引言
动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解.
负刚度元件因其承载能力大、变形小、可控性好的优点, 近年来被广泛应用于系统减振之中. Acar等[14 ] 提出了可以有效降低主系统振幅的含负刚度无阻尼DVA. 申永军等[15 -18 ] 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化.
惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中.
惯容可以在基本不改变结构物理质量的前提下改变系统的惯性特征, 接地刚度可以调整系统的刚度特性, 这两种器件均可改变系统固有频率, 进而提高吸振器性能. 但目前的大多数研究仅仅是在吸振器中单独引入惯容或接地刚度结构. 而随着设备对抑制振动需求的增加, 此类吸振器的性能难以满足工程实践需求的增长. 少部分同时含有两种元件的吸振器也仅是将惯容接地, 相当于增加了子系统质量, 并不能体现惯容的两端点惯性特征. 本文旨在研究惯容和接地刚度的共同作用对系统稳定性和吸振特性产生的影响, 提高吸振器的减振特性.
通过在经典Voigt型动力吸振器中附加惯容和接地弹簧元件, 设计出一种新型动力吸振器模型. 利用固定点理论对该模型的刚度和阻尼进行了参数优化, 发现惯容和接地刚度共同作用时, 惯容存在最佳工作范围. 通过与其他类型动力吸振器模型进行对比, 证明了含惯容和接地刚度的模型在减振方面有着很大优势, 能够极大地降低主系统振幅, 同时拓宽了减振频带, 为工程实践中设计新型有效的动力吸振器提供参考.
1 动力吸振器模型及参数优化
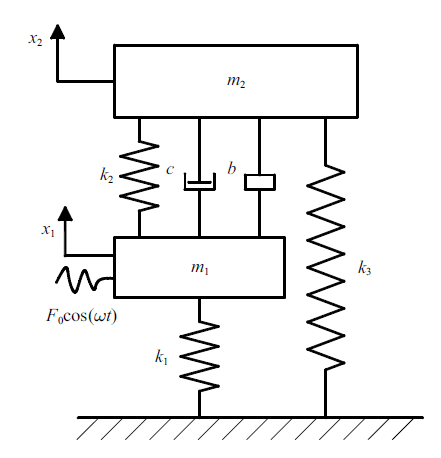
图1 为本文所提出的动力吸振器模型, 其中$m_{1} $和$m_{2} $分别表示主系统质量和动力吸振器质量, $k_{1} $和$k_{2} $分别表示主系统和吸振器刚度, $k_{3} $表示接地弹簧刚度系数, $c$表示吸振器阻尼系数, $b$表示惯容系数, $F_{0} $与$\omega $分别代表激振力的振幅与频率.
图1
图1
含惯容和接地刚度的动力吸振器模型
Fig.1
Dynamic vibration absorber model with inerter and grounded stiffness spring
(1) $\begin{eqnarray} \left. {\begin{array}{l} m_{1} \ddot{{x}}_{1} +k_{1} x_{1} +k_{2} \left( {x_{1} -x_{2} } \right)+c\left( {\dot{{x}}_{1} -\dot{{x}}_{2} } \right) +\\\qquad b\left( {\ddot{{x}}_{1} -\ddot{{x}}_{2} } \right)=F_{0} \mbox{cos}\left( {\omega t} \right) \\ m_{2} \ddot{{x}}_{2} +k_{3} x_{2} +k_{2} \left( {x_{2} -x_{1} } \right)+c\left( {\dot{{x}}_{2} -\dot{{x}}_{1} } \right) +\\\qquad b\left( {\ddot{{x}}_{2} -\ddot{{x}}_{1} } \right)=0 \\ \end{array}} \right\} \end{eqnarray}$
$\begin{eqnarray*} \left. {\begin{array}{l} \mu =\dfrac{m_{2} }{m_{1} },\ \ \omega_{1} =\sqrt {\dfrac{k_{1} }{m_{1} }} ,\ \ \omega_{2} =\sqrt {\dfrac{k_{2} }{m_{2} }} ,\ \ \xi =\dfrac{c}{2m_{2} \omega_{2} } \\[2mm] f=\dfrac{F_{0} }{m_{1} },\ \ \alpha =\dfrac{k_{3} }{k_{1} },\ \ \beta =\dfrac{b}{m_{1} } \end{array}} \right. \end{eqnarray*}$
(2) $\begin{eqnarray} \left. {\begin{array}{l} \ddot{{x}}_{1} +\omega_{1}^{2} x_{1} +\mu \omega_{2}^{2} \left( {x_{1} -x_{2} } \right)+2\mu \omega_{2} \xi \left( {\dot{{x}}_{1} -\dot{{x}}_{2} } \right) +\\\qquad \beta \left( {\ddot{{x}}_{1} -\ddot{{x}}_{2} } \right)=f\mbox{cos}\left( {\omega t} \right) \\ \ddot{{x}}_{2} +\dfrac{\alpha }{\mu }\omega_{1}^{2} x_{2} +\omega_{2}^{2} \left( {x_{2} -x_{1} } \right)+2\omega_{2} \xi \left( {\dot{{x}}_{2} -\dot{{x}}_{1} } \right) +\\[2mm]\qquad \dfrac{\beta }{\mu }\left( {\ddot{{x}}_{2} -\ddot{{x}}_{1} } \right)=0 \\ \end{array}} \right\} \end{eqnarray}$
1.1 解析解
(3) $\begin{eqnarray} \label{eq3} x_{1} =X_{1} {\rm e}^{{\rm j}\omega t},\ \ x_{2} =X_{2} {\rm e}^{{\rm j}\omega t} \end{eqnarray}$
(4) $\begin{eqnarray} \label{eq4} X_{1} =\dfrac{f\left( {{\rm j}A_{1} +B_{1} } \right)}{{\rm j}C_{1} +D_{1} },\ \ X_{2} =\dfrac{f\left( {{\rm j}A_{2} +B_{2} } \right)}{{\rm j}C_{1} +D_{1} } \end{eqnarray}$
(5) $\begin{eqnarray} \left. {\begin{array}{l} A_{1} =2\mu \omega \omega_{2} \xi \\ B_{1} =-\omega^{2}\left( {\beta +\mu } \right)+\alpha \omega_{1}^{2} +\mu \omega_{2}^{2} \\ C_{1} =2\omega^{3}\omega_{2} \mu \xi \left( {1+\mu } \right)-2\omega_{1}^{2} \omega \omega_{2} \mu \xi \left( {1+\alpha } \right) \\ D_{1} =\omega^{4}\left[ {\mu +\left( {1+\mu } \right)} \right] -\omega^{2}\omega_{1}^{2} \left( {\alpha +\beta +\alpha \beta +\mu } \right)+\\\qquad \alpha \omega_{1}^{4} + \mu \omega_{2}^{2} \left[ {-\omega^{2}\left( {1+\mu } \right)+\omega_{1}^{2} \left( {1+\alpha } \right)} \right] \\ A_{2} =2\mu \omega \omega_{2} \xi \\ B_{2} =\mu \omega_{2}^{2} -\omega^{2}\beta \\ \end{array}} \right\} \end{eqnarray}$
$\begin{eqnarray*} \lambda =\dfrac{\omega }{\omega_{1} },\ \ v=\dfrac{\omega_{2} }{\omega_{1} },\ \ X_{{\rm st}} =\dfrac{F_{0} }{k_{1} } \end{eqnarray*}$
(6) $\begin{eqnarray} \label{eq6} A^{2}=\left|\dfrac{X_{1} }{X_{{\rm st}} }\right|^{2}=\dfrac{\xi^{2}A_{3}^{2} +B_{3}^{2} }{\xi^{2}C_{2}^{2} +D_{2}^{2} } \end{eqnarray}$
(7) $\begin{eqnarray} \left. {\begin{array}{l} A_{3} =2v\mu \lambda \\[2mm] B_{3} =\alpha +v^{2}\mu -\lambda^{2}\left( {\beta +\mu } \right) \\[2mm] C_{2} =2\mu v\lambda \left[ {1+\alpha -\lambda^{2}\left( {1+\mu } \right)} \right] \\[2mm] D_{2} =\alpha -\lambda^{2}\left( {\alpha +\beta +\alpha \beta +\mu } \right) +\lambda^{4}\left( {\beta +\mu +\beta \mu } \right)+\\[2mm]\qquad v^{2}\mu \left[ {1+\alpha -\lambda^{2}\left( {1+\mu } \right)} \right] \\ \end{array}} \right\} \end{eqnarray}$
(8) $\begin{eqnarray} \omega_{1,2}^{ '2} =\dfrac{\left( {\alpha +\beta +\alpha \beta +\mu } \right)\omega_{1}^{2} +\mu \left( {1+\mu } \right)\omega_{2}^{2} \mp \sqrt \gamma }{2\left( {\beta +\mu +\beta \mu } \right)} \end{eqnarray}$
$\begin{eqnarray*} &&\gamma =[2\alpha \left( {-1+\beta } \right)\beta +\alpha ^{2}\left( {1+\beta } \right)^{2}-2\alpha \mu \left( {1+\beta } \right) +\\&&\qquad\left( {\mu +\beta } \right)^{2}]\omega_{1}^{4} -2\mu [\beta +\mu +\left( {\beta -\mu } \right)\mu +\\&&\qquad\alpha \left( {-1+\beta +\mu +\beta \mu } \right)]\omega_{1}^{2} \omega_{2}^{2} +\mu^{2}\left( {1+\mu } \right)^{2}\omega_{2}^{4} \end{eqnarray*}$
1.2 最优参数
式(6)经简单推导, 可证明其归一化位移幅频曲线通过3个独立于阻尼比的点, 分别为频率比$\lambda =0$处的$Z$点、$\lambda =1$左右两侧的$P$和$Q$两点, 这3个点即为本吸振器模型主系统幅频曲线的固定点. 为验证本模型的固定点同时便于进行后续优化, 现任取阻尼比分别为0.3, 0.5和0.7, 绘制归一化位移幅频曲线如图2 所示, 从图中可以清楚地观察到曲线均通过$Z$, $P$和$Q$三点.
图2
图2
不同阻尼比下的归一化幅频响应曲线
Fig.2
Normalized amplitude frequency response curves under different damping ratios
根据固定点理论, 为了使两固定点处纵坐标相等,只需使阻尼比趋于零和无穷时的响应值相等, 即
(9) $\begin{eqnarray} \left|\dfrac{A_{3}}{C_{2} }\right|=\left| \dfrac{B_{3} }{D_{2} }\right| \end{eqnarray}$
(10) $\begin{eqnarray} &&\dfrac{2v\lambda \mu }{2v\lambda \mu \left[ {1+\alpha -\lambda^{2}\left( {1+\mu } \right)} \right]}= -\Big[\alpha +v^{2}\mu -\lambda^{2}\left( {\beta +\mu } \right)\Big]\Big/\\&&\qquad\Big\{\alpha -\lambda^{2}\left( {\alpha +\beta +\alpha \beta +\mu } \right)+\lambda^{4}\left( {\beta +\mu +\beta \mu } \right)+\\&&\qquad v^{2}\mu \left[ {1+\alpha -\lambda^{2}\left( {1+\mu } \right)} \right]\Big\} \end{eqnarray}$
(11) $\begin{eqnarray} &&2\alpha +\alpha^{2}+2v^{2}\mu +2v^{2}\alpha \mu +\lambda ^{4}[2\beta \left( {1+\mu } \right) +\\&&\qquad\mu \left( {2+\mu } \right)]+\lambda^{2}[-2\beta -2\mu -2v^{2}\mu \left( {1+\mu } \right) -\\&&\qquad 2\alpha \left( {1+\beta +\mu } \right)]=0 \end{eqnarray}$
假设式(11)存在2个实根$\lambda_{P} $和$\lambda_{Q} $, 由韦达定理可得
(12) $\begin{eqnarray} \label{eq12} \lambda_{P}^{2} +\lambda_{Q}^{2} =\dfrac{2\left[ {\beta +\mu +v^{2}\mu \left( {1+\mu } \right)+\alpha \left( {1+\beta +\mu } \right)} \right]}{2\beta \left( {1+\mu } \right)+\mu \left( {2+\mu } \right)} \end{eqnarray}$
同时根据固定点理论, 为使两固定点等高且幅频峰值位于两固定点处, 令$\lambda_{P}$和$\lambda_{Q}$处的响应值相等可得
(13) $\begin{eqnarray} \label{eq13} \dfrac{1}{1+\alpha -\left( {1+\mu } \right)\lambda_{P}^{2} }=\dfrac{1}{1+\alpha -\left( {1+\mu } \right)\lambda_{Q}^{2} } \end{eqnarray}$
(14) $\begin{eqnarray} \dfrac{-2\left( {1+\alpha } \right)+\left( {1+\mu } \right)\lambda_{P}^{2} +\left( {1+\mu } \right)\lambda_{Q}^{2} }{\left[ {1+\alpha -\left( {1+\mu } \right)\lambda_{P}^{2} } \right]\left[ {1+\alpha -\left( {1+\mu } \right)\lambda_{Q}^{2} } \right]}=0 \end{eqnarray}$
(15) $\begin{eqnarray} \label{eq15} && 2\beta \left( {1+\mu } \right)+2\alpha \left( {-1+\beta +\beta \mu } \right) -\\&&\qquad 2\mu \left[ {-1+v^{2}\left( {1+\mu } \right)^{2}} \right]=0 \end{eqnarray}$
(16) $\begin{eqnarray} \label{eq16} v_{{\rm opt}} =\dfrac{\sqrt {\beta +\mu +\beta \mu +\alpha \left( {-1+\beta +\beta \mu } \right)} }{\left( {1+\mu } \right)\sqrt \mu } \end{eqnarray}$
将最优频率比代入式(10)可得两个固定点处的横坐标
(17a) $\lambda_{P}^{2}=\frac{1+\alpha}{1+\mu}-\frac{\alpha-\mu}{1+\mu} \sqrt{\frac{1}{2 \beta(1+\mu)+\mu(2+\mu)}}$
(17b) $\lambda_{Q}^{2}=\frac{1+\alpha}{1+\mu}+\frac{\alpha-\mu}{1+\mu} \sqrt{\frac{1}{2 \beta(1+\mu)+\mu(2+\mu)}}$
当频率比取最优值时, $P$和$Q$两个固定点处响应的纵坐标均为
(18) $\begin{eqnarray} \left. A \right|_{\left( {\lambda_{P} ,\lambda_{Q} } \right)} =\dfrac{\sqrt {2\beta \left( {1+\mu } \right)+\mu \left( {2+\mu } \right)} }{\alpha -\mu} \end{eqnarray}$
根据式(18), 当质量比$\mu $和惯容比$\beta $为常数时, 接地刚度比$\alpha $也会影响系统的控制性能, 图2 中$\omega =0$处的$Z$点也与阻尼比无关. 为使幅频曲线的峰值最小, 可进一步将3个固定点$P$, $Q$和$Z$调整到同一高度, 于是令
(19) $\begin{eqnarray} \label{eq19} \left. {A^{2}} \right|_{\lambda =0} =\left. {A^{2}} \right|_{(\lambda_{P},\lambda_{Q} )} \end{eqnarray}$
(20) $\begin{eqnarray} \label{eq20} && [\mu +\left( {1+\alpha } \right)\beta \left( {1+\mu } \right)+\alpha \mu \left( {2+\mu } \right) ]^{2}\big/[ \beta +\mu +\beta \mu +\\&&\qquad 2\alpha \beta \left( {1+\mu } \right)+\alpha \mu \left( {3+\mu } \right) +\alpha^{2}\left( {-1+\beta +\beta \mu } \right)]^{2} =\\&&\qquad \dfrac{2\beta \left( {1+\mu } \right)+\mu \left( {2+\mu } \right)}{\left( {\alpha -\mu } \right)^{2}} \end{eqnarray}$
(21a) $\begin{aligned}\alpha_{1,2}=&[-2 \beta(1+\mu)-\mu(3+\mu) \pm(1+\mu) \cdot\\&\sqrt{2 \beta(1+\mu)+\mu(2+\mu)}] / \\&[-1+2 \beta(1+\mu)+\mu(2+\mu)]\end{aligned}$
(21b) $\begin{aligned}\alpha_{3,4}=&[\beta(1+\mu)+\mu(2+\mu) \pm(1+\mu) \cdot\\&\sqrt{2 \beta(1+\mu)+\mu(2+\mu)}] / \\&[2+\mu-\beta(1+\mu)]\end{aligned}$
经计算可知, 当惯容比取不恰当的值时, 上述4个可能的最优解均会引起系统失稳, 故推知在动力吸振器的最优设计过程中, 在保证系统稳定性的前提下, 惯容存在最佳工作范围. 现有惯容元件的惯容系数均为正且质量比为正, 由式(17)、式(18)和式(21)表达式易知式中根号下部分均大于0, 故现将上述每个刚度比分别代入式(16)中并令其大于0求解惯容比$\beta $, 可初步得到每个可能最优刚度比所对应的惯容工作范围. 进而将上述求得的刚度比分别代入式(8)中, 在满足各自对应的惯容工作范围内, 发现只有$\alpha_{3} $能保证系统的固有频率均为正值, 所以本文模型的最优接地刚度比为$\alpha_{3} $, 即
(22) $\begin{eqnarray} \label{eq22} &&\alpha_{{\rm opt}} =\alpha_{3} =\Big[\beta \left( {1+\mu } \right)+\mu \left( {2+\mu } \right) + \left( {1+\mu } \right)\cdot \\&&\qquad\sqrt {2\beta \left( {1+\mu } \right)+\mu \left( {2+\mu } \right)}\Big]\Big/[{2+\mu -\beta \left( {1+\mu } \right)}]\qquad \end{eqnarray}$
至此, 已经得到了最优频率比与最优接地刚度比, 固定点$P$和$Q$已经被调整到同一高度. 由于$P$和$Q$两固定点的坐标与阻尼比$\xi $的取值无关, 为了达到最优的减振效果, 须使两固定点成为位移幅频曲线的最高点或近似最高点. 由极值条件可知, 幅频曲线在两固定点处的导数为零, 即
(23) $\begin{eqnarray} \dfrac{\partial A^{2}}{\partial \lambda_{P}^{2}}=0,\ \ \dfrac{\partial A^{2}}{\partial \lambda_{Q}^{2}}=0 \end{eqnarray}$
由式(23)可以得到使$P$和$Q$两固定点成为或近似成为幅频曲线最高点时$\xi_{1} $和$\xi_{2} $的值, 进而得到最优阻尼比$\xi_{{\rm opt}} =\left( {\xi_{1} +\xi_{2} } \right)/2$, 但是这种方法有时难以得到解析结果. 因此使用文献[4 ]中的方法求出阻尼比的近似值.
为了使幅频曲线水平通过$P$点, 先假设其通过邻近点$P'$, $P'$点的坐标为$\left( \lambda_{P'}, A_{P'}\right)$, 令
(24) $\begin{eqnarray} \left. {\begin{array}{l} \lambda_{P'}^{2} =\lambda_{P}^{2} +\delta \\ A_{P'} =A=\dfrac{\sqrt {2\beta \left( {1+\mu } \right)+\mu \left( {2+\mu } \right)} }{\alpha -\mu } \\ \end{array}} \right\} \end{eqnarray}$
将式(24)代入式(6)可得到关于$\xi_{1}^{2} $的表达式
(25) $\begin{eqnarray} \xi_{1}^{2} =-\dfrac{\left( {a+b+c} \right)\left( {d+e+g} \right)}{h} \end{eqnarray}$
(26) $\begin{eqnarray} \label{eq26} \left. {\begin{array}{l} a=\mu \Big\{ \left[ {-1+A_{P'} \left( {-1+\lambda_{P'}^{2} } \right)} \right]\left( {v^{2}-\lambda_{P'}^{2} } \right)+\\\qquad A_{p'} v^{2}\lambda _{P'}^{2} \mu \Big\} \\ b=\alpha \left[ {-1+A_{P'} \left( {-1+\lambda_{P'}^{2} +\beta \lambda _{P'}^{2} -v^{2}\mu } \right)} \right] \\ c=\beta \lambda_{P'}^{2} \left[ {1-A_{P'} \left( {-1+\lambda_{P'}^{2} +\lambda_{P'}^{2} \mu } \right)} \right] \\ d=\alpha +A_{P'} \alpha \left( {-1+\lambda_{P'}^{2} +\beta \lambda _{P'}^{2} -v^{2}\mu } \right) \\ e=\mu \Big\{ \left[ {1+A_{P'} \left( {-1+\lambda_{P'}^{2} } \right)} \right]\left( {v^{2}-\lambda_{P'}^{2} } \right)+\\\qquad A_{p'} v^{2}\lambda _{P'}^{2} \mu \Big\} \\ g=-\beta \lambda_{P'}^{2} \left[ {1+A_{P'} \left( {-1+\lambda_{P'}^{2} +\lambda_{P'}^{2} \mu } \right)} \right] \\ h=4v^{2}\lambda_{P'}^{2} \mu^{2}\left\{ {-1+A_{P'}^{2}\left[ {1+\alpha -\lambda_{P'}^{2} \left( {1+\mu } \right)} \right]^{2}} \right\} \\ \end{array}} \right\} \end{eqnarray}$
(27) $\begin{eqnarray} \xi_{1}^{2} =\dfrac{a_{0} +a_{1} \delta +a_{2} \delta^{2}+a_{3} \delta ^{3}+\cdots }{b_{0} +b_{1} \delta +b_{2} \delta^{2}+b_{3} \delta ^{3}+\cdots } \end{eqnarray}$
如果$\delta =0$, 式(25)为0/0形式的不定式, 于是得到 $a_{0} =b_{0} =0$. 由于$\delta $是一个非常小的量, 在式(27)中可以忽略其高次项, 此时的阻尼比为
(28) $\begin{eqnarray} \xi_{1}^{2} =\dfrac{a_{1} }{b_{1} } \end{eqnarray}$
因此只需要找到式(27)的分子与分母中所有$\delta $的一次项系数
(29) $\left.\begin{array}{rl}a_{1}= & 2\left\{-(\beta+\mu)\left(\alpha+v^{2} \mu\right)+(\beta+\mu)^{2} \lambda_{P}^{2}+\right. \\& A_{P}^{2}\left[\beta+\alpha(1+\beta)+\mu+v^{2} \mu(1+\mu)-\right. \\& \left.2(\beta+\mu+\beta \mu) \lambda_{P}^{2}\right]\left\{\alpha+v^{2}(1+\alpha) \mu-\right. \\& {\left[\beta+\alpha(1+\beta)+\mu+v^{2} \mu(1+\mu)\right] \lambda_{P}^{2}+} \\& \left.\left.(\beta+\mu+\beta \mu) \lambda_{P}^{4}\right\}\right\} \\b_{1}= & 4 v^{2} \mu^{2}\left\{-1+A_{P}^{2}\left[(1+\alpha)^{2}-4(1+\alpha)\right.\right. \\& \left.\left.(1+\mu) \lambda_{P}^{2}+3(1+\mu)^{2} \lambda_{P}^{4}\right]\right\}\end{array}\right\}$
将式(16)$\sim\!$式(18)及式(22)代入式(28), 得到使幅频曲线水平通过$P$点时的阻尼比
(30) $\begin{eqnarray} &&\xi_{1}^{2} =\dfrac{1}{4\varDelta }\Bigg\{ -\left( {\beta +\mu } \right)-\dfrac{\left( {-2+\varDelta } \right)\mu }{\left( {1+\mu } \right)\left[ {-1+2\beta \left( {1+\mu } \right)} \right]}\cdot\\&&\qquad \dfrac{\beta \{3\beta \left( {1+\varDelta -\mu } \right)\left( {1+\mu } \right)+ \mu \left[ 5-2\mu +2\varDelta \left( {1+\mu } \right) \right]\}}{\mu \left[ {-1+2\beta \left( {1+\mu } \right)} \right]}\Bigg\}\\ \end{eqnarray}$
(31) $\begin{eqnarray} &&\xi_{2}^{2} =\dfrac{1}{4\varDelta }\Bigg\{ -\left( {\beta +\mu } \right)-\dfrac{\mu \varDelta }{\left( {1+\mu } \right)\left[ {-1+2\beta \left( {1+\mu } \right)} \right]}+ \\&&\qquad \dfrac{\beta \left[ {\beta \left( {1+\varDelta -\mu } \right)\left( {1+\mu } \right)+\mu \left( {1+2\varDelta \mu } \right)} \right]}{\mu \left[ {-1+2\beta \left( {1+\mu } \right)} \right]} \Bigg\} \end{eqnarray}$
(32) $\begin{eqnarray} &&\xi_{_{{\rm opt}} }^{2} \cong \dfrac{\xi_{1}^{2} +\xi_{2}^{2} }{2}= \dfrac{1}{4}\Bigg\{ 1-\dfrac{\varDelta }{1+\mu }+\\&&\qquad\dfrac{\beta }{\mu }\left[ 1+\dfrac{1+\varDelta -\mu }{-1+2\beta \left( {1+\mu } \right)} \right]+\\&&\qquad \dfrac{1}{\left( {1+\mu } \right)\left[ {-1+2\beta \left( {1+\mu } \right)} \right]}\Bigg\} \end{eqnarray}$
$\begin{eqnarray*} \varDelta =\sqrt {2\beta \left( {1+\mu } \right)+\mu \left( {2+\mu } \right)} \end{eqnarray*}$
1.3 惯容最佳工作范围
在筛选最优接地刚度比$\alpha_{{\rm opt}} $时, 已经验证过其满足系统的固有频率大于0. 考虑各最优参数及其计算过程, 惯容的工作范围应同时满足各表达式分母不等于0, 根号下部分大于0, 最优频率比$v_{{\rm opt}} $和最优阻尼比$\xi_{\rm opt}^{2} $大于0.
将最优接地刚度比$\alpha_{{\rm opt}} $代入最优频率比$v_{{\rm opt}} $中可得
(33) $\begin{eqnarray} \label{eq33} &&v_{{\rm opt}}\bigg|_{\alpha =\alpha_{{\rm opt}} } =\dfrac{1}{\sqrt \mu \left( {1+\mu } \right)}\cdot \Bigg\{ \beta +\mu +\beta \mu +\\&&\qquad \dfrac{\left( {-1+\beta +\beta \mu } \right)\left[ {\left( {\beta +\varDelta } \right)\left( {1+\mu } \right)+\mu \left( {2+\mu } \right)} \right]}{2+\mu -\beta \left( {1+\mu } \right)} \Bigg\}^{1/2}\qquad \end{eqnarray}$
(34) $\begin{eqnarray} \label{eq34} \left.{\begin{array}{l} \left. {v_{{\rm opt}} } \right|_{\alpha =\alpha_{{\rm opt}} } >0 \\ 2\beta \left( {1+\mu } \right)+\mu \left( {2+\mu } \right)>0 \\ \mu >0 \\ \end{array}} \right\} \end{eqnarray}$
(35) $\begin{eqnarray} \label{eq35} \dfrac{1}{2+2\mu }<\beta <\dfrac{2+\mu }{1+\mu } \end{eqnarray}$
2 数值仿真
2.1 数值解与解析解对比
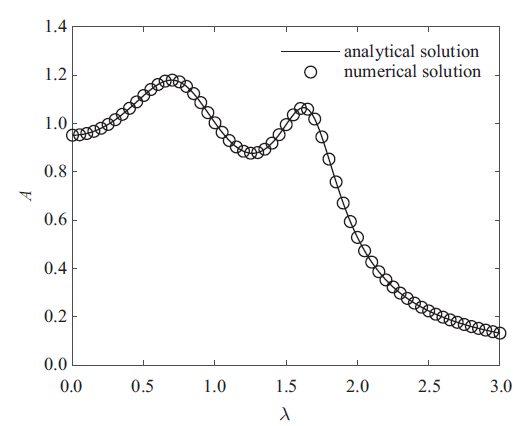
为了验证求解过程的正确性, 选取质量比$\mu =0.1$, 此时惯容最佳工作范围为$( 0.454\,5, 1.909\,1)$, 选取惯容比$\beta =0.5$, 激励幅值$F_{0} =1000$ N, 根据前面的优化结果得到最优参数分别为$\alpha =1.302\,6$, $v=0.726\,3$, $\xi =5.391\,6$. 使用四阶龙格库塔法, 选取计算时间为500 s, 可以得到在给定简谐激励下的数值解. 略去瞬态响应, 选取稳态解的最大值为响应幅值并进行归一化处理, 从而可以得到归一化的幅频曲线. 图3 给出了系统的解析解与数值解曲线, 黑色实线为系统的解析解, 黑色圆圈绘制的曲线为系统的数值解. 从图中可以看出, 解析解与数值解完全吻合, 验证了本文求解过程和各最优参数的正确性, 并且证实了最优参数的良好控制效果.
图3
图3
系统解析解与数值解对比
Fig.3
Comparison between the analytical solution and numerical solution of the system response
2.2 惯容对主系统响应的影响
2.2.1 最佳工作范围内惯容比对主系统振幅放大因子的影响
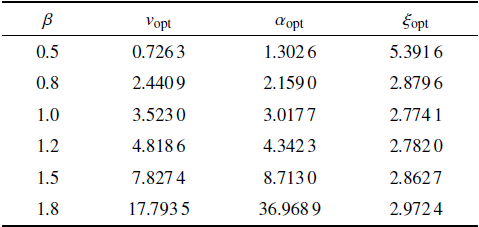
选取质量比$\mu =0.1$, 此时惯容最佳工作范围为$(0.454\,5, 1.909\,1)$. 进一步选取$\beta =0.5$, 0.8, 1.0, 1.2, 1.5, 1.8, 相应的系统最优参数值详见表1 , 并绘制幅频响应曲线如图4 . 由图4 可知, 在惯容最佳工作范围内, 惯容比$\beta $越大, 主系统归一化位移振幅放大因子越小, 两个纵坐标峰值高度越接近, 峰值对应的横坐标相隔越远. 即惯容系数越大, 系统共振区振幅越小, 减振频带越宽. 由表1 数据可知, 在惯容最佳工作范围内, 惯容比$\beta $越大, 系统最优频率比$v_{{\rm opt}} $越大, 最优刚度比$\alpha _{{\rm opt}} $越大, 最优阻尼比$\xi_{{\rm opt}} $先减小后增大; 且越接近惯容最佳范围上限, 理论最优频率比和刚度比增大的趋势越大.
图4
图4
惯容比对归一化位移振幅放大因子的影响
Fig.4
Comparison of the normalized amplitude magnification factors of the primary systems for different inerter-to-mass ratios
2.2.2 最佳工作范围外惯容比对主系统振幅放大因子的影响
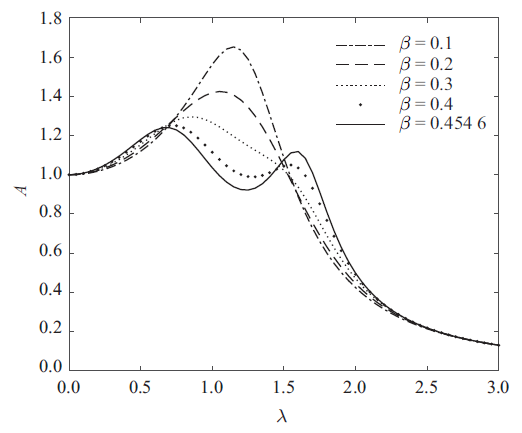
当惯容比取值为最佳工作范围外的值时, 使用前面的优化结果会得到不合理的最优值, 如负的频率、阻尼等, 因此这些优化结果便不再适用. 在工程实践中, 如因某些不可避免的因素导致惯容系数无法取最优范围内的数值, 可采取折中的设计. 当惯容比小于最佳工作范围时, 可按照惯容比略大于下限时对应的最优参数进行吸振器的设计和使用. 例如当质量比为$\mu =0.1$而惯容比分别为$\beta =0.1$, 0.2, 0.3, 0.4时, 均取略大于最佳范围下限的值$\beta =0.454\,6$. 此时对应的最优设计参数为$\alpha =1.200\,1$, $v=0.024\,4$, $\xi =144.351\,2$. 激励幅值取$F_{0} =1000$ N, 在Matlab软件中进行仿真模拟, 得到图5 . 由图5 可以观察到, 如此设计吸振器, 仍具有良好的减振效果.
图5
图5
惯容比小于最佳范围下限时主系统响应情况
Fig.5
Response of primary systems when the inerter-to-mass ratio is less than the lower limit of the optimal range
当惯容比大于最佳工作范围时, 质量比$\mu =0.1$, 略小于最佳范围上限的惯容比值$\beta =1.909\,0$, 对应的理想最优设计参数为$\alpha =46\,198.476\,2$, $v=648.048\,0$, $\xi =3.015\,1$. 显然此时接地弹簧刚度系数过大, 在实际应用中难以实现, 故应尽量避免惯容系数取值过大的情况.
3 与其他动力吸振器模型对比
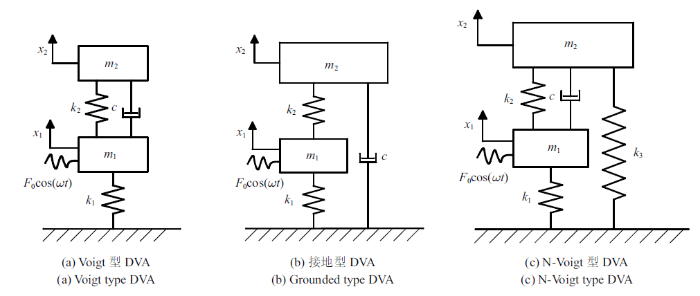
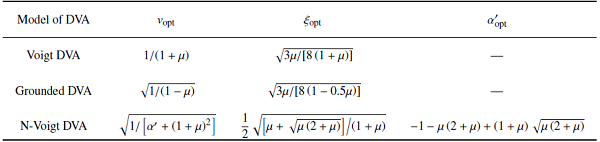
为验证本文提出的动力吸振器模型的减振效果, 将该模型(后文称之为IG-Voigt模型)与经典Voigt型动力吸振器、接地型动力吸振器[2 -4 ] 及文献[13 ]中附加负 刚度元件的Voigt型动力吸振器(后文称之为N-Voigt模型)进行了对比, 3种对比吸振器模型如图6 所示, 各模型对应的最优参数公式详见表2 .
图6
图6
现有动力吸振器模型
Fig.6
Existing models of dynamic vibration absorbers
3.1 简谐激励下的响应对比
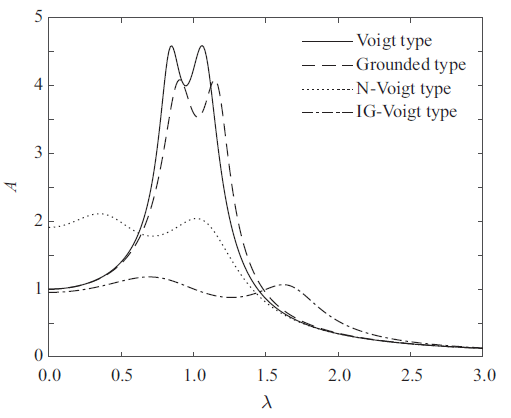
工程中很多设备尤其是旋转机械经常受到简谐激励, 因此首先比较不同激励频率下各模型的减振效果. 各模型均取质量比$\mu =0.1$, 本文模型惯容比取$\beta =0.5$, 并按照前面推出和表2 中已有的最优参数设计公式, 计算相关参数, 仿真不同频率简谐激励下主系统的位移响应, 得到各模型归一化位移幅频曲线如图7 所示.
图7
图7
与其他形式吸振器模型对比
Fig.7
Comparison with other DVA models
从图7 中可以看出, 在质量比相同的情况下, 本文模型相对于其他类型的动力吸振器可大幅降低主系统振幅, 并且产生的两个共振峰值的间距更大, 峰谷也更低, 从而同时拓宽了减振频带.
3.2 随机激励下的响应对比
在土木和建筑工程中系统所受的激励多为随机激励, 因此本文进一步研究了宽频随机噪声激励下的主系统响应情况. 设主系统受到均值为零、功率谱密度为$S(\omega )=S_{0} $的白噪声激励, 则前述4种模型主系统位移响应的功率谱密度函数分别为
(36) $\begin{eqnarray} \left.{\begin{array}{l} S_{{\rm V}} (\omega )=\left| {X_{{\rm V}_{1} } } \right|^{2}S_{0},S_{{\rm R}} (\omega )=\left| {X_{{\rm R}_{1} } } \right|^{2}S_{0} \\[-4mm] S_{{\rm N}} (\omega )=\left| {X_{{\rm N}_{1} } } \right|^{2}S_{0},S_{{\rm IG}} (\omega )=\left| {X_{{\rm IG1}} } \right|^{2}S_{0} \\ \end{array}} \right\} \end{eqnarray}$
其中下标V, R, N, IG分别代表Voigt式动力吸振器模型、接地型动力吸振器模型、N-Voigt型动力吸振器模型以及本文模型. 这4种动力吸振器模型的主系统位移均方值为
(37) $\left.\begin{array}{rl}\sigma_{\mathrm{V}}^{2}= & \int_{-\infty}^{\infty} S_{\mathrm{V}}(\omega) \mathrm{d} \omega=S_{0} \int_{-\infty}^{\infty}\left|X_{\mathrm{V}_{1}}\right|^{2} \mathrm{~d} \omega=\frac{\pi S_{0} Y_{1}}{2 \omega_{1}^{3} \mu \xi_{1}} \\ & \sigma_{\mathrm{R}}^{2}= \int_{-\infty}^{\infty} S_{\mathrm{R}}(\omega) \mathrm{d} \omega=S_{0} \int_{-\infty}^{\infty}\left|X_{\mathrm{R}_{1}}\right|^{2} \mathrm{~d} \omega=\frac{\pi S_{0} Y_{2}}{2 \omega_{1}^{3} \mu \xi v^{5}} \\ & \sigma_{\mathrm{N}}^{2}=\int_{-\infty}^{\infty} S_{\mathrm{N}}(\omega) \mathrm{d} \omega=S_{0} \int_{-\infty}^{\infty}\left|X_{\mathrm{N}_{1}}\right|^{2} \mathrm{~d} \omega= \\& \frac{\pi S_{0} Y_{3}}{2 \omega_{1}^{3} \mu \xi v\left(-1+v^{2} \alpha^{\prime}\right)^{2}\left(1+\alpha^{\prime}+v^{2} \alpha^{\prime} \mu\right)} \\ & \sigma_{\mathrm{IG}}^{2}=\int_{-\infty}^{\infty} S_{\mathrm{IG}}(\omega) \mathrm{d} \omega=S_{0} \int_{-\infty}^{\infty}\left|X_{\mathrm{IG}_{1}}\right|^{2} \mathrm{~d} \omega= \\ & \frac{\pi S_{0} Y_{4}}{2 \omega_{1}^{3} \mu \xi v(\alpha-\mu)^{2}\left[\alpha+v^{2}(1+\alpha) \mu\right]}\end{array}\right\}$
(38) $\begin{eqnarray} \left. {\begin{array}{l} Y_{1} =1+v^{4}\left( {1+\mu } \right)^{2}+v^{2}\left[ {-2-\mu +4\xi^{2}\left( {1+\mu } \right)} \right] \\[-1mm] Y_{2} =1+v^{4}+v^{2}\left( {-2+4\xi^{2}+\mu } \right) \\[-1mm] Y_{3} =\left( {1+{\alpha }'} \right)\left\{ {\left[ {-1+v^{2}\left( {1+{\alpha }'} \right)} \right]^{2}+4v^{2}\xi^{2}} \right\}+\\[-1mm]\qquad v^{4}\mu^{2}\left( {1+4{\alpha }'\xi^{2}} \right)+v^{2}\mu [-1+4\left( {1+{\alpha }'} \right)\xi^{2}+\\[-1mm]\qquad \lt.2v^{2}\left( {1+{\alpha }'+2{\alpha }'\xi^{2}} \right)] \\[-1mm] Y_{4} =\alpha^{3}+\alpha^{2}\Big\{ \left( {-2+\beta } \right)\beta +\Big\{ -2+v^{2}[ 3+\\[-1mm]\qquad \left( {-2+\beta } \right)\beta ] \Big\}\mu \Big\}+ v^{2}\mu \Big\{ \beta^{2}-2\beta \mu \Big[ -1+\\[-1mm]\qquad v^{2}\left( {1+\mu } \right) \Big] \Big\}+ \mu^{2}\Big\{ 1+v^{4}\left( {1+\mu } \right)^{2}+\\[-1mm]\qquad v^{2}\left[ {-2-\mu +4\xi^{2}\left( {1+\mu } \right)} \right] \Big\}+\\[-1mm]\qquad \alpha \Big\{ \beta^{2}\left( {1+2v^{2}\mu } \right)- 2\beta \mu \Big[ -1+2v^{2}+\\[-1mm]\qquad v^{4}\mu \left( {1+\mu } \right) \Big] \Big\}+ \mu^{2}+\Big\{ 1+ 4v^{2}\Big[ -1+ \\[-1mm]\qquad \xi^{2}\left( {1+\mu } \right)\Big]\Big\}+ v^{4}\left[ {3+2\mu +4\xi^{2}\mu \left( {1+\mu } \right)} \right] \\[-1mm] \end{array}} \right\} \end{eqnarray}$
假设4种动力吸振器中质量比均取$\mu =0.1$, 本模型惯容比取$\beta =0.5$, 根据相应优化公式得到各自的均方值分别为
(39) $\begin{eqnarray} \left. {\begin{array}{l} \sigma_{{\rm V}}^{2} =\dfrac{6.401\pi S_{0} }{\omega_{1}^{3} },\ \ \sigma_{{\rm R}}^{2} =\dfrac{5.780\pi S_{0} }{\omega_{1}^{3} } \\[2mm] \sigma_{{\rm N}}^{2} =\dfrac{3.302\pi S_{0} }{\omega_{1}^{3} },\ \ \sigma_{{\rm IG}}^{2} =\dfrac{1.316\pi S_{0} }{\omega_{1}^{3} } \\ \end{array}} \right\} \end{eqnarray}$
结果表明, 当初始参数相同时, 在随机激励情况下本文模型仍具有良好的减振效果.
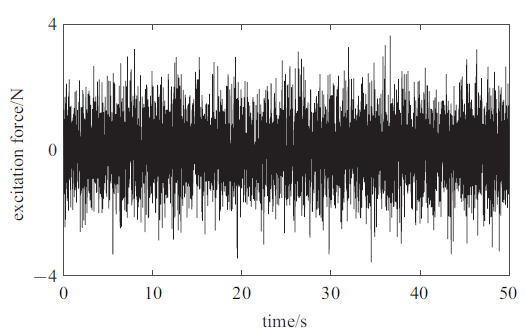
为了更真实地模拟工程实际, 本文构建了50 s均值为0、方差为1的随机激励, 其时间历程如图8 所示. 由于系统振动能量可由主系统位移方差衡量, 选取主系统质量$m_{1} =1$ kg, 主系统刚度$k_{1} =100$ N/m, 在表3 中总结了主系统位移方差及其衰减比.
图8
图8
随机激励时间历程
Fig.8
Time history of the random excitation
由表3 可以看出, 虽然已有模型和本文模型都是依据$H_{\infty }$优化准则进行设计的, 但是本文模型仍然能够在整个频率范围内大幅降低主系统的振动能量, 比其他3种模型具有更良好的减振性能.
4 结论
提出了一种含惯容和接地刚度的动力吸振器模型, 对该模型进行了参数优化, 得到了最优频率比、最优刚度比和近似最优阻尼比. 发现惯容和接地刚度共同作用时, 在最优设计过程中, 不恰当的惯容系数会使系统出现失稳现象, 由此得到了惯容的最佳工作范围. 分析了惯容比取其最佳工作范围内外值时吸振器的减振效果, 为实际生产中设计新型吸振器提供参考. 通过与其它类型的动力吸振器对比, 说明了合理惯容和接地刚度的引入能够大幅降低主系统振幅, 拓宽减振频率, 带来良好的减振效果.
参考文献
View Option
[1]
Frahm H . Device for damping vibrations of bodies
U.S. Patent 089958 1909 -10-30
[本文引用: 1]
[2]
Ormondroyd J Den Hartog JP . The theory of the dynamic vibration absorber
Journal of Applied Mechanics 1928 ,50 :9 -22
[本文引用: 2]
[3]
Den Hartog JP . Mechanical Vibrations
New York: McGraw-Hall Book Company , 1947 : 112 -132
[本文引用: 1]
[4]
Liu KF Liu J . The damped dynamic vibration absorbers: Revisited and new result
Journal of Sound and Vibration 2005 ,284 (3 ):1181 -1189
DOI
URL
[本文引用: 3]
[5]
Shen YJ Wang L Yang SP , et al . Nonlinear dynamical analysis and parameters optimization of four semi-active on-off dynamic vibration absorbers
Journal of Vibration and Control 2013 ,19 (1 ):143 -160
DOI
URL
[本文引用: 1]
[6]
Shen YJ Ahmadian M . Nonlinear dynamical analysis on four semiactive dynamic vibration absorbers with time delay
Shock and Vibration 2013 ,20 (4 ):649 -663
DOI
URL
[7]
郎君 , 申永军 , 杨绍普 . 一种半主动动力吸振器参数优化及性能比较
振动与冲击 , 2019 ,38 (17 ):172 -177
[本文引用: 1]
(Lang Jun Shen Yongjun Yang Shaopu . Parametric optimization and performance comparison for 2 semi-active Voigt DVAs
Journal of Vibration and Shock 2019 ,38 (17 ):172 -177 (in Chinese))
[本文引用: 1]
[8]
邢子康 , 申永军 , 李向红 . 接地式三要素型动力吸振器性能分析
力学学报 , 2019 ,51 (5 ):1466 -1475
[本文引用: 1]
(Xing Zikang Shen Yongjun Li Xianghong . Performance analysis of grounded three-element dynamic vibration absorber
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (5 ):1466 -1475 (in Chinese))
[本文引用: 1]
[9]
李涵 , 张小龙 , 张凯 等 . 随机激励下新型滚珠式吸振器的参数最优设计
噪声与振动控制 , 2020 ,40 (6 ):41 -45, 72
[本文引用: 1]
(Li Han Zhang Xiaolong Zhang Kai , et al . Optimal parameters design of a ball type dynamic vibration absorber under random excitation
Noise and Vibration Control 2020 ,40 (6 ):41 -45, 72 (in Chinese))
[本文引用: 1]
[10]
白世鹏 , 侯之超 . 动力吸振器对车辆垂向振动能量及悬架性能的影响
振动与冲击 , 2020 ,39 (22 ):169 -174
[本文引用: 1]
(Bai Shipeng Hou Zhichao . Impact of dynamic vibration absorbers on vehicle vertical vibration energy and suspension performances
Journal of Vibration and Shock 2020 ,39 (22 ):169 -174 (in Chinese))
[本文引用: 1]
[11]
张卫华 , 罗仁 , 宋春元 等 . 基于电机动力吸振的高速列车蛇行运动控制
交通运输工程学报 , 2020 ,20 (5 ):125 -134
[本文引用: 1]
(Zhang Weihua Luo Ren Song Chunyuan , et al . Hunting control of high-speed train using traction motor as dynamic absorber
Journal of Traffic and Transportation Engineering 2020 ,20 (5 ):125 -134 (in Chinese))
[本文引用: 1]
[12]
刘兴天 , 陈树海 , 王嘉登 等 . 几何非线性摩擦阻尼隔振系统动力学行为研究
力学学报 , 2019 ,51 (2 ):371 -379
[本文引用: 1]
(Liu Xingtian Chen Shuhai Wang Jiadeng , et al . Anlysis of the dynamic behavior and performance of a vibration isolation system with geometric nonlinear friction damping
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (2 ):371 -379 (in Chinese))
[本文引用: 1]
[13]
张婉洁 , 牛江川 , 申永军 等 . 一类阻尼控制半主动隔振系统的解析研究
力学学报 , 2020 ,52 (6 ):1743 -1754
[本文引用: 2]
(Zhang Wanjie Niu Jiangchuan Shen Yongjun , et al . Dynamical analysis on a kind of semi-active vibration isolation systems with damping control
Chinese Journal of Theoretical and Applied Mechanics 2020 ,52 (6 ):1743 -1754 (in Chinese))
[本文引用: 2]
[14]
Acar MA Yilmaz C . Design of an adaptive--passive dynamic vibration absorber composed of a string--mass system equipped with negative stiffness tension adjusting mechanism
Journal of Sound and Vibration 2013 ,332 (2 ):231 -245
DOI
URL
[本文引用: 1]
[15]
彭海波 , 申永军 , 杨绍普 . 一种含负刚度元件的新型动力吸振器的参数优化
力学学报 , 2015 ,47 (2 ):320 -327
[本文引用: 1]
(Peng Haibo Shen Yongjun Yang Shaopu . Parameter optimization of a new type of dynamic vibration absorber with negative stiffness
Chinese Journal of Theoretical and Applied Mechanics 2015 ,47 (2 ):320 -327 (in Chinese))
[本文引用: 1]
[16]
王孝然 , 申永军 , 杨绍普 等 . 含负刚度元件的三要素型动力吸振器的参数优化
振动工程学报 , 2017 ,30 (2 ):177 -184
(Wang Xiaoran Shen Yongjun Yang Shaopu , et al . Parameter optimization of three-element type dynamic vibration absorber with negative stiffness
Journal of Vibration Engineering 2017 ,30 (2 ):177 -184 (in Chinese))
[17]
Shen YJ Peng HB Li XH , et al . Analytically optimal parameters of dynamic vibration absorber with negative stiffness
Mechanical Systems and Signal Processing 2017 ,85 :192 -203
[18]
Shen YJ Xing ZY Yang SP , et al . Parameters optimization for a novel dynamic vibration absorber
Mechanical Systems and Signal Processing 2019 ,133 :106282
DOI
URL
[本文引用: 2]
[19]
邢昭阳 , 申永军 , 邢海军 等 . 一种含放大机构的负刚度动力吸振器的参数优化
力学学报 , 2019 ,51 (3 ):894 -903
[本文引用: 1]
(Xing Zhaoyang Shen Yongjun Xing Haijun , et al . Parameters optimization of a dynamic vibration absorber with amplifying mechanism and negative stiffness
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (3 ):894 -903 (in Chinese))
[本文引用: 1]
[20]
李昊 , 赵发刚 , 周徐斌 . 基于混杂双稳定层合板的准零刚度隔振装置
力学学报 , 2019 ,51 (2 ):354 -363
[本文引用: 1]
(Li Hao Zhao Fagang Zhou Xubin . A quasi-zero stiffness vibration isolator based on hybrid bistable composite laminate
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (2 ):354 -363 (in Chinese))
[本文引用: 1]
[21]
Zhou SY Claire JM Simon C , et al . Closed-form solutions to optimal parameters of dynamic vibration absorbers with negative stiffness under harmonic and transient excitation
International Journal of Mechanical Sciences , 2019 , 157-158 :528 -541
DOI
URL
[本文引用: 1]
[22]
Chen MZQ Hu Y Huang L , et al . Influence of inerter on natural frequencies of vibration systems
Journal of Sound & Vibration 2014 ,333 (7 ):1874 -1887
[本文引用: 1]
[23]
杨晓峰 , 沈钰杰 , 陈龙 等 . 基于动力吸振理论的车辆 ISD 悬架设计与性能分析
汽车工程 , 2014 ,36 (10 ):1262 -1266, 1277
[本文引用: 1]
(Yang Xiaofeng Shen Yujie Chen Long , et al . Design and performances analysis of vehicle ISD suspension based on dynamic vibration absorber theory
Automotive Engineering 2014 ,36 (10 ):1262 -1266, 1277 (in Chinese))
[本文引用: 1]
[24]
Hu Y Chen M ZQ . Performance evaluation for inerter-based dynamic vibration absorbers
International Journal of Mechanical Sciences 2015 ,99 :297 -307
DOI
URL
[本文引用: 1]
[25]
Hu Y Chen M ZQ Shu Z , et al . Analysis and optimisation for inerter-based isolators via fixed-point theory and algebraic solution
Journal of Sound and Vibration 2015 ,346 (1 ):17 -36
DOI
URL
[本文引用: 1]
[26]
Wang XR Liu XD Shan YC , et al . Analysis and optimization of the novel inerter-based dynamic vibration absorbers
IEEE Access 2018 ,6 :2844086
[本文引用: 1]
[27]
Wang XR He T Shen YJ , et al . Parameters optimization and performance evaluation for the novel inerter-based dynamic vibration absorbers with negative stiffness
Journal of Sound and Vibration 2019 ,463 :114941
DOI
URL
[本文引用: 1]
[28]
陈杰 , 孙维光 , 吴杨俊 等 . 基于惯容负刚度动力吸振器的梁响应最小化
振动与冲击 , 2020 ,39 (8 ):15 -22
[本文引用: 1]
(Chen Jie Sun Weiguang Wu Yangjun , et al . Minimization of beam response using inerter-based dynamic vibration absorber with negative stiffness
Journal of Vibration and Shock 2020 ,39 (8 ):15 -22 (in Chinese))
[本文引用: 1]
[29]
Gioacchino A Giuseppe F . Improved inerter-based vibration absorbers
International Journal of Mechanical Sciences 2021 ,192 :106087
DOI
URL
[本文引用: 1]
[30]
王勇 , 汪若尘 , 孟浩东 等 . 基于相对加速度-相对速度控制的半主动惯容隔振器动态特性研究
振动与冲击 , 2019 ,38 (21 ):194 -201, 228
[本文引用: 1]
(Wang Yong Wang Ruochen Meng Haodong , et al . Dynamic characteristics of semi active inerter-based vibration isolator with relative acceleration-relative velocity control
Journal of Vibration and Shock 2019 ,38 (21 ):194 -201, 228 (in Chinese))
[本文引用: 1]
Device for damping vibrations of bodies
1
1909
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
The theory of the dynamic vibration absorber
2
1928
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
... 为验证本文提出的动力吸振器模型的减振效果, 将该模型(后文称之为IG-Voigt模型)与经典Voigt型动力吸振器、接地型动力吸振器[2 -4 ] 及文献[13 ]中附加负 刚度元件的Voigt型动力吸振器(后文称之为N-Voigt模型)进行了对比, 3种对比吸振器模型如图6 所示, 各模型对应的最优参数公式详见表2 . ...
Mechanical Vibrations
1
1947
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
The damped dynamic vibration absorbers: Revisited and new result
3
2005
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
... 由式(23)可以得到使$P$和$Q$两固定点成为或近似成为幅频曲线最高点时$\xi_{1} $和$\xi_{2} $的值, 进而得到最优阻尼比$\xi_{{\rm opt}} =\left( {\xi_{1} +\xi_{2} } \right)/2$, 但是这种方法有时难以得到解析结果. 因此使用文献[4 ]中的方法求出阻尼比的近似值. ...
... 为验证本文提出的动力吸振器模型的减振效果, 将该模型(后文称之为IG-Voigt模型)与经典Voigt型动力吸振器、接地型动力吸振器[2 -4 ] 及文献[13 ]中附加负 刚度元件的Voigt型动力吸振器(后文称之为N-Voigt模型)进行了对比, 3种对比吸振器模型如图6 所示, 各模型对应的最优参数公式详见表2 . ...
Nonlinear dynamical analysis and parameters optimization of four semi-active on-off dynamic vibration absorbers
1
2013
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
Nonlinear dynamical analysis on four semiactive dynamic vibration absorbers with time delay
0
2013
一种半主动动力吸振器参数优化及性能比较
1
2019
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
一种半主动动力吸振器参数优化及性能比较
1
2019
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
接地式三要素型动力吸振器性能分析
1
2019
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
接地式三要素型动力吸振器性能分析
1
2019
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
随机激励下新型滚珠式吸振器的参数最优设计
1
2020
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
随机激励下新型滚珠式吸振器的参数最优设计
1
2020
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
动力吸振器对车辆垂向振动能量及悬架性能的影响
1
2020
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
动力吸振器对车辆垂向振动能量及悬架性能的影响
1
2020
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
基于电机动力吸振的高速列车蛇行运动控制
1
2020
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
基于电机动力吸振的高速列车蛇行运动控制
1
2020
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
几何非线性摩擦阻尼隔振系统动力学行为研究
1
2019
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
几何非线性摩擦阻尼隔振系统动力学行为研究
1
2019
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
一类阻尼控制半主动隔振系统的解析研究
2
2020
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
... 为验证本文提出的动力吸振器模型的减振效果, 将该模型(后文称之为IG-Voigt模型)与经典Voigt型动力吸振器、接地型动力吸振器[2 -4 ] 及文献[13 ]中附加负 刚度元件的Voigt型动力吸振器(后文称之为N-Voigt模型)进行了对比, 3种对比吸振器模型如图6 所示, 各模型对应的最优参数公式详见表2 . ...
一类阻尼控制半主动隔振系统的解析研究
2
2020
... 动力吸振器(dynamic vibration absorber, DVA)是一种通过附加在主系统上的控制结构吸收主系统的振动能量, 降低主振动系统振动的装置. Frahm[1 ] 于1909年发明了世界上第一种动力吸振器, 这种最初的DVA为无阻尼吸振器, 其减振频带有限, 亦称为窄带吸振器. Ormondroyd等[2 -3 ] 在无阻尼DVA中加入阻尼设计出减振效果更好、适用范围更广的Voigt式DVA, 首次提出了固定点理论, 并在专著中整理汇总了DVA最优参数的设计方法. Liu等[4 ] 设计了一种接地式DVA并计算了相应的最优参数. 申永军等[5 -7 ] 设计了多种半主动on-off控制DVA, 通过平均法进行了参数优化和控制效果比较, 并分析了时滞特性对半主动控制的影响. 邢子康等[8 ] 设计出一种新型接地式三要素型动力吸振器, 发现系统存在局部最优参数并分析了其性能. 李涵等[9 ] 利用H$_{2}$优化原理对随机激励下的新型滚珠式动力吸振器进行了参数最优设计. 白世鹏等[10 ] 研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响. 张卫华等[11 ] 采用牵引电机作为动力吸振器来控制转向架蛇行运动稳定性和蛇行频率, 从而避免引起车体弹性模态共振. 刘兴天等[12 ] 提出了一种几何非线性摩擦阻尼模型用于分析隔振系统的动力学特性. 张婉洁等[13 ] 研究了3种基于相对速度反馈的含立方刚度的单自由度非线性半主动隔振系统, 通过平均法得到了其主共振响应的近似解析解. ...
... 为验证本文提出的动力吸振器模型的减振效果, 将该模型(后文称之为IG-Voigt模型)与经典Voigt型动力吸振器、接地型动力吸振器[2 -4 ] 及文献[13 ]中附加负 刚度元件的Voigt型动力吸振器(后文称之为N-Voigt模型)进行了对比, 3种对比吸振器模型如图6 所示, 各模型对应的最优参数公式详见表2 . ...
Design of an adaptive--passive dynamic vibration absorber composed of a string--mass system equipped with negative stiffness tension adjusting mechanism
1
2013
... 负刚度元件因其承载能力大、变形小、可控性好的优点, 近年来被广泛应用于系统减振之中. Acar等[14 ] 提出了可以有效降低主系统振幅的含负刚度无阻尼DVA. 申永军等[15 -18 ] 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化. ...
一种含负刚度元件的新型动力吸振器的参数优化
1
2015
... 负刚度元件因其承载能力大、变形小、可控性好的优点, 近年来被广泛应用于系统减振之中. Acar等[14 ] 提出了可以有效降低主系统振幅的含负刚度无阻尼DVA. 申永军等[15 -18 ] 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化. ...
一种含负刚度元件的新型动力吸振器的参数优化
1
2015
... 负刚度元件因其承载能力大、变形小、可控性好的优点, 近年来被广泛应用于系统减振之中. Acar等[14 ] 提出了可以有效降低主系统振幅的含负刚度无阻尼DVA. 申永军等[15 -18 ] 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化. ...
含负刚度元件的三要素型动力吸振器的参数优化
0
2017
含负刚度元件的三要素型动力吸振器的参数优化
0
2017
Analytically optimal parameters of dynamic vibration absorber with negative stiffness
0
2017
Parameters optimization for a novel dynamic vibration absorber
2
2019
... 负刚度元件因其承载能力大、变形小、可控性好的优点, 近年来被广泛应用于系统减振之中. Acar等[14 ] 提出了可以有效降低主系统振幅的含负刚度无阻尼DVA. 申永军等[15 -18 ] 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化. ...
... 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化. ...
一种含放大机构的负刚度动力吸振器的参数优化
1
2019
... 负刚度元件因其承载能力大、变形小、可控性好的优点, 近年来被广泛应用于系统减振之中. Acar等[14 ] 提出了可以有效降低主系统振幅的含负刚度无阻尼DVA. 申永军等[15 -18 ] 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化. ...
一种含放大机构的负刚度动力吸振器的参数优化
1
2019
... 负刚度元件因其承载能力大、变形小、可控性好的优点, 近年来被广泛应用于系统减振之中. Acar等[14 ] 提出了可以有效降低主系统振幅的含负刚度无阻尼DVA. 申永军等[15 -18 ] 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化. ...
基于混杂双稳定层合板的准零刚度隔振装置
1
2019
... 负刚度元件因其承载能力大、变形小、可控性好的优点, 近年来被广泛应用于系统减振之中. Acar等[14 ] 提出了可以有效降低主系统振幅的含负刚度无阻尼DVA. 申永军等[15 -18 ] 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化. ...
基于混杂双稳定层合板的准零刚度隔振装置
1
2019
... 负刚度元件因其承载能力大、变形小、可控性好的优点, 近年来被广泛应用于系统减振之中. Acar等[14 ] 提出了可以有效降低主系统振幅的含负刚度无阻尼DVA. 申永军等[15 -18 ] 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化. ...
Closed-form solutions to optimal parameters of dynamic vibration absorbers with negative stiffness under harmonic and transient excitation
1
2019
... 负刚度元件因其承载能力大、变形小、可控性好的优点, 近年来被广泛应用于系统减振之中. Acar等[14 ] 提出了可以有效降低主系统振幅的含负刚度无阻尼DVA. 申永军等[15 -18 ] 将负刚度元件接地并应用到多种吸振器之中, 证明了含合理负刚度元件的吸振器有着良好的减振性能, 特别是文献[18 ]发现在放大比和质量比耦合项达到一定值后, 最优接地刚度比为正值且系统具有更好的吸振特性. 邢昭阳等[19 ] 将放大机构应用于含负刚度弹簧元件的动力吸振器模型, 对该模型的最优参数进行了研究. 李昊等[20 ] 提出了一种新型准零刚度隔振装置, 并对其隔振效果进行了仿真和试验分析. Zhou等[21 ] 提出了两种含负刚度元件的动力吸振器模型, 使用$H_{\infty }$准则和稳定性最大化准则进行了优化. ...
Influence of inerter on natural frequencies of vibration systems
1
2014
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
基于动力吸振理论的车辆 ISD 悬架设计与性能分析
1
2014
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
基于动力吸振理论的车辆 ISD 悬架设计与性能分析
1
2014
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
Performance evaluation for inerter-based dynamic vibration absorbers
1
2015
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
Analysis and optimisation for inerter-based isolators via fixed-point theory and algebraic solution
1
2015
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
Analysis and optimization of the novel inerter-based dynamic vibration absorbers
1
2018
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
Parameters optimization and performance evaluation for the novel inerter-based dynamic vibration absorbers with negative stiffness
1
2019
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
基于惯容负刚度动力吸振器的梁响应最小化
1
2020
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
基于惯容负刚度动力吸振器的梁响应最小化
1
2020
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
Improved inerter-based vibration absorbers
1
2021
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
基于相对加速度-相对速度控制的半主动惯容隔振器动态特性研究
1
2019
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...
基于相对加速度-相对速度控制的半主动惯容隔振器动态特性研究
1
2019
... 惯容是一种与两端点加速度相关的新型结构控制元件, 在减振控制领域有着较为广泛的应用. Chen等[22 ] 研究了惯容对隔振系统频率的影响. 杨晓峰等[23 ] 研究了含惯容的DVA与主系统的连接方法与耦合关系, 提出了车辆ISD悬架结构设计方法. Hu等[24 -25 ] 将惯容应用到隔振、吸振系统中, 证明了惯容有着良好的减振隔振特性. Wang等[26 -27 ] 设计了多种含惯容的动力吸振器并推导出其对应的最优参数设计公式. 陈杰等[28 ] 提出了两种用于抑制梁振动的含惯容和负刚度动力吸振器模型. Gioacchino等[29 ] 将菱形支架和惯容组合, 提出了一种改进的惯容式动力吸振器. 王勇等[30 ] 提出了一种相对加速度$\!-\!$相对速度控制策略调节的半主动惯容器, 并将其应用到隔振器中. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}