1)和悬停飞行器捕获(工况2)两种典型任务[37 ] 下的软捕获动力学仿真过程进行分析.
图 8
图 8
联合仿真示意图
Fig. 8
Diagram of the co-simulation
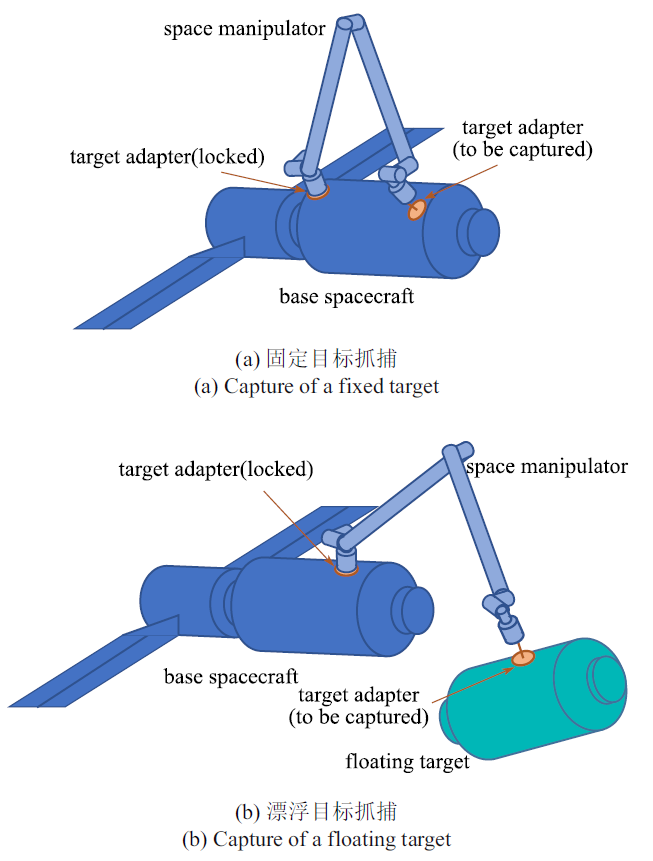
如图9 所示, 舱外状态巡检任务(工况1)中, 机械臂肩部末端执行器与漂浮基座相连, 通过刚性锁定机构固定在基座上, 腕部末端执行器捕获固定在同一基座上另一位置的目标适配器, 通过机械臂两端的末端执行器交替抓捕锁定-释放多个布置于基座航天器表面不同位置的目标适配器, 实现舱外巡检任务. 该过程中目标适配器与基座固定在一起, 因此可以以漂浮基座为参考坐标系, 将问题等效为固定目标的抓取操作. 而悬停飞行器捕获任务(工况2)中, 目标与基座各自漂浮, 存在相对运动.
图 9
图 9
在轨操作中两种典型任务
Fig. 9
Two representative on-orbit operations
抓捕过程中, 为避免末端捕获电机的主动控制与关节控制电机输出的力矩互相影响, 空间机械臂关节切换为被动柔顺模式, 各关节电机停控并释放关节主动力矩, 此时各关节仅受关节摩擦与传动机构所产生的被动力矩作用. 为便于集中分析末端执行器软捕获阶段的动力学行为, 本仿真省略掉机械臂移动过程中的轨迹规划和执行阶段, 从末端到位且关节电机停控时刻开始至单次软捕获操作完成时刻终止.
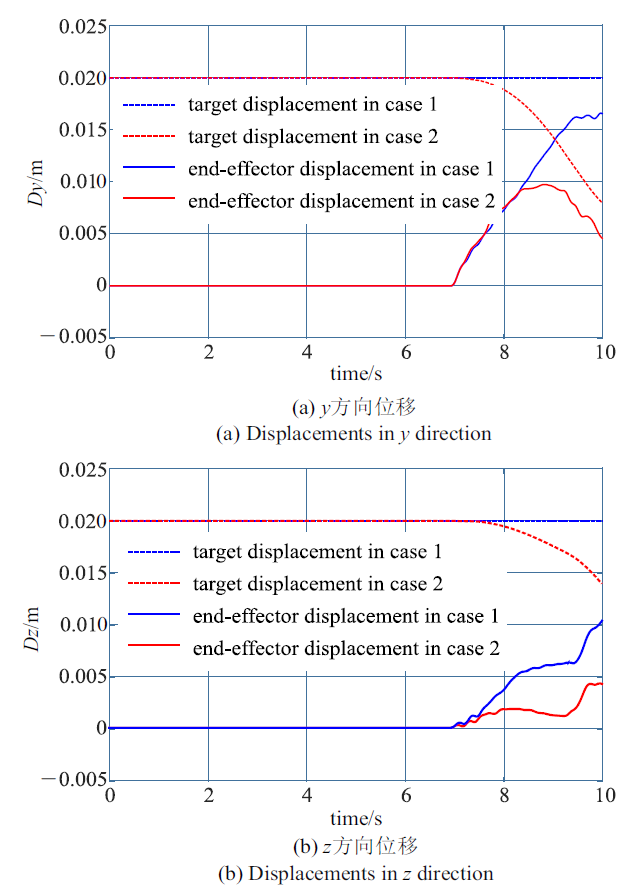
其中基座质量40 t,漂浮目标质量10 t. 末端执行器参数与2.1节内容一致, 两工况初始位置容差与角度容差均相同, 两径向容差均为0.02 m, 轴向初始距离0.12 m, 角度容差采用欧拉角描述, 三方向均为2$^\circ$. 由于软捕获过程主要影响抓捕操作初始阶段捕获杆与末端执行器径向相对位置, 因此图10 给出了仿真过程中目标与末端的径向位移. 由于工况1中目标固定, 因此主要靠机械臂末端运动向中间靠近, 而工况2中目标与机械臂末端同时发生靠近运动.
图 10
图 10
在轨任务仿真结果运动信息
Fig. 10
Simulation displacement of the two operations
从图10 中可以看出, 7 s左右柔性捕获结构开始与捕获杆发生接触, 而后两者相对径向位置逐渐减小, $y$方向从20 mm缩减到了最终5 mm以下, $z$方向从20 mm缩减到了最终10 mm以下. 之后较小的容差可以依靠后续拖动过程中的刚性对接机构来完成.
4 结论
本文采用绝对节点坐标法柔性绳索单元建立了空间机械臂末端执行器的软捕获过程动力学模型, 针对末端执行器软捕获过程开展了研究, 充分考虑了实际工程下的空间构型并建立了绳索与目标捕获杆的接触动力学模型. 设计了空间三维的悬吊实验, 对所建立的动力学模型进行了验证, 证明了模型的准确性. 最后, 采用所建模型与空间机械臂动力学模型进行联合仿真, 对两种空间机械臂任务典型工况进行了分析. 研究结果可以为在轨服务研究和工程实践提供一定的参考价值和理论基础.
参考文献
View Option
[1]
Flores-Abad A Ma O Pham K , et al . A review of space robotics technologies for on-orbit servicing
Progress in Aerospace Sciences 2014 ,68 :1 -26
[本文引用: 1]
[2]
Yao HX Ren WY Ma O , et al . Understanding the true dynamics of space manipulators from air-bearing based ground testing
Journal of Guidance, Control, and Dynamics 2018 ,41 (11 ):2425 -2434
[本文引用: 1]
[3]
刘茜 , 肖轩 , 程靖 等 . 面向空间机械臂任务验证的硬件在环半物理仿真系统研究
载人航天 , 2019 ,25 (2 ):227 -235
[本文引用: 1]
( Liu Qian Xiao Xuan Cheng Jing , et al . Study on hardware-in-the-loop simulation facility for task verification of space manipulator
Manned Spaceflight 2019 ,25 (2 ):227 -235 (in Chinese))
[本文引用: 1]
[4]
于思淼 , 郑淑涛 , 杨宇 等 . 机械臂柔性对接半物理仿真系统特性分析
哈尔滨工业大学学报 , 2019 ,51 (7 ):24 -32
[本文引用: 1]
( Yu Simiao Zheng Shutao Yang Yu , et al . Characteristics analysis of hardware-in-the-loop simulation system for manipulator flexible docking
Journal of Harbin Institute of Technology 2019 ,51 (7 ):24 -32 (in Chinese))
[本文引用: 1]
[5]
曹登庆 , 白坤朝 , 丁虎 等 . 大型柔性航天器动力学与振动控制研究进展
力学学报 , 2019 ,51 (1 ):1 -13
[本文引用: 1]
( Cao Dengqing Bai Kunchao Ding Hu , et al . Advances in dynamics and vibration control of large-scale flexible spacecraft
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (1 ):1 -13 (in Chinese))
[本文引用: 1]
[6]
付晓东 , 陈力 . 全柔性空间机器人运动振动一体化输入受限重复学习控制
力学学报 , 2020 ,52 (1 ):171 -183
( Fu Xiaodong Chen Li . An input limited repetitive learning control of flexible-base two-flexible-link and two-flexible-joint space robot with integration of motion and vibration
Chinese Journal of Theoretical and Applied Mechanics 2020 ,52 (1 ):171 -183 (in Chinese))
[7]
朱安 , 陈力 . 配置柔顺机构空间机器人双臂捕获卫星操作力学模拟及基于神经网络的全阶滑模避撞柔顺控制
力学学报 , 2019 ,51 (4 ):1156 -1169
[本文引用: 1]
( Zhu An Chen Li . Mechanical simulation and full order sliding mode collision avoidance compliant control based on neural network of dual-arm space robot with compliant mechanism capturing satellite
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (4 ):1156 -1169 (in Chinese))
[本文引用: 1]
[8]
Feng F Tang LN Xu JF , et al . A review of the end-effector of large space manipulator with capabilities of misalignment tolerance and soft capture
Science China $($Technological Sciences$)$ 2016 ,59 (11 ):1621 -1638
[本文引用: 1]
[9]
介党阳 . 空间大型机械臂末端执行器抓捕控制及载运轨迹研究[博士论文]
哈尔滨: 哈尔滨工业大学 , 2012
[本文引用: 1]
( Jie Dangyang . Study on capture control of a large space manipulator end effector and transporting trajectory [PhD Thesis]
Harbin: Harbin Institute of Technology , 2012 (in Chinese))
[本文引用: 1]
[10]
丰飞 . 空间大容差末端执行器及其软捕获策略研究[博士论文]
哈尔滨: 哈尔滨工业大学 , 2013
[本文引用: 3]
( Feng Fei . Research on space large misalignment tolerance end-effector and its soft capture strategy.[PhD Thesis]
Harbin: Harbin Institute of Technology , 2013 (in Chinese))
[本文引用: 3]
[11]
潘冬 , 魏承 , 田浩 等 . 空间大型末端执行器捕获动力学与实验研究
宇航学报 , 2014 ,35 (10 ):1120 -1126
[本文引用: 1]
( Pan Dong Wei Cheng Tian Hao , et al . Capturing dynamics and experiment of the space large end effector
Journal of Astronautics 2014 ,35 (10 ):1120 -1126 (in Chinese))
[本文引用: 1]
[12]
Zhang Y Wei C Pan D , et al . A dynamical approach to space capturing procedure using flexible cables
Aircraft Engineering and Eerospace Technology 2016 ,88 (1 ):53 -65
[本文引用: 1]
[13]
Zhang Y Wei C Zhao Y , et al . Adaptive ANCF method and its application in planar flexible cables
Acta Mechanica Sinica 2018 ,34 (1 ):199 -213
[本文引用: 1]
[14]
荣吉利 , 辛鹏飞 , 诸葛迅 等 . 空间大型末端执行器柔性绳索捕获动力学研究
兵工学报 , 2016 ,37 (9 ):1730 -1737
[本文引用: 1]
( Rong Jili Xin Pengfei Zhuge Xun , et al . Capturing dynamics of flexible ropes for space large-scale end effector
Acta Armamentarii 2016 ,37 (9 ):1730 -1737 (in Chinese))
[本文引用: 1]
[15]
张龙 . 空间圈套式绳索捕获动力学建模及接触碰撞分析
振动与冲击 , 2019 ,38 (10 ):71 -78
[本文引用: 1]
( Zhang Long . Dynamics modelling and contact-impact analysis during space snare capture
Journal of Vibration and Shock 2019 ,38 (10 ):71 -78 (in Chinese))
[本文引用: 1]
[16]
孙加亮 , 田强 , 胡海岩 . 多柔体系统动力学建模与优化研究进展
力学学报 , 2019 ,51 (6 ):1565 -1586
[本文引用: 1]
( Sun Jialiang Tian Qiang Hu Haiyan . Advances in dynamic modeling and optimization of flexible multibody systems
Chinese Journal of Theoretical and Applied Mechanics 2019 51 (6 ):1565 -1586 (in Chinese))
[本文引用: 1]
[17]
Bauchau OA . Flexible Multibody Dynamics
Netherlands: Springer , 2011
[本文引用: 1]
[18]
Shabana AA Dynamics of Multibody System . New York : Cambridge University Press , 2005
[本文引用: 1]
[19]
Gerstmayr J Shabana AA . Analysis of thin beams and cables using the absolute nodal co-ordinate formulation
Nonlinear Dynamics 2006 ,45 :109 -130
[本文引用: 2]
[20]
Liu C Tian Q Hu HY . New spatial curved beam and cylindrical shell elements of gradient-deficient absolute nodal coordinate formulation
Nonlinear Dynamics 2012 ,70 (3 ):1903 -1918
[21]
范纪华 , 章定国 , 谌宏 . 基于绝对节点坐标法的弹性线方法研究
力学学报 , 2019 ,51 (5 ):1455 -1465
( Fan Jihua Zhang Dingguo Shen Hong . Research on elastic line method based on absolute nodal coordinate method
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (5 ):1455 -1465 (in Chinese))
[22]
过佳雯 , 魏承 , 谭春林 等 . 含芯拧绞绳非线性弯曲动力学特性分析与研究
力学学报 , 2018 ,50 (2 ):373 -384
( Guo Jiawen Wei Cheng Tan Chunlin , et al . Analysis of the cored stranded wire rope on the nonlinear bending dynamic characteristics
Chinese Journal of Theoretical and Applied Mechanics 2018 ,50 (2 ):373 -384 (in Chinese))
[23]
Wang BJ Li QB Liu TY , et al . Analysis of cable under dynamic contact and large deformation
Ksce Journal of Civil Engineering 2019 ,23 (4 ):1626 -1635
[24]
齐朝辉 , 国树东 , 卓英鹏 . 滑轮绳索系统中动态节点绳索单元
力学学报 , 2019 ,51 (6 ):1856 -1871
[本文引用: 1]
( Qi Zhaohui Guo Shudong Zhuo Yingpeng . Rope elements with moving nodes in rope-pully systems
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (6 ):1856 -1871 (in Chinese))
[本文引用: 1]
[25]
Li YY Wang C Huang WH . Dynamics analysis of planar rigid-flexible coupling deployable solar array system with multiple revolute clearance joints
Mechanical Systems and Signal Processing 2019 ,117 :188 -209
[本文引用: 1]
[26]
Fu KJ Zhao ZH Ren GX , et al . From multiscale modeling to design of synchronization mechanisms in mesh antennas
Acta Astronautica 2019 ,159 :156 -165
[27]
Tang LL Liu JY . Modeling and analysis of sliding joints with clearances in flexible multibody systems
Nonlinear Dynamics 2018 ,94 :2423 -2440
[本文引用: 1]
[28]
Hu HY Tian Q Liu, C . Computational dynamics of soft machines
Acta Mechanica Sinica 2017 ,33 (3 ):516 -528
DOI
URL
[本文引用: 1]
[29]
Sun DW Liu C Hu HY . Dynamic computation of 2D segment-to-segment frictionless contact for a flexible multibody system subject to large deformation
Mechanism and Machine Theory 2019 ,140 :350 -376
[本文引用: 1]
[30]
Lan P Cui YQ Yu ZQ . A novel absolute nodal coordinate formulation thin plate tire model with fractional derivative viscosity and surface integral-based contact algorithm
Proceedings of the Institution of Mechanical Engineers Part K-Journal of Multi-Body Dynamics 2019 ,233 (3 ):583 -597
[31]
Cui LL Wang HS Chen WD . Trajectory planning of a spatial flexible manipulator for vibration suppression
Robotics and Autonomous Systems 2020 ,123 :1 -11
[32]
Chen YZ Zhang DG Li L . Dynamic analysis of rotating curved beams by using Absolute Nodal Coordinate Formulation based on radial point interpolation method
Journal of Sound and Vibration 2019 , 441: 63 :83
[本文引用: 1]
[33]
Wu S Mou FL Liu Q , et al . Contact dynamics and control of a space robot capturing a tumbling object
Acta Astronaut 2018 ,151 :532 -542
[本文引用: 1]
[34]
洪嘉振 . 计算多体系统动力学 . 北京 : 高等教育出版社 , 1999 : 44 -46
[本文引用: 1]
( Hong Jiazhen Computational Dynamics of Multibody Systems . Beijing : Higher Education Press, Beijing , 1999 : 44 -46 (in Chinese))
[本文引用: 1]
[35]
Negrut D Rampalli R Ottarsson G , et al . On an implementation of the Hilber-Hughes-Taylor method in the context of index 3 differential-algebraic equations of multibody dynamics
Journal of Computational and Nonlinear Dynamics 2007 ,2 (1 ):73 -85
[本文引用: 1]
[36]
危清清 , 刘志全 , 王耀兵 等 . 柔性机械臂辅助空间站舱段对接阻抗控制
中国空间科学技术 , 2014 ,6 :57 -64
[本文引用: 1]
( Wei Qingqing Liu Zhiquan Wang Yaobing , et al . Impedance control of space flexible manipulator system assisted docking of space station
Chinese Space Science and Technology 2014 ,6 :57 -64 (in Chinese))
[本文引用: 1]
[37]
李大明 , 饶炜 , 胡成威 等 . 空间站机械臂关键技术研究
载人航天 , 2014 ,20 (3 ):238 -242
[本文引用: 1]
( Li Daming Rao Wei Hu Chengwei , et al . Key technology review of the research on the space station manipulator
Manned Spaceflight 2014 ,20 (3 ):238 -242 (in Chinese))
[本文引用: 1]
A review of space robotics technologies for on-orbit servicing
1
2014
... 空间机械臂是深入开展载人航天活动必不可少的工具, 它在空间站系统中承担着舱段捕获与转移、仪器设备转移与安装、辅助航天员作业等功能[1 ] . 末端执行器是空间机械臂系统的重要组成部分, 安装在机械臂的两端(腕、肩回转关节), 能够实现对合作目标的捕获、锁定、电气连接, 同时能完成对目标的解锁释放功能. ...
Understanding the true dynamics of space manipulators from air-bearing based ground testing
1
2018
... 末端执行器对目标载荷的成功抓捕是空间机械臂完成舱外状态巡检、舱段转位、悬停飞行器捕获等任务的关键. 由于平面气浮台试验[2 ] 在约束和操作空间等方面都受到一定的限制, 因此为满足机械臂在轨工况全覆盖的验证要求, 需要对在轨任务进行一定的仿真模拟, 作为气浮式零重力地面二维物理试验和三维半物理试验[3 -4 ] 的必要补充. ...
面向空间机械臂任务验证的硬件在环半物理仿真系统研究
1
2019
... 末端执行器对目标载荷的成功抓捕是空间机械臂完成舱外状态巡检、舱段转位、悬停飞行器捕获等任务的关键. 由于平面气浮台试验[2 ] 在约束和操作空间等方面都受到一定的限制, 因此为满足机械臂在轨工况全覆盖的验证要求, 需要对在轨任务进行一定的仿真模拟, 作为气浮式零重力地面二维物理试验和三维半物理试验[3 -4 ] 的必要补充. ...
面向空间机械臂任务验证的硬件在环半物理仿真系统研究
1
2019
... 末端执行器对目标载荷的成功抓捕是空间机械臂完成舱外状态巡检、舱段转位、悬停飞行器捕获等任务的关键. 由于平面气浮台试验[2 ] 在约束和操作空间等方面都受到一定的限制, 因此为满足机械臂在轨工况全覆盖的验证要求, 需要对在轨任务进行一定的仿真模拟, 作为气浮式零重力地面二维物理试验和三维半物理试验[3 -4 ] 的必要补充. ...
机械臂柔性对接半物理仿真系统特性分析
1
2019
... 末端执行器对目标载荷的成功抓捕是空间机械臂完成舱外状态巡检、舱段转位、悬停飞行器捕获等任务的关键. 由于平面气浮台试验[2 ] 在约束和操作空间等方面都受到一定的限制, 因此为满足机械臂在轨工况全覆盖的验证要求, 需要对在轨任务进行一定的仿真模拟, 作为气浮式零重力地面二维物理试验和三维半物理试验[3 -4 ] 的必要补充. ...
机械臂柔性对接半物理仿真系统特性分析
1
2019
... 末端执行器对目标载荷的成功抓捕是空间机械臂完成舱外状态巡检、舱段转位、悬停飞行器捕获等任务的关键. 由于平面气浮台试验[2 ] 在约束和操作空间等方面都受到一定的限制, 因此为满足机械臂在轨工况全覆盖的验证要求, 需要对在轨任务进行一定的仿真模拟, 作为气浮式零重力地面二维物理试验和三维半物理试验[3 -4 ] 的必要补充. ...
大型柔性航天器动力学与振动控制研究进展
1
2019
... 柔性附件在航天器系统中有着广泛的应用[5 -7 ] , 得益于大捕获容差的特点[8 ] , 末端执行器的绳索式柔性捕获机构被广泛用于国际空间站等航天器的机械臂末端. 其理论分析和仿真研究也是近年来国内外学者关注的重点. ...
大型柔性航天器动力学与振动控制研究进展
1
2019
... 柔性附件在航天器系统中有着广泛的应用[5 -7 ] , 得益于大捕获容差的特点[8 ] , 末端执行器的绳索式柔性捕获机构被广泛用于国际空间站等航天器的机械臂末端. 其理论分析和仿真研究也是近年来国内外学者关注的重点. ...
全柔性空间机器人运动振动一体化输入受限重复学习控制
2020
全柔性空间机器人运动振动一体化输入受限重复学习控制
2020
配置柔顺机构空间机器人双臂捕获卫星操作力学模拟及基于神经网络的全阶滑模避撞柔顺控制
1
2019
... 柔性附件在航天器系统中有着广泛的应用[5 -7 ] , 得益于大捕获容差的特点[8 ] , 末端执行器的绳索式柔性捕获机构被广泛用于国际空间站等航天器的机械臂末端. 其理论分析和仿真研究也是近年来国内外学者关注的重点. ...
配置柔顺机构空间机器人双臂捕获卫星操作力学模拟及基于神经网络的全阶滑模避撞柔顺控制
1
2019
... 柔性附件在航天器系统中有着广泛的应用[5 -7 ] , 得益于大捕获容差的特点[8 ] , 末端执行器的绳索式柔性捕获机构被广泛用于国际空间站等航天器的机械臂末端. 其理论分析和仿真研究也是近年来国内外学者关注的重点. ...
A review of the end-effector of large space manipulator with capabilities of misalignment tolerance and soft capture
1
2016
... 柔性附件在航天器系统中有着广泛的应用[5 -7 ] , 得益于大捕获容差的特点[8 ] , 末端执行器的绳索式柔性捕获机构被广泛用于国际空间站等航天器的机械臂末端. 其理论分析和仿真研究也是近年来国内外学者关注的重点. ...
空间大型机械臂末端执行器抓捕控制及载运轨迹研究[博士论文]
1
2012
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
空间大型机械臂末端执行器抓捕控制及载运轨迹研究[博士论文]
1
2012
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
空间大容差末端执行器及其软捕获策略研究[博士论文]
3
2013
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
... 空间机械臂的在轨捕获过程分为3个阶段[10 ] :软捕获、拖动和锁定. 软捕获阶段又称为柔性预捕获, 通过柔性捕获机构在较大的捕获容差范围内将目标适配器上的捕获杆进行缠绕, 约束在较小的运动范围内; 拖动阶段通过内部电机运转拉近目标适配器与机械臂末端执行器的距离, 拉近过程中通过刚性导向机构进行容差校正, 实现目标适配器与末端执行器的完全对齐; 最终通过刚性锁定机构实现机械锁定和电信号连接. 其中, 软捕获阶段柔性捕获机构的成功操作是后续两阶段的先决条件, 并且是解决在轨控制精度带来的大捕获容差和导向机构刚性接触等挑战的关键. ...
空间大容差末端执行器及其软捕获策略研究[博士论文]
3
2013
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
... 空间机械臂的在轨捕获过程分为3个阶段[10 ] :软捕获、拖动和锁定. 软捕获阶段又称为柔性预捕获, 通过柔性捕获机构在较大的捕获容差范围内将目标适配器上的捕获杆进行缠绕, 约束在较小的运动范围内; 拖动阶段通过内部电机运转拉近目标适配器与机械臂末端执行器的距离, 拉近过程中通过刚性导向机构进行容差校正, 实现目标适配器与末端执行器的完全对齐; 最终通过刚性锁定机构实现机械锁定和电信号连接. 其中, 软捕获阶段柔性捕获机构的成功操作是后续两阶段的先决条件, 并且是解决在轨控制精度带来的大捕获容差和导向机构刚性接触等挑战的关键. ...
空间大型末端执行器捕获动力学与实验研究
1
2014
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
空间大型末端执行器捕获动力学与实验研究
1
2014
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
A dynamical approach to space capturing procedure using flexible cables
1
2016
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
Adaptive ANCF method and its application in planar flexible cables
1
2018
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
空间大型末端执行器柔性绳索捕获动力学研究
1
2016
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
空间大型末端执行器柔性绳索捕获动力学研究
1
2016
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
空间圈套式绳索捕获动力学建模及接触碰撞分析
1
2019
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
空间圈套式绳索捕获动力学建模及接触碰撞分析
1
2019
... 介党阳[9 ] 研究了空间大型机械臂末端执行器抓捕控制及载荷运输的轨迹问题, 针对载荷运输任务对航天器本体产生的姿态扰动设计了控制算法. 丰飞[10 ] 分析了末端执行器的软捕获策略, 并着重分析了末端执行器的设计方案和工作原理. 潘冬等[11 ] 采用多段刚性微元的形式来模拟柔性绳索的动力学特性, 建立了末端执行器柔性捕获机构的动力学模型, 并通过气浮实验对比了捕获过程中接触力的变化. Zhang等[12 -13 ] 等采用改进的二维平面绝对节点坐标单元建立了软捕获过程动力学模型, 并分析了软捕获过程中接触力的变化以及捕获策略对接触力的影响. 荣吉利等[14 ] 采用绝对节点坐标法建立了末端执行器柔性绳索的捕获动力学模型, 仿真分析了柔性绳索缠绕漂浮卫星的动力学过程. 张龙[15 ] 分析了空间圈套式绳索捕获机构的捕获动力学建模, 并分析了捕获过程中的接触碰撞问题. 上述研究对末端执行器柔性捕获机构的原理分析和理论建模取得了丰硕的成果. 然而, 大部分对建模过程和验证方案进行了一定简化, 用多段刚性微元代替柔性绳索, 或将空间问题简化为平面问题研究, 而即使考虑了实际的三维空间构型, 在实验验证方面仍然有待补充. ...
多柔体系统动力学建模与优化研究进展
1
2019
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
多柔体系统动力学建模与优化研究进展
1
2019
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
Flexible Multibody Dynamics
1
2011
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
1
2005
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
Analysis of thin beams and cables using the absolute nodal co-ordinate formulation
2
2006
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
... 本节采用绝对节点坐标法的绳索单元[19 ] 对柔性绳索进行建模, 由于实际工程中绳索扭转变形影响较小, 该单元考虑了绳索的弯曲变形和拉伸变形, 忽略扭转弹性变形的影响. ...
New spatial curved beam and cylindrical shell elements of gradient-deficient absolute nodal coordinate formulation
2012
含芯拧绞绳非线性弯曲动力学特性分析与研究
2018
含芯拧绞绳非线性弯曲动力学特性分析与研究
2018
Analysis of cable under dynamic contact and large deformation
2019
滑轮绳索系统中动态节点绳索单元
1
2019
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
滑轮绳索系统中动态节点绳索单元
1
2019
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
Dynamics analysis of planar rigid-flexible coupling deployable solar array system with multiple revolute clearance joints
1
2019
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
From multiscale modeling to design of synchronization mechanisms in mesh antennas
2019
Modeling and analysis of sliding joints with clearances in flexible multibody systems
1
2018
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
Computational dynamics of soft machines
1
2017
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
Dynamic computation of 2D segment-to-segment frictionless contact for a flexible multibody system subject to large deformation
1
2019
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
A novel absolute nodal coordinate formulation thin plate tire model with fractional derivative viscosity and surface integral-based contact algorithm
2019
Trajectory planning of a spatial flexible manipulator for vibration suppression
2020
Dynamic analysis of rotating curved beams by using Absolute Nodal Coordinate Formulation based on radial point interpolation method
1
2019
... 随着理论研究的深入, 对柔性绳索的建模研究在近几十年来取得了长足的发展[16 ] , 在非线性有限元和连续介质力学理论的支撑下, 发展出了几何精确梁理论[17 ] 和绝对节点坐标方法[18 ] 等高效建模理论. 随着航天任务对柔性附件需求的发展, 相关理论被不断探索与改进[19 -24 ] , 被应用于多种复杂柔性航天器系统[25 -27 ] 、软体机器人[28 ] 及其他大变形问题的动力学仿真与接触碰撞分析中[29 -32 ] . 相比于多段微元近似的方法, 该建模理论的主要优势在于单个单元本身便能够模拟柔性绳索的几何非线性特征, 因此对于柔性体, 采用少数的单元即可精确的表示出大变形问题, 而多段刚性微元则需要几十上百个刚体来模拟一段绳索或其他柔性结构[10 ] . ...
Contact dynamics and control of a space robot capturing a tumbling object
1
2018
... 接触力计算采用赫兹接触碰撞模型[33 ] , 由于捕获杆表面光滑度较高, 摩擦影响较小, 因此采用简单的库伦摩擦模型计算摩擦力 ...
1
1999
... 同时建立与实验方案等效的地面悬吊仿真模型, 弹簧刚度采用测量值2042.5 N/m, 柔性绳索弹性模量20 GPa, 密度7800 kg/m$^{3}$, 每根绳索取10个绝对节点坐标绳索单元来模拟. 初始位置误差设置为$x=0.236 9$ m, $y=0.074 7$ m, $z=0.040 2$ m; 初始姿态表示为欧拉四元数[34 ] 的形式, 为$[0.999 3, 0.034 5, -0.007 5, -0.010 8]$. 仿真过程中采用HHT-$\alpha$方法[35 ] 进行数值积分, 步长$1.0\times10^{-5}$ s. 软捕获过程转动环角速度为8($^\circ$)/s, 全程转动80$^\circ$, 软捕获过程持续10 s. ...
1
1999
... 同时建立与实验方案等效的地面悬吊仿真模型, 弹簧刚度采用测量值2042.5 N/m, 柔性绳索弹性模量20 GPa, 密度7800 kg/m$^{3}$, 每根绳索取10个绝对节点坐标绳索单元来模拟. 初始位置误差设置为$x=0.236 9$ m, $y=0.074 7$ m, $z=0.040 2$ m; 初始姿态表示为欧拉四元数[34 ] 的形式, 为$[0.999 3, 0.034 5, -0.007 5, -0.010 8]$. 仿真过程中采用HHT-$\alpha$方法[35 ] 进行数值积分, 步长$1.0\times10^{-5}$ s. 软捕获过程转动环角速度为8($^\circ$)/s, 全程转动80$^\circ$, 软捕获过程持续10 s. ...
On an implementation of the Hilber-Hughes-Taylor method in the context of index 3 differential-algebraic equations of multibody dynamics
1
2007
... 同时建立与实验方案等效的地面悬吊仿真模型, 弹簧刚度采用测量值2042.5 N/m, 柔性绳索弹性模量20 GPa, 密度7800 kg/m$^{3}$, 每根绳索取10个绝对节点坐标绳索单元来模拟. 初始位置误差设置为$x=0.236 9$ m, $y=0.074 7$ m, $z=0.040 2$ m; 初始姿态表示为欧拉四元数[34 ] 的形式, 为$[0.999 3, 0.034 5, -0.007 5, -0.010 8]$. 仿真过程中采用HHT-$\alpha$方法[35 ] 进行数值积分, 步长$1.0\times10^{-5}$ s. 软捕获过程转动环角速度为8($^\circ$)/s, 全程转动80$^\circ$, 软捕获过程持续10 s. ...
柔性机械臂辅助空间站舱段对接阻抗控制
1
2014
... 结合上述模型, 对常见在轨任务进行了联合仿真分析, 图8 为联合仿真结构框架, 其中柔性捕获机构动力学模型、拖动传动机构、刚性对接机构接触动力学模型和控制程序联合组成末端执行器动力学模型, 该模型与空间机械臂模型[36 ] 、被捕获目标模型组成任务仿真系统. 根据空间机械臂的主要任务设计方案, 本文选取了舱外状态巡检(工况1)和悬停飞行器捕获(工况2)两种典型任务[37 ] 下的软捕获动力学仿真过程进行分析. ...
柔性机械臂辅助空间站舱段对接阻抗控制
1
2014
... 结合上述模型, 对常见在轨任务进行了联合仿真分析, 图8 为联合仿真结构框架, 其中柔性捕获机构动力学模型、拖动传动机构、刚性对接机构接触动力学模型和控制程序联合组成末端执行器动力学模型, 该模型与空间机械臂模型[36 ] 、被捕获目标模型组成任务仿真系统. 根据空间机械臂的主要任务设计方案, 本文选取了舱外状态巡检(工况1)和悬停飞行器捕获(工况2)两种典型任务[37 ] 下的软捕获动力学仿真过程进行分析. ...
空间站机械臂关键技术研究
1
2014
... 结合上述模型, 对常见在轨任务进行了联合仿真分析, 图8 为联合仿真结构框架, 其中柔性捕获机构动力学模型、拖动传动机构、刚性对接机构接触动力学模型和控制程序联合组成末端执行器动力学模型, 该模型与空间机械臂模型[36 ] 、被捕获目标模型组成任务仿真系统. 根据空间机械臂的主要任务设计方案, 本文选取了舱外状态巡检(工况1)和悬停飞行器捕获(工况2)两种典型任务[37 ] 下的软捕获动力学仿真过程进行分析. ...
空间站机械臂关键技术研究
1
2014
... 结合上述模型, 对常见在轨任务进行了联合仿真分析, 图8 为联合仿真结构框架, 其中柔性捕获机构动力学模型、拖动传动机构、刚性对接机构接触动力学模型和控制程序联合组成末端执行器动力学模型, 该模型与空间机械臂模型[36 ] 、被捕获目标模型组成任务仿真系统. 根据空间机械臂的主要任务设计方案, 本文选取了舱外状态巡检(工况1)和悬停飞行器捕获(工况2)两种典型任务[37 ] 下的软捕获动力学仿真过程进行分析. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}