引言
变体飞行器是一种能够根据不同的飞行环境改变构型, 实现最佳的气动性能, 完成多种飞行任务的飞行器[1 ] . 作为变体飞行器的一种,折叠翼飞行器能够通过机翼的折叠改变自身构型[2 ] , 以不同的构型完成不同的飞行任务. 机翼折叠时, 翼面积、展长减小, 后掠角增大, 适合低空高速飞行, 机翼展开时, 翼面积和展长增大, 升阻比增大, 适合于高空长航时飞行, 节省能耗[3 ] .
作为一类新型飞行器, 折叠翼在带来优势的同时也带来了一些问题. 机翼的折叠所带来的额外自由度使得飞行器的动力学模型变得更加复杂, 而由变形引起的气动力与气动力矩、压心、质心和转动惯量等参数的变化以及附加力和附加力矩的产生都会给飞行器的稳定性和操纵性带来很大的影响[4 ] , 严重的甚至会失稳, 由此对飞行器的控制性能提出了更高的要求.
常用于建立折叠翼飞行器多刚体动力学模型的方法主要有3种: Newton-Euler方法、Lagrange方程、Kane方法.Yue等[5 ] 使用Newton-Euler方法建立了折叠翼变形飞行器的六自由度非线性动力学模型,并对其进行解耦, 研究了飞行器的纵向动力学响应. Grant等[6 ] 利用Newton-Euler建立了变后掠飞行器的动力学模型,并研究了飞行器的时变惯性效应.郭建国等[7 ] 利用Newton-Euler方法建立了非对称伸缩翼变形飞行器的动力学模型,并进行了动态特性分析. Seigler等[8 ] 使用Kane方法对建立了大型变形飞行器的六自由度非线性动力学模型.Obradovic等[9 ] 在考虑气动性能和惯性性能变化的情况系使用Kane方法建立了变形飞行器的六自由度非线性模型.Zhu等[10 ] 使用Kane方法建立了变跨度变掠飞行器的六自由度非线性动力学模型.张杰等[11 ] 利用Kane方法建立了变展长变后掠飞行器的六自由度动力学模型,并进行了动态特性分析.
针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制.
LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性.
本文针对折叠翼飞行器, 利用凯恩方法建立了六自由度多体非线性动力学模型, 通过气动计算拟合了气动参数与折叠角的函数关系并分析了机翼折叠过程中的动态特性.针对飞行器纵向非线性模型, 提出了一种基于自抗扰理论的稳定控制方法.此方法不需要对动力学模型进行小扰动线性化, 而是通过设计扩张状态观测器(ESO)将系统中存在的非线性项、耦合项以及参数时变项等内外总扰动进行实时估计和补偿,从而得到等效的线性模型, 通过设计线性控制器即可实现飞行器变形过程中的高精度稳定控制.
1 折叠翼飞行器的动力学建模
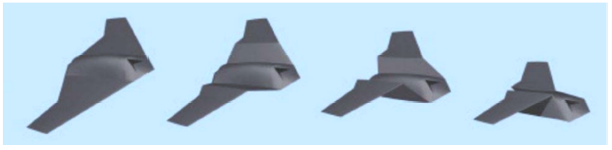
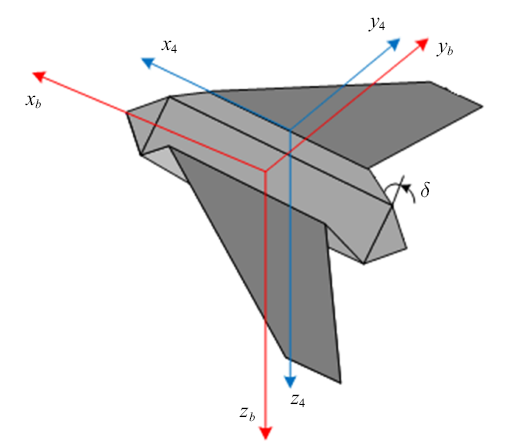
本文以轻型飞机Navion L-17[27 ] 作为研究对象, 基于kane方法建立折叠翼飞行器的动力学模型. 如图1 所示, 假设左右机翼质量相同, 几何形状完全对称, 将机翼分为内翼和外翼,折叠时, 内翼相对机体折叠, 外翼相对机体始终保持水平. 机翼对称折叠,左右内翼折叠角大小为$\delta $, 如图2 所示.
图1
图1
机翼折叠过程示意图
Fig. 1
Schematic of morphing process
图2
图2
飞行器坐标示意图
Fig. 2
Schematic of morphing aircraft coordinate
将机体看作主刚体, 折叠翼看作从刚体, 整个系统可看由5个独立刚体组成的多刚体系统[28 ] , 质量为$m_i$ $(i=$ b, 1, 2, 3, 4), 其中, b表示机体, $1$表示左折叠翼内翼, $2$表示左折叠翼外翼, $3$表示右折叠翼内翼, $4$表示右折叠翼外翼, 总质量为$m$.
(1)地面坐标系$f_{{g}-O_{g} x_{g} y_{g} z_{g} } $: 原点$O_{g} $为起飞点, $x_{g} $轴是航迹面与水平面的交线, 指向飞行目的地为正, $z_{g} $轴垂直于地平面, 向下指向地心, $y_{g}$轴与$x_{g} $轴和$z_{g} $轴构成右手坐标系.
(2)机体坐标系$f_{{b}-O_{b} x_{b} y_{b} z_{b} } $: 坐标原点取在机体质心, $x_{b}$轴位于飞机对称面内与飞机的轴线平行并指向机头方向, $y_{b} $轴垂直于机体对称面并指向右侧机翼, $z_{b}$轴在飞机对称面内, 与$x_{b} $轴垂直指向机身下方.
(3)折叠翼固连坐标系$f_{i-O_i x_i y_i z_i } $: 原点位于折叠翼旋转轴几何中心处, $x_i $轴与折叠翼的旋转轴重合,且与机体轴的$x_{b} $轴同向, $y_i $轴垂直于$x_i $轴并且位于折叠翼面内, 随翼面转动, $z_i $轴与$x_i $轴和$y_i$轴构成右手坐标系.
(4)气流坐标系$f_{{a}-Ox_{a} y_{a} z_{a} } $: 坐标原点取在飞机质心, $x_{a} $轴与飞机速度矢量的方向重合, $z_{a}$轴位于飞机对称面内并与$x_{a} $轴垂直指向机体下方, $y_{a}$轴与$x_{a} $轴和$z_{a} $轴构成右手坐标系.
刚体上取质量参考点d$m_i$, 根据各刚体的约束关系, 求取各刚体速度矢量${v}_i $和加速度矢量${a}_i $. 选取广义速率分别为机体的速度${v}_{b} $和角速度${\omega }_{b} $, 求取各刚体速度矢量相对于广义速率的偏速度分别为${v}_i ^{\left( {{v}_{b} } \right)}$和${v}_i ^{\left( {\omega _{b} } \right)}$.
根据Kane方法分别求取广义惯性力和广义主动力,由此得到机体系下的系统平动方程和转动方程分别为
(1) $m({\dot{{v}}}_{b} +{\omega }_{b} \times {v}_{b} )={F}-{F}_{S}$
(2) ${I\dot{{\omega }}}_{b} +{\omega }_{b} \times {I\omega }_{b} ={M}_{A} -{M}_{S}$
式中, ${v}_{b} $表示机体的速度在机体系下的分量列阵,在气流系下表示为${v}_b ^{(a)}=[ V \ \ 0 \ \ 0 ]^{T}$, 上标$a$表示气流系, $V$表示飞行速率; ${\omega}_{b} $表示机体系相对于地面系的角速度在机体系下的分量列阵, 记为${\omega }_{b} =[p \ \ q \ \ r ]^{T}$; ${F}$表示系统所受到的合外力在机体系下的分量列阵, 包括气动力、推力和重力; ${F}_{S} $表示机翼折叠带来的附加力在机体系下的分量列阵; ${I}$表示飞行器相对于$O_{b} $的转动惯量在$f_{b} $下的投影; ${M}_{A} $表示飞行器所受到的气动力矩在机体系下的分量列阵; ${M}_{S} $表示机体折叠带来的附加力矩在机体系下的分量列阵.
(3) $\begin{array}{F}_{S} =-\sum\limits_{i=1}^4 {{S}_{{b}i} ^\times } {\dot{{\omega }}}_{b} -{\omega }_{b} ^\times \left({\sum\limits_{i=1}^2 {m_i {r}_{{b}1} ^\times +\sum\limits_{i=3}^4 {m_i {r}_{{b}3} ^\times } } } \right){\omega }_{b} - \\ \sum\limits_{i=1}^4 {{A}_{{b}i} {S}_i ^\times { A}_{i{b}} {\omega }_{b} ^\times {A}_{{b}i} {\omega }_i } -\sum\limits_{i=1}^4 {{A}_{{b}i} {S}_{{b}i} ^\times } {\dot{{\omega }}}_i -\\ \sum\limits_{i=1}^4 {{A}_{{b}i} {\varOmega }_i ^\times {S}_i ^\times {\varOmega }_i } - m_{2} {A}_{{b1}} {r}_{{12}} ^\times {\dot{{\omega }}}_{1} -\\ m_{2} {A}_{{b1}} {r}_{12} ^\times { A}_{{1b}} {\omega }_{b} ^\times {A}_{{b1}} {\omega }_1 -m_2 {A}_{{b1}} {\varOmega }_1 ^\times {r}_{12} ^\times {\varOmega }_1 -\\ m_4 {A}_{{b3}} {r}_{34} ^\times {\dot{{\omega }}}_3 -m_4 {A}_{{b3}} {r}_{34} ^\times {A}_{{3b}} {\omega }_{b} ^\times {A}_{{b3}} {\omega }_3 -\\ m_4 { A}_{{b3}} {\varOmega }_3 ^\times {r}_{34} ^\times {\varOmega }_3\end{array}$
(4) $\begin{array}{M}_{S} =\sum\limits_{i=1}^4 {{S}_{{b}i} ^\times } { A}_{{bg}} {\ddot{{R}}}+\sum\limits_{i=1}^4 {{A}_{{b}i} {I}_i^{b} {A}_{i{b}} {\omega }_{b} ^\times { A}_{{b}i} {\omega }_i } - \\ \sum\limits_{i=1}^4 {{S}_{{b}i} ^\times {\omega }_{b} ^\times {r}_{{b}i} ^\times } {\omega }_{b} \!+\!\sum\limits_{i=1}^4 {{A}_{{b}i} \left( {{I}_{{\varOmega }_i } \!-\!{A}_{i{b}} {r}_{{b}i} ^\times {A}_{{b}i} {\varOmega }_i ^\times {r}_i ^\times } \right){\varOmega }_i }\!+\!\\ \sum\limits_{i=1}^4 {{A}_{{b}i} {I}_i^{b} {\dot{{\omega }}}_i } -{S}_{{b2}} ^\times {A}_{{b1}} { r}_{12} ^\times {\dot{{\omega }}}_1 -\\ {S}_{{b2}} ^\times { A}_{{b1}} {r}_{12} ^\times {A}_{{1b}} {\omega }_{b} ^\times {A}_{{b}1} {\omega }_1 - {S}_{{b2}} ^\times {A}_{{b1}} {\varOmega }_1 ^\times { r}_{12} ^\times {\varOmega }_1 -\\ {S}_{{b4}} ^\times { A}_{{b3}} {r}_{34} ^\times {A}_{{3b}} {\omega }_{b} ^\times {A}_{{b3}} {\omega }_3 - {S}_{{b4}} ^\times {A}_{{b3}} {\varOmega }_3 ^\times { r}_{34} ^\times {\varOmega }_3 -\\ {S}_{{b4}} ^\times { A}_{{b3}} {r}_{34} ^\times {\dot{{\omega }}}_3\end{array}$
式中, ${R}$, ${r}_{{b1}} $, ${r}_{{b3}} $, ${r}_{12} $和${r}_{34} $分别表示$O_{g} $到$O_{b}$的位置矢量在$f_{g} $下的分量列阵、$O_{b} $到$O_1 $和$O_3$的位置矢量在$f_{b} $下的分量列阵、$O_1 $到$O_2 $的位置矢量在$f_1$下的分量列阵、$O_3 $到$O_4 $的位置矢量在$f_3 $下的分量列阵;变量上".''表示在投影坐标系下求对时间求一阶导,变量上"..''表示在投影连坐标系下求对时间求二阶导, 上标"$\times$''表示变量的叉乘; ${A}_{ij} $表示$f_j $到$f_i $的转换矩阵; ${\varOmega}_i $和${\omega }_i $分别表示$f_i $相对于$f_{g} $的角速度在$f_i$下的分量列阵、$f_i $相对于$f_{b}$的角速度在$f_i $下的分量列阵; ${S}_i $, ${I}_i $和${I}_{{\varOmega }_i } $表示第$i$个机翼对$O_i$的静矩、转动惯量矩阵和拟惯量矩阵在$f_i $下的投影, 表示为
(5) ${S}_i =\int {{r}_i } \text{d}m$
(6) ${I}_i =-\int {{r}_i ^\times {r}_i ^\times \text{d}m}$
(7) ${I}_{{\varOmega }_i } =-\int {{r}_i ^\times {\varOmega }_i ^\times {r}_i ^\times \text{d}m}$
式中, ${r}_i $表示$f_i $原点到d$m_i $的位置矢量在$f_i $下的分量列阵.
${S}_{{b}i} $, ${I}_{{b}i} $和${I}_i^{b}$分别表示第$i$个机翼相对于$O_{b}$原点的静矩分量列阵、转动惯量矩阵和耦合转动惯量矩阵在$f_{b} $下的投影,表示为
(8) ${S}_{{b}i} =m_i {r}_{{b}i} +{A}_{{b}i} {S}_i$
(9) ${I}_{{b}i} =-\int {({r}_{{b}i} ^\times {+}{ A}_{{b}i} {r}_i ^\times {A}_{i{b}} )({r}_{{b}i} ^\times {+}{A}_{{b}i} {r}_i ^\times {A}_{i{b}} )\text{d}m}$
(10) ${I}_i^{b} ={I}_i -{A}_{i{b}} {r}_{{b}i} ^\times {A}_{{b}i} {S}_i ^\times$
式中, ${r}_{{b}i} $表示$O_{b} $到$O_i$的位置矢量在在$f_{b} $下的分量列阵; ${A}_{{b}i} $表示$f_i$到$f_{b} $的转换矩阵, 且有${A}_{i{b}} ={A}_{{b}i}^{T}$.
由于机翼折叠只改变飞行器的动力学方程, 并不改变飞行器的运动学方程和导航方程, 根据文献[29 ] 可得到飞行器的运动方程和导航方程, 此处不再赘述.
2 折叠翼飞行器的纵向运动方程
为了简化计算方程, 根据水平无侧滑条件即滚转角$\phi $、侧滑角$\beta $满足$\phi =\beta=0$与$p=r=0$将动力学方程进行解耦得到飞行器的纵向动力学方程, 以研究机翼折叠过程中纵向飞行参数的变化.
(11) $\left. {\begin{array}{l} \dot{{V}}=\dfrac{T}{m}\cos \alpha -g\sin (\theta -\alpha )-\dfrac{D}{m}+\dfrac{F_{{s1}} }{m} \\ \dot{{\alpha }}=-\dfrac{T}{mV}\sin \alpha -\dfrac{L}{mV}+\dfrac{g}{V}\cos (\theta -\alpha )+q+\dfrac{F_{{s}2} }{mV} \\ I_{{yy}} \dot{{q}}=M_{{Ay}} -M_{{Sy}} \\ \dot{{\theta }}=q \\ \dot{{h}}=V\cos \alpha \sin \theta -V\sin \alpha \cos \theta \\ \end{array}} \right\}$
式中, $\alpha $和$\theta $分别表示攻角和俯仰角; $h$表示飞行高度;$T$表示发动机推力, $T=k_{T} \delta _{T} $, $k_{T}$表示推力系数,$\delta _{T} $表示油门开度; $g$表示重力加速度; $I_{{yy}}$表示${I}$中绕$y_{b} $轴的主轴转动惯量; $F_{{s1}} $表示附加力在速度方向的分量、$F_{{s2}}$表示附加力在速度的垂直方向的分量; $M_{{Sy}} $表示附加力矩${M}_{S} $在机体系$y_{b} $轴下的分量; $L$, $D$和$M_{{Ay}}$分别表示升力、阻力和俯仰力矩, 其表达式为
(12) $\left. {\begin{array}{l} L=\dfrac{1}{2}\rho V^2S_{w} C_{L} \\ D=\dfrac{1}{2}\rho V^2S_{w} C_{D} \\ M_{{Ay}} =\dfrac{1}{2}\rho V^2S_{w} c_{A} C_{m} \\ \end{array}} \right\}$
式中, $\rho $表示空气密度 ; $S_{w} $表示机翼的参考面积; $c_{A}$表示平均气动弦长; $C_{L} $, $C_{D} $和$C_{m}$分别表示升力系数、阻力系数和俯仰力矩系数, 与攻角$\alpha $、舵偏角$\delta _{e}$之间的线性函数关系可近似表示为[30 ]
(13) $\left. {\begin{array}{l} C_{L} =C_{L0} +C_{L\alpha } \alpha +C_{L\delta _{e} } \cdot \delta _{e} \\ C_{D} =C_{D0} +C_{D\alpha } \cdot \alpha \\ C_{m} =C_{m0} +C_{m\alpha } \cdot \alpha +C_{m\delta _{e} } \cdot \delta _{e} \\ \end{array}} \right\}$
式中, $C_{L0} $, $C_{D0}$和$C_{m0} $分别表示基本升力系数、零升阻力系数、零升俯仰力矩系数; $C_{L\alpha }$和$C_{m\alpha } $分别表示升力系数和俯仰力矩系数对迎角的导数; $C_{L\delta _{e}}$和$C_{m\delta _{e}}$分别表示升力系数和俯仰力矩系数对舵偏角的导数.
3 折叠翼飞行器的气动建模与纵向动态特性分析
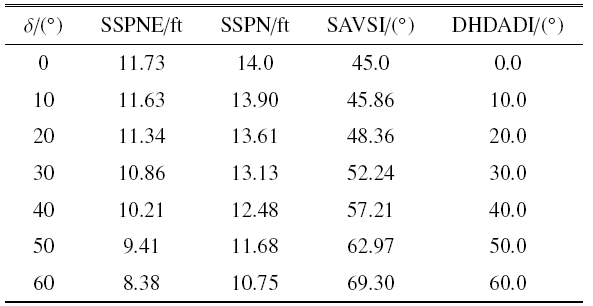
折叠翼飞行器在变形过程中, 其受到的气动力和力矩会随着折叠角变化而发生大幅变化[31 ] ,为了在后续控制器设计与数值仿真中准确模拟气动, 需要首先计算得到不同折叠角对应的气动数据并拟合出关于折叠角的函数.DATCOM软件能够利用飞行器的外形快速得到大量气动参数, 计算便捷, 适用于飞行器的理论验证阶段. 使用DATCOM软件,通过改变机身外的半翼展SSPNE、理论半翼展SSPN、内翼后掠角SAVSI和内翼上反角DHDADI来实现机翼的折叠[3 ] ,计算参数计算见表1 (表中 1 ft = 30.48 cm).
将表1 中的数据输入到DATCOM软件中, 可以得到相关的气动参数.利用MATLAB插值拟合可得到各气动参数与折叠角之间的函数关系
(14a) $\left. \begin{array}{l} C_{L0} \left( \delta \right)=-0.158 4\delta +0.469 26 \\ C_{{L}\alpha } \left( \delta \right)=-1.043\delta +3.843 \\ C_{{L}\delta_{e} } = 0.344 2 \\ \end{array} \right\}$
(14b) $\left. \begin{array}{l} C_{D0} \left( \delta \right)=-0.005 08 \delta +0.023 7 \\ C_{{D}\alpha} \left( \delta \right)=-0.045 25\delta +0.307 8 \\ C_{m0} \left( \delta \right)=-0.573 3\delta -0.043 67 \\ C_{{m}\alpha} \left( \delta \right)=0.134 4\delta -5.52 \\ C_{{M}\delta _{e} } = -0.878 7 \\ \end{array} \right\}$
式中, $\delta $表示折叠角. 将式(14)代入式(13),再将式(13)代入式(12)即可得到不同折叠角下升力、阻力和俯仰力矩.
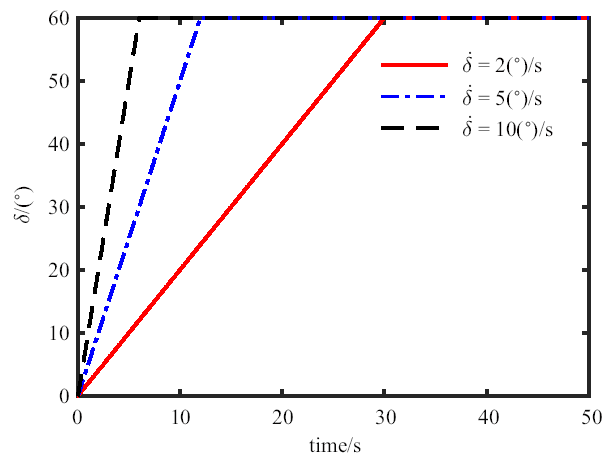
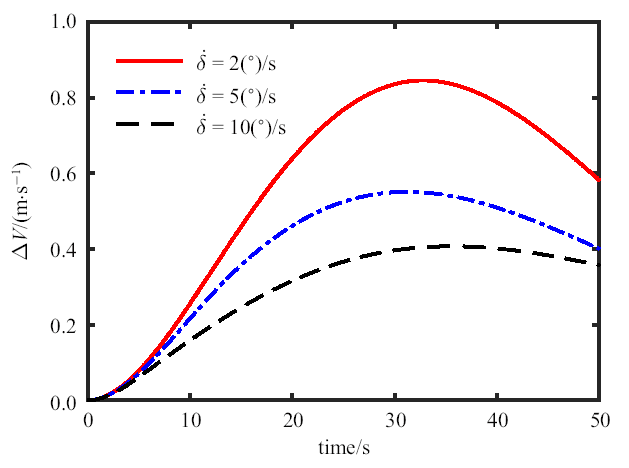
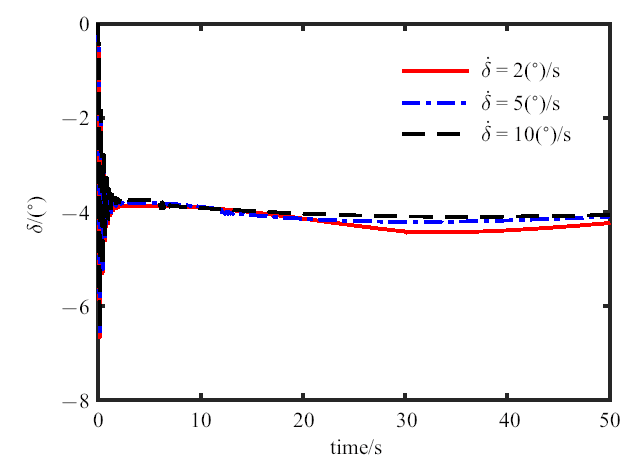
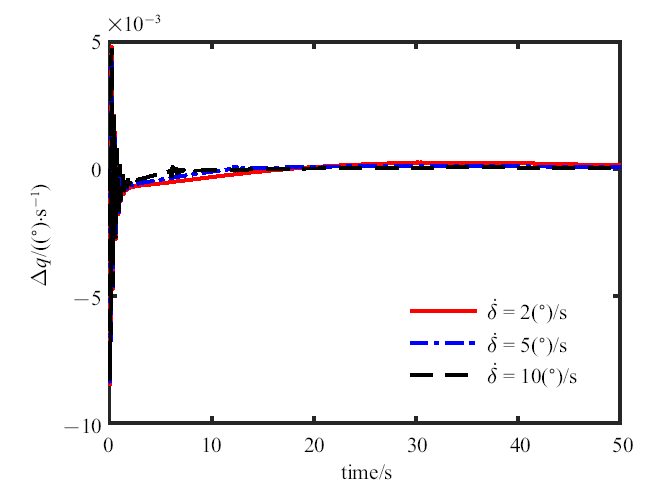
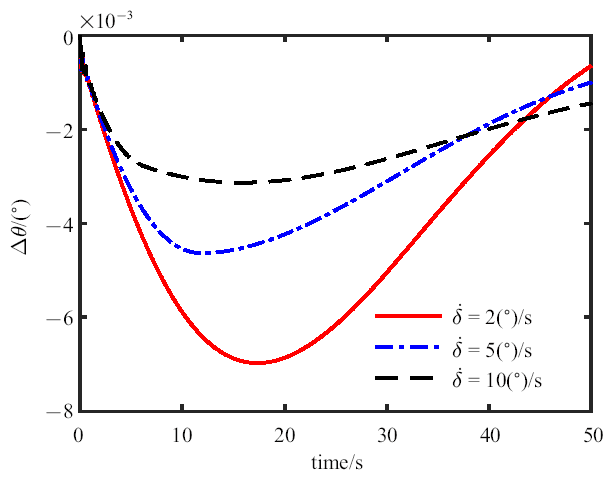
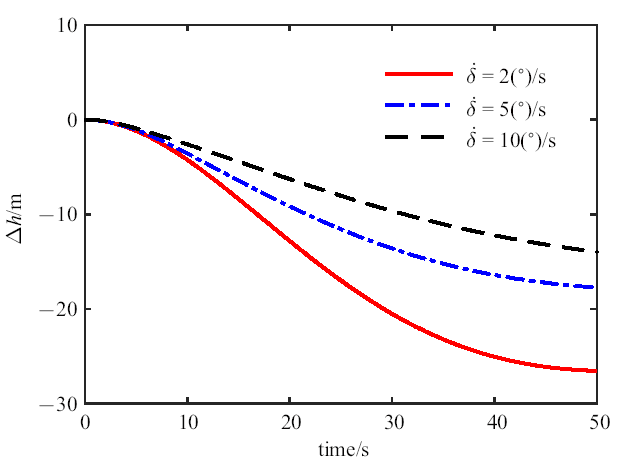
为了研究机翼折叠过程中飞行参数的变化, 对飞行器的纵向运动响应进行仿真[32 ] . 仿真初始条件为: 高度4000 m,速度0.4 Ma, 分别使机翼以$2(^{\circ}$)/s, $5(^{\circ}$)/s, $10(^{\circ}$)/s的折叠角速度折叠$60^\circ$, 研究纵向动力学状态变量在变形过程中的变化. 根据数值仿真, 可以得到飞行参数变化图如图3 ~图8 所示.
图3
图3
折叠角随时间的变化图
Fig. 3
Schematic of folding angle
图4
图4
速度增量变化图
Fig. 4
Schematic of speed increment
图5
图5
攻角增量变化图
Fig. 5
Schematic of angle of attack increment
图6
图6
俯仰角速度增量变化图
Fig. 6
Schematic of pitch angular velocity increment
图7
图7
俯仰角增量变化图
Fig. 7
Schematic of pitch angular increment
图8
图8
高度增量变化图
Fig. 8
Schematic of height increment
从图3 ~图8 中可以看出, 机翼刚开始折叠时, 俯仰角速度增量变为负值, 俯仰角减小,这是因为在刚开始折叠时, 飞机的升力面后移, 导致气动中心后移,从而产生了低头力矩. 随着折叠角的增大, 飞机的速度增大, 高度减小,这是因为折叠角增大时, 机翼的面积和展长变小, 从而导致升力减小,其在竖直方向的分量不足以平衡重力, 从而导致了高度的减小,同时推力大于阻力,从而导致速度的增大. 变形结束后, 气动中心停止后移,此时的升力在竖直面内的分量仍然小于重力, 高度继续下降, 阻力仍然小于推力,速度继续增大. 而俯仰角和攻角开始回升, 使得升力逐渐增大, 直到与重力平衡,到达新的平衡状态. 由于机翼折叠后, 机翼的面积和展长减小, 会使得升力减小,故新的平衡状态下的推力会减小.
当折叠速度不同而折叠角度相同时, 折叠角速度越大, 飞行参数的变化越小,这是因为折叠角速度越大, 力和力矩的变化越快, 参数恢复得也越快,而不同的折叠角速度导致的最终平衡态差别并不大, 所以在变形过程中,为了使飞机更快地回到平衡态, 可以选择稍大的折叠角速度.
4 基于自抗扰理论的稳定控制器设计
根据纵向动态特性可知, 机翼折叠过程中,飞机的速度、攻角、俯仰角和高度均无法保持稳定,故需要设计稳定控制器进行变形过程中的稳定控制.自抗扰控制是韩京清提出的一种非线性控制方法[20 ] ,其原理是将系统外部扰动、参数摄动、未建模动态、系统内部各状态耦合影响等所有不确定因素都归结为系统总扰动并通过ESO进行实时估计,进而实现对扰动的补偿[33 ] .
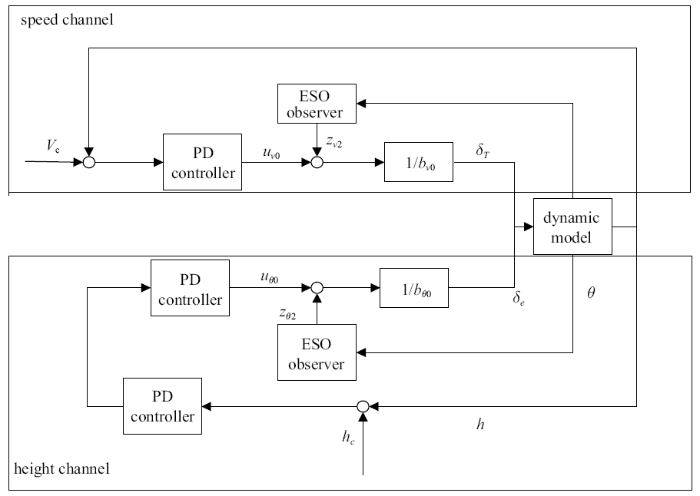
本文基于自抗扰控制理论,将折叠翼飞行器纵向动力学中的非线性项、时变项和耦合项作为系统总扰动,分别针对速度通道和高度通道, 设计基于ESO的反馈控制律对飞行器进行稳定控制,控制结构图如图9 所示.
图9
图9
自抗扰控制流程图
Fig. 9
Schematic of active disturbance control
4.1 速度通道
(15) $\dot{{V}}=f_{V} +b_{V} \delta _{T}$
式中, $f_{V} $为非线性项, $b_{V} $为控制系数, 其表达式为
(16) $\left. {\begin{array}{l} f_{V} =\dfrac{F_{{s1}} }{m}-g\sin (q-\alpha )-\\ \dfrac{1}{2m}rV^2S_{w} \left( {C_{D0} +C_{{D}\alpha } \alpha } \right) \\ b_{V} =\dfrac{1}{m}k_{T} \cos a \\ \end{array}} \right\}$
$b_{V} $为时变量, 而要实现自抗扰控制, 只需要知道$b_{V} $的估计值即可, 取变形前的初始值作为其估计值, 即
(17) $b_{V0} =\frac{1}{m}k_{T} \cos \alpha _0$
式中, $\alpha _0 $为初始平衡时的攻角. 则式(15)等效为
(18) $\dot{{V}}=f_{V1} +U_{V}$
式中, $f_{V1} =f_{V} +\left( {b_{V} -b_{V0} } \right)\delta _{T}$为新的总扰动形式, $U_{V} =b_{V0} \delta _{T} $为等效控制量.
(19) $\left. {\begin{array}{l} e_{v1} =z_{v1} -V \\ e_{v2} =z_{v2} -f_{V1} \\ \dot{{z}}_{v1} =z_{v2} -\beta _{v1} e_{v1} +U_{V} \\ \dot{{z}}_{v2} =-\beta _{v2} fal(e_{v1} ,a_{v1} ,\delta _{v1} ) \\ \end{array}} \right\}$
式中, $z_{v1} $是ESO对实际速度的估计, $z_{v2} $是对速度通道总扰动$f_{v1}$的估计. 非线性函数$fal(e_{v1} ,a_{v1} ,\delta _{v1} )$的表达式为
(20) $fal(e_{v1} ,a_{v1} ,\delta _{v1} )=\left\{ {\begin{array}{l} \left| {z_{v1} } \right|^{\alpha _{v1} }{sgn}(z_{v1} ),\left| {z_{v1} } \right|>\delta _{v1} \\ z_{v1} /\delta _{v1} ^{1-\alpha _{v1} },\left| {z_{v1} } \right|\leqslant \delta _{v1} \\ \end{array}} \right.$
式中, $\alpha _{v1} $和$\delta _{v1} $为可调参数, $0<\alpha _{v1} <1$, $\delta _{v1} >0$. 只要参数$\beta _{v1} $和$\beta _{v2} $选择合适, 满足收敛和稳定条件, 当其稳定时, ESO状态将满足以下收敛关系
(21) $z_{v1} \to V,\ \ z_{v2} \to f_{v1}$
由此可知, 若利用估计量$z_{v2} $对速度通道(18)实施动态反馈控制补偿
(22) $U_{V} =U_{V0} -z_{v2}$
(23) $\dot{{V}}=U_{V0}$
(24) $\left. {\begin{array}{l} e_v =V_{c} -V \\ U_{V0} =k_{{p}v} e_v +k_{{d}v} \dot{{e}}_v \\ \end{array}} \right\}$
式中, $V_{c} $为指令速度. 最终得到油门开度指令控制量为
(25) $\delta _{T} =\left( {U_{V0} -z_{v2} } \right)/b_{v0}$
为了从理论上验证算法的合理性, 基于自稳定域理论来证明ESO与控制器的稳定性. 令$x_1 =V$, $x_2 =f_{V1} $, $w=-\dot{{f}}_{V1} $, 其中, $w$有界, $\left| w \right|<W$, 式(18)可写成如下形式
(26) $\left. {\begin{array}{l} \dot{{x}}_1 =x_2 +U_{V} \\ \dot{{x}}_2 =-w \\ \end{array}} \right\}$
令$e_1 =z_{v1} -x_1 $, $e_2 =z_{v2} -x_2 $, $e_{v1} =e_1 $, $f_c =fal(e_1 ,a_{v1} ,\delta _{v1} )$, 可知则状态误差方程为
(27) $\left. {\begin{array}{l} \dot{{e}}_1 =e_2 -\beta _{v1} e_1 \\ \dot{{e}}_2 =w-\beta _{v2} f_{c} \\ \end{array}} \right\}$
(28) $V_1 =\frac{1}{2}g_2 ^2(e_1 ,e_2 )$
(29) $g_2 (e_1 ,e_2 )=\left\{ {\begin{array}{ll} \left| {h_2 (e_1 ,e_2 )} \right|,& \left| {h_2 (e_1 ,e_2 )} \right|>g_1 (e_1 ,e_2 ) \\ g_1 (e_1 ,e_2 ), & {\left| {h_2 (e_1 ,e_2 )} \right|\leqslant g_1 (e_1 ,e_2 )} \end{array}} \right.$
(30) $h_2 (e_1 ,e_2 )=e_2 -\beta _{v1} e_1 +kg_1 (e_1)\text{sign}(e_1)$
(31) $g_1 (e_1)=\frac{\beta _{v2} }{k\beta _{v1} }\left| {f_{c} } \right|,\ \ k>1$
对于上述定义的函数$V_1 $, 根据文献[34 ] 可得到如下定理
引理1 区域$G_2 =\left\{ {(e_1 ,e} \right._2 ):\left. {\left| {h_2 (e_1 ,e_2)} \right|\leqslant g_1 (e_1 )} \right\} $为系统(26)的自稳定域.
定理1 对于闭环系统(26), 假定$w$有界, 即$\left| w \right|<W$,对$W>0$, 如果满足以下两个条件
(32) $\beta _{v1}^2 >(1+k)c_2 \beta _{v2} \left| {\dfrac{{d}f_{f} }{{d}e_1 }} \right|, c_2 >1$
(33) $\beta _{v1} g_2 >\dfrac{c_2 }{c_2 -1}W_2$
则$\dot{{V}}_1 <0$, 系统为稳定系统.
证明: 当$\left| {h_2 (e_1 ,e_2 )} \right|>g_1 (e_1 ,e_2 )$时, 对式(28)求导, 可以得到
(34) $\begin{array}\dot{{V}}_1 =h_2 (e_1 ,e_2 )\dot{{h}}_2 (e_1 ,e_2 )=h_2 (\frac{\partial h_2 }{\partial e_1 }\dot{{e}}_1 +\frac{\partial h_2 }{\partial e_2 }\dot{{e}}_2) =\\ h_2 [\frac{\partial h_2 }{\partial e_1 }(h_2 -kg_1 \text{sign}(e_1 ))+w-\beta _{v2} f_{c} ] =\\ h_2 w+h_2 ^2\frac{\partial h_2 }{\partial e_1 }-h_2 (\beta _{v2} \frac{\left| {f_{c} } \right|}{g_1 }+k\frac{\partial h_2 }{\partial e_1 })g_1 \text{sign}(e_1 )=\\ h_2 \{k\beta _{v1} +k[-\beta _{v1} +k\frac{{d}(g_1 \text{sign}(e_1 ))}{{d}x}]g_1\text{sign}(e_1 )\} +\\ h_2 w+h_2 ^2\frac{\partial h_2 }{\partial e_1 } =h_2 w+h_2 ^2\frac{\partial h_2 }{\partial e_1 }+k^2h_2 g_1 \left| {\frac{{d}g_1 }{{d}x}} \right| \leqslant \\ h_2 w-\beta _{v1} h_2 ^2+kh_2 ^2\left| {\frac{{d}g_1 }{{d}x}} \right|+k^2h_2 g_1 \left| {\frac{{d}g_1 }{{d}x}} \right|\leqslant\\ \frac{c_2 -1}{c_2 }\beta _{v1} g_2 h_2 -\beta _{v1} h_2 ^2+(1+k)h_2^2\frac{\beta _{v2} }{\beta _{v1} }\left| {\frac{{d}f_{c} }{{d}x}} \right| <0\end{array}$
当$\left| {h_2 (e_1 ,e_2 )} \right|\leqslant g_1 (e_1 ,e_2 )$, 即
(35) $\begin{array}\dot{{V}}_1 =g_1 (e_1 )\dot{{g}}_1 (e_1 )=g_1 (e_1 )\frac{\beta _{v2} }{k\beta _{v1} }\frac{{d}\left| {f_{c} } \right|}{{d}x} =\\ \left( {\frac{\beta _{v2} }{k\beta _{v1} }} \right)^2\left| {f_{c} } \right|\left| {\frac{{d}f_{c} }{{d}x}} \right|\dot{{e}}_1 \text{sign}(e_1 ) =\\ \left( {\frac{\beta _{v2} }{k\beta _{v1} }} \right)^2\frac{\left| {f_{c} } \right|}{\left| {e_1 } \right|}\left| {\frac{{d}f_{c} }{{d}x}} \right|\dot{{e}}_1 e_1 =\\ \left( {\frac{\beta _{v2} }{k\beta _{v1} }} \right)^2\frac{\left| {f_{c} } \right|}{\left| {e_1 } \right|}\left| {\frac{{d}f_{c} }{{d}x}} \right|e_1 (e_2 -\beta _{v1} e_1 ) \leqslant\\ \left( {\frac{\beta _{v2} }{k\beta _{v1} }} \right)^2\frac{\left| {f_{c} } \right|}{\left| {e_1 } \right|}\left| {\frac{{d}f_{c} }{{d}x}} \right|e_1 (g_1 -kg_1 \text{sign}(e_1 )) =\\ \left( {\frac{\beta _{v2} }{k\beta _{v1} }} \right)^2\frac{\left| {f_{c} } \right|}{\left| {e_1 } \right|}\left| {\frac{{d}f_{c} }{{d}x}} \right|(-kg_1 \left| {e_1 } \right|+g_1 e_1 ) <\\ -\left( {\frac{\beta _{v2} }{k\beta _{v1} }} \right)^2\frac{\left| {f_{c} } \right|}{\left| {e_1 } \right|}\left| {\frac{{d}f_{c} }{{d}x}} \right|(k-1)g_1 \left| {e_1 } \right|<0\end{array}$
由式(24)可知, 对$e_v $求导, 可以得到
(36) $\dot{{e}}_v =\dot{{V}}_{c} -\dot{{V}}=-U_{V0} =-k_{{p}v} e_v -k_{{d}v} \dot{{e}}_v$
(37) $\dot{{e}}_v =-\frac{k_{{p}v} }{1+k_{{d}v} }e_v$
(38) $V_2 =\frac{1}{2}e_v^2$
(39) $\dot{{V}}_2 =e_v \dot{{e}}_v =-\frac{k_{{p}v} }{1+k_{{d}v} }e_v ^2\leqslant 0$
定义函数$V=V_1 +V_2 $, 当满足条件(32)和(33)时, $\dot{{V}}<0$, 控制器稳定.
4.2 高度通道
将高度通道分为内外环, 其中, 俯仰角回路为内环, 控制量为舵偏角$\delta_{e} $, 高度回路为外环. 首先, 设计PID控制器进行指令高度的稳定控制, 并得到指令俯仰角. 然后基于自抗扰理论设计俯仰回路控制器, 通过控制舵偏角, 保证实际舵偏角跟踪指令俯仰角.
外环高度回路中, 根据式(11)中的高度方程直接设计PID跟踪控制器为
(40) $\left. {\begin{array}{l} e_h =h_{c} -h \\ \theta _{c} =k_{{p}h} e_h +k_{{i}h} \int {e_h } {d}t+k_{{d}h} \dot{{e}}_h \\ \end{array}} \right\}$
式中, $h_{c} $为指令速度, 控制量$\theta _{c} $将作为内回路的指令值.
内环俯仰回路中, 根据式(11)~式(14)将俯仰回路写为如下形式
(41) $\ddot{{\theta }}=f_\theta +b_\theta \delta _{e}$
式中, $f_\theta $为非线性项, $b_\theta $为控制系数, 表达式为
(42) $\left. {\begin{array}{l} f_\theta =\dfrac{1}{I_{{yy}} }\rho V^2S_{c} c_{A} \left( {C_{m0} +C_{m\alpha } \alpha } \right)-\dfrac{1}{I_{{yy}} }M_{Sy} \\ b_\theta =\dfrac{1}{I_{{yy}} }\rho V^2S_{c} c_{A} C_{m\delta _{e} } \\ \end{array}} \right\}$
为实现自抗扰控制, 取$b_\theta $初始值作为其估计值, 故有
(43) $b_{\theta 0} =\frac{1}{I_{{yy}} }\rho V_0 ^2S_{c} c_{A} C_{m\delta _{e} }$
式中, $V_0 $表示初始速度. 式(41)可等效为
(44) $\ddot{{\theta }}=f_{\theta 1} +U_\theta$
式中, $f_{\theta 1} =f_\theta +\left( {b_\theta -b_{\theta _0} }\right)u_\theta $为新总扰动形式, $U_\theta =b_{\theta 0} \delta _{e}$为等效控制量.
(45) $\left. {\begin{array}{l} e_{\theta 1} =z_{\theta 1} -\theta \\ \dot{{z}}_{\theta 1} =z_{\theta 2} -\beta _{\theta 1} e_{\theta 1} \\ \dot{{z}}_{\theta 2} =z_{\theta 3} -\beta _{\theta 2} fal(e_{\theta 1} ,a_{\theta 1} ,\delta _{\theta 1} )+b_{\theta 0} \delta _{e} \\ \dot{{z}}_{\theta 3} =-\beta _{\theta 3} fal(e_{\theta 1} ,a_{\theta 2} ,\delta _{\theta 1} ) \\ \end{array}} \right\}$
式中, $z_{\theta 1} $是ESO对俯仰角$\theta $的估计, $z_{\theta 2} $是ESO对俯仰角速度$q$的估计, $z_{\theta 3} $是对俯仰回路总扰动$f_{\theta 1}$的估计. 只要参数$\beta _{\theta 1}$, $\beta _{\theta 2}$, $\beta _{\theta3} $选择合适, 满足收敛和稳定条件, 当其稳定时, ESO状态将满足以下收敛关系
(46) $z_{\theta 2} \to \theta ,\ \ z_{\theta 2} \to q,\ \ z_{\theta 3} \to f_{\theta 1}$
利用估计量$z_{\theta 3} $对俯仰回路(44)实施动态反馈控制补偿
(47) $U_\theta =U_{\theta 0} -z_{\theta 3}$
(48) $\ddot{{\theta }}=U_{\theta 0}$
(49) $\left. {\begin{array}{l} e_{\theta 2} =\theta _{c} -\theta \\ U_{\theta 0} =k_{p\theta } e_{\theta 2} +k_{d\theta } \dot{{e}}_{\theta 2} \end{array}} \right\}$
(50) $\delta _{e} =\left( {U_{\theta 0} -z_{\theta 2} } \right)/b_{\theta 0}$
5 仿真结果与分析
基于非线性动力学模型和控制器模型, 在MATLAB中进行仿真分析. 飞行器的基本参数:质量$m=1247$ kg, 俯仰转动惯量$I_{{yy}} =4067.3$ kg$\cdot$m$^2$,机翼参考面积$S_{w} =17.09$ m$^2$, 平均几何弦长$c_{A} =1.74$ m.初始状态为: 速度$V_0 =0.4$ Ma, 高度$h_0 =4000$ m, 俯仰角$\theta_0 =4^\circ$, 攻角$\alpha _0 =4^\circ$, 俯仰角速度$q_0 =0(^\circ$)/s. ESO的初始值为:$z_{v10} =0.4$ Ma, $z_{v20} =0$, $z_{\theta 10} =4^\circ$, $z_{\theta 20}=0$, $z_{\theta 30} =0$. 通过调试得到控制器参数, 速度通道: $\beta _{v1}=250$, $\beta _{v2} =2500$, $\alpha _{v1} =0.5$, $\delta _{v1} =0.009$,$k_{{P}v} =100$, $k_{{d}v} =1000$; 俯仰角通道: $\beta _{\theta 1}=350$, $\beta _{\theta 2} =4000$, $\beta _{\theta 3} =70 000$, $\alpha_{\theta 1} =0.5$, $\alpha _{\theta 2} =0.25$, $\delta _{\theta 1} =0.005$,$\delta _{\theta 2} =0.005$, $k_{{P}\theta } =300$, $k_{{d}\theta} =2400$; 高度通道: $k_{{p}h} =0.2$, $k_{{i}h} =0.15$,$k_{{d}h} =0.021$.
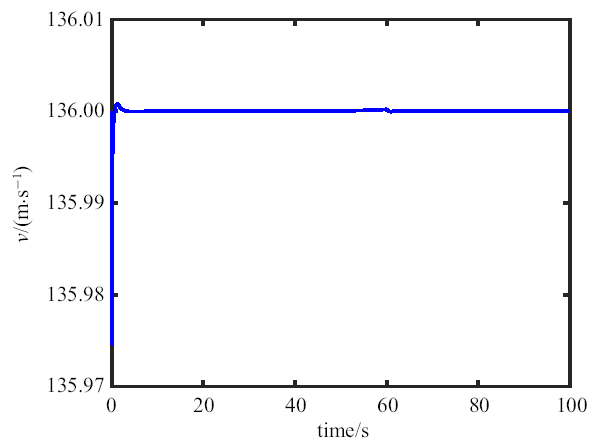
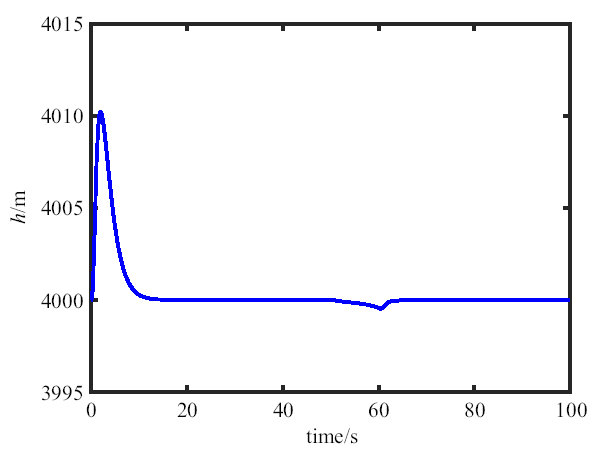
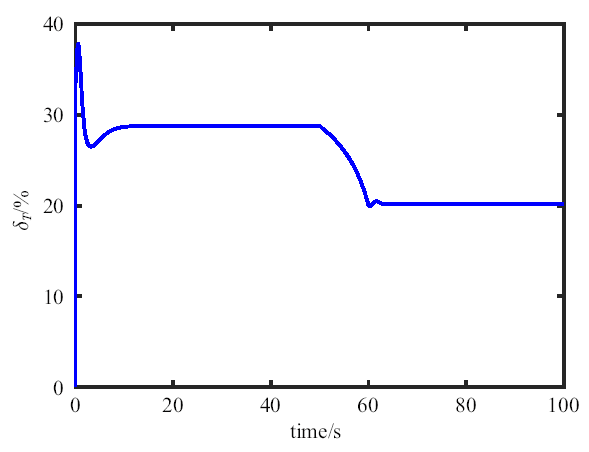
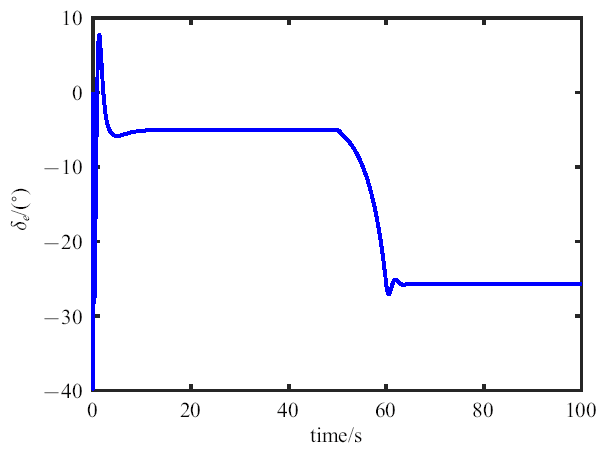
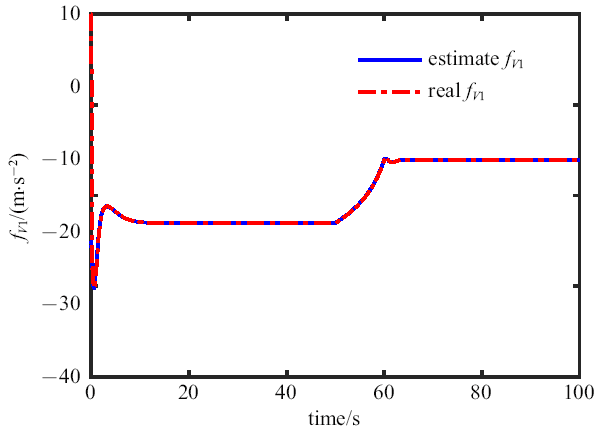
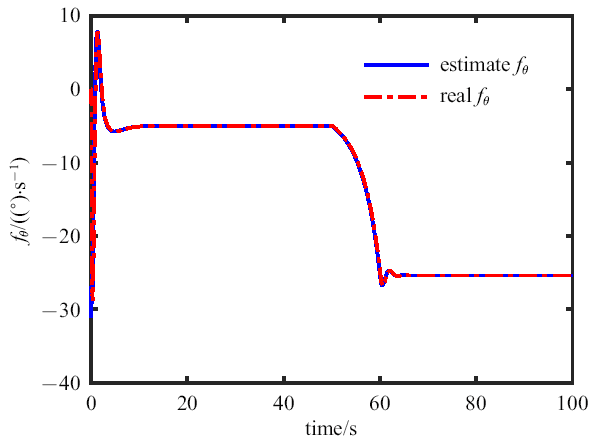
为了研究机翼折叠过程中保持初始平衡速度和高度时状态量的变化情况, 给定折叠前后指令速度$V_{c}=0.4$ Ma, 指令高度$h_{c}=4000$ m, 在50 s的时候给定${6}(^\circ$)/s的折叠角速度, 使机翼折叠$60^\circ$,得到如下仿真结果如图10 ~图15 所示.
图10
图10
速度变化图
Fig. 10
Schematic of speed change
图11
图11
控制器作用下的高度变化图
Fig. 11
Schematic of height change
图12
图12
控制器作用下的油门开度变化图
Fig. 12
Schematic of throttle opening change
图13
图13
控制器作用下的舵偏角变化图
Fig. 13
Schematic of rudder angle change
图14
图14
速度通道的非线性项
Fig. 14
Schematic of nonlinear term of the speed channel
图15
图15
俯仰通道的非线性项跟踪
Fig. 15
Schematic of nonlinear term of the pitch channel
从图10 ~图15 中可以看出, 仿真初始阶段, 各飞行参数会有一个较大的抖动, 这是因为在初始阶段,ESO估计的速度通道的非线性项和俯仰通道的非线性项与实际的非线性项有较大的偏差, 经过反馈补偿后, 相当于给系统带来了一个扰动, 导致飞行参数出现了较大的抖动. 从图14 和图15 中可以看出, ESO的非线性项估计值只在仿真初始阶段与实际非线性值有一定的偏差,而后很快地跟踪上实际非线性项. 在50 s的时候, 机翼开始折叠, 由机翼折叠所带来的干扰项都通过ESO进行估计补偿, 故机翼折叠后,速度和高度能够保持原来的值不变. 机翼折叠过程中, 速度会有一个小幅度的增大, 高度会有一个小幅度的减小, 这是因为机翼刚开始折叠时, 机翼面积减小, 升力减小, 无法平衡重力, 故高度下降, 阻力减小, 推力变化较慢, 故速度增大. 折叠完成后, 油门开度减小, 舵偏角增大, 这是机翼的折叠导致机翼面积和展长减小, 升力和阻力减小, 重新平衡时, 推力减小, 故油门开度减小, 重力不变, 为了让升力变大, 故舵偏角增大.
6 结论
(1)基于Kane方法建立了折叠翼飞行器的动力学模型,推导出了折叠产生的附加力和附加力矩的具体形式,便于后续动态特性分析和控制器设计.
(2)对不同折叠角速度下的飞行器纵向动态响应的仿真结果表明:机翼的折叠会导致飞行速度、俯仰角和高度发生变化, 折叠角速度越大,飞行器状态变化越快, 变化量越小.
(3)直接针对非线性纵向动力学模型设计基于ESO的变形稳定控制器,避免了非线性动力学模型的线性化带来的误差, 简化了控制器的设计.
(4)数值仿真结果表明, 在所设计控制器的作用下,机翼折叠前后都能够很好地达到稳定状态, ESO能够很好地对系统总扰动进行估计.
参考文献
View Option
[1]
陆宇平 , 何真 , 吕毅 . 变体飞行器技术
航空制造技术 , 2008 (22 ):26 -29
URL
[本文引用: 1]
当前,民用和军事领域都对飞行器提出了更高的要求,要求新一代飞行器能够在变化很大的飞行环境(高度、马赫数等)下和在执行多种任务(如起降、巡航、机动、盘旋、攻击等)时始终保持良好性能.固定外形的飞行器难以满足这个要求.
( Lu Yuping He Zhen Lü Yi . Morphing aircraft technology
Aeronautical Manufacturing Technology 2008 (22 ):26 -29 (in Chinese))
URL
[本文引用: 1]
[2]
Rodriguez A . Morphing aircraft technology survey
// 45th AIAA Aerospace Sciences Meeting and Exhibit , 2007
[本文引用: 1]
[3]
刘玮 , 陆宇平 , 殷明 . 折叠翼飞行器气动建模及变形稳定控制律设计
电子设计工程 , 2014 ,22 (8 ):1 -4
[本文引用: 2]
( Liu Wei Lu Yuping Yin Ming . Aerodynamic modeling and robust controller design for a folding wing aircraft
Electronic Design Engineering 2014 ,22 (8 ):1 -4 (in Chinese))
[本文引用: 2]
[4]
杨贯通 . 变外形飞行器建模与控制方法研究. [博士论文]
北京: 北京理工大学 , 2015
[本文引用: 1]
( Yang Guantong . Research on modeling and control method of morphing aircraft. [PhD Thesis]
Beijing: Beijing Institute of Technology , 2015 (in Chinese))
[本文引用: 1]
[5]
Yue T Wang L Ai J . Longitudinal linear parameter varying modeling and simulation of morphing aircraft
Journal of Aircraft 2013 ,50 (6 ):1673 -1681
DOI
URL
[本文引用: 1]
The purpose of this paper is to present linear parameter varying modeling and simulation of a folding-wing morphing aircraft in the wing-folding process. Morphing aircraft can alter the shape to adapt to mission environment changing. When the wing shape is varying, the dynamic responses of the morphing aircraft will be dependent on the time-varying aerodynamic forces and moments, which will be a function of the wing shape change by the morphing command. The folding-wing morphing aircraft is regarded as a variable geometry rigid body, and the six-degree-of-freedom nonlinear dynamic model in the wing-folding process is founded. The decoupled longitudinal dynamic equation of the morphing process is deduced by simplification, and the longitudinal dynamic responses of the wing morphing process are numerically simulated by the quasi-steady aerodynamic assumption. Furthermore, using the Jacobian linearization approach, the longitudinal nonlinear dynamics equations of morphing aircraft are linearized, and the longitudinal linear parameter varying model of the morphing aircraft in the wing-folding process is obtained. Finally, the linear parameter varying model is validated by the open-loop time responses compared to the nonlinear aircraft responses. The research results can be as great reference for the linear parameter varying controller design for the morphing aircraft in the wing shape varying.
[6]
Grant D Lind R . Effects of time-varying inertias on flight dynamics of an asymmetric variable-sweep morphing aircraft
// AIAA Atmospheric Flight Mechanics Conference and Exhibit , 2007
[本文引用: 1]
[7]
郭建国 , 陈惠娟 , 周军 等 . 非对称伸缩翼飞行器动力学建模及特性分析
系统工程与电子技术 , 2016 ,38 (8 ):1951 -1957
[本文引用: 1]
( Guo Jianguo Chen Huijuan Zhou Jun , et al . Dynamic modeling and characteristic analysis of asymmetric telescopic wing aircraft
Systems Engineering and Electronics 2016 ,38 (8 ):1951 -1957 (in Chinese))
[本文引用: 1]
[8]
Seigler TM Neal DA Bae JS , et al . Modeling and flight control of large-scale morphing aircraft
Journal of Aircraft 2007 ,44 (4 ):1077 -1087
[本文引用: 1]
[9]
Obradovic B Subbarao K . Modeling of flight dynamics of morphing wing aircraft
Journal of Aircraft 2011 ,48 (2 ):391 -402
[本文引用: 1]
[10]
Zhu L Liu Z Li L . Modeling and aerodynamic characteristics analysis of morphing aircraft
// 29th Chinese Control and Decision Conference , 2017 : 1703 -1709
[本文引用: 1]
[11]
张杰 , 吴森堂 . 一种变体飞行器的动力学建模与动态特性分析
北京航空航天大学学报 , 2015 ,41 (1 ):58 -64
[本文引用: 1]
( Zhang Jie Wu Sentang . Dynamic modeling and dynamic characteristics analysis of a morphing aircraft
Journal of Beijing University of Aeronautics and Astronautics 2015 ,41 (1 ):58 -64 (in Chinese))
[本文引用: 1]
[12]
陆宇平 , 何真 . 变体飞行器控制系统综述
航空学报 , 2009 ,30 (10 ):1906 -1911
[本文引用: 1]
( Lu Yuping He Zhen . A survey of morphing aircraft control systems
Acta Aeronautica ET Astronautica Sinica 2009 ,30 (10 ):1906 -1911 (in Chinese))
[本文引用: 1]
[13]
Wen N Liu Z Sun Y , et al . Design of LPV-based sliding mode controller with finite time convergence for a morphing aircraft
International Journal of Aerospace Engineering 2017 ,2017 :1 -20
[本文引用: 1]
[14]
Guo TH Hou ZX Liu ZW , et al . H$\infty $ attitude control with initiative morphing strategy based on linearization for gull-wings
// 36th Chinese Control Conference , 2017
[本文引用: 1]
[15]
Lee J Kim S-H Jung S , et al . Linear parameter-varying control of variable span-sweep morphing aircraft
// AIAA Scitech 2019 Forum , 2019
[本文引用: 1]
[16]
程昊宇 , 董朝阳 , 王青 等 . 变体飞行器的非脆弱有限时间鲁棒控制器设计
控制与决策 , 2017 ,32 (11 ):1933 -1940
[本文引用: 1]
( Cheng Haoyu Dong Chaoyang Wang Qing , et al . Non-fragile finite-time robust controller design for variant aircraft
Control and Decision 2017 ,32 (11 ):1933 -1940 (in Chinese))
[本文引用: 1]
[17]
陶晓荣 , 陆宇平 , 殷明 . 展向变形飞行器机翼扭转时的鲁棒飞行控制与分析
电子设计工程 , 2014 ,22 (10 ):159 -162
[本文引用: 1]
( Tao Xiaorong Lu Yuping Yin Ming . Robust flight control and analysis of aircraft with spanwise morphing
Electronic Design Engineering 2014 ,22 (10 ):159 -162 (in Chinese))
[本文引用: 1]
[18]
夏川 , 董朝阳 , 程昊宇 等 . 变体飞行器有限时间切换H_$\infty $跟踪控制
兵工学报 , 2018 ,39 (3 ):485 -493
[本文引用: 1]
( Xia Chuan Dong Chaoyang Cheng Haoyu , et al . Variant aircraft limited time switching H_$\infty $ tracking control
Acta Armamentarii 2018 ,39 (3 ):485 -493 (in Chinese))
[本文引用: 1]
[19]
刘玮 . 折叠翼飞行器多体动力学建模与控制. [博士论文]
南京: 南京航空航天大学 , 2014
[本文引用: 1]
( Liu Wei . Multi-body dynamics modeling and control of folding wing aircraft. [PhD Thesis]
Nanjing: Nanjing Aerospace University , 2014 (in Chinese))
[本文引用: 1]
[20]
韩京清 . 自抗扰控制技术
前沿科学 , 2007 (1 ):24 -31
[本文引用: 2]
( Han Jingqing . Active disturbance rejection control technology
Frontier Science 2007 (1 ):24 -31 (in Chinese))
[本文引用: 2]
[21]
韩京清 . 自抗扰控制器及其应用
控制与决策 , 1998 ,13 (1 ):19 -23
[本文引用: 2]
( Han Jingqing . Active disturbance rejection controller and its application
Control and Decision 1998 ,13 (1 ):19 -23 (in Chinese))
[本文引用: 2]
[22]
韩京清 . 从PID技术到"自抗扰控制"技术
控制工程 , 2002 ,9 (3 ):13 -18
[本文引用: 1]
( Han Jingqing . From PID technology to "auto-disturbance control" technology
Control Engineering of China 2002 ,9 (3 ):13 -18 (in Chinese))
[本文引用: 1]
[23]
黄一 , 韩京清 . 非线性连续二阶扩张状态观测器的分析与设计
科学通报 , 2000 ,45 (13 ):1373 -1379
URL
[本文引用: 1]
非线性连续扩张状态观测器(ESO)是不同于以往输出误差校正方式的新型观测器, 难以用传统观测器设计理论进行理论分析. 用自稳定域理论分析二阶ESO的收敛性及估计误差问题, 揭示采用非光滑连续结构的优越之处.
( Huang Yi Han Jingqing . Analysis and design of nonlinear continuous second order extended state observer
Chinese Science Bulletin 2000 ,45 (13 ):1373 -1379 (in Chinese))
DOI
URL
[本文引用: 1]
[24]
韩京清 , 张荣 . 二阶扩张状态观测器的误差分析
系统科学与数学 , 1999 (4 ):465 -471
URL
[本文引用: 1]
本文利用分片光滑的Lyapunov函数来进行扩张状态观测器的误差分析,指出了非线性扩张状态观测器有更好的估计精度能力,给出了为提高估计精度扩张状态观测器的参数所满足的条件.
( Han Jingqing Zhang Rong . Error analysis of second order extended state observer
Journal of Systems Science and Mathematical Sciences 1999 (4 ):465 -471 (in Chinese))
URL
[本文引用: 1]
The piece-wise smoothy Lyapunov function is used for the error analysis of the second order ESO. It is indicated that the nonlinear ESO has ability to get better estimation precision. For the better estimation precision the conditions that should be satisfied by the parameters of ESO are obtained.
[25]
赵志良 . 非线性自抗扰控制的收敛性. [博士论文]
合肥: 中国科学技术大学 , 2012
[本文引用: 1]
( Zhao Zhiliang . Convergence of nonlinear active disturbance rejection control. [PhD Thesis]
Hefei: University of Science and Technology of China , 2012 (in Chinese))
[本文引用: 1]
[26]
韩京清 , 王伟 . 非线性跟踪-微分器
系统科学与数学 , 1994 (2 ):177 -183
[本文引用: 1]
( Han Jingqing Wang Wei . Nonlinear tracking-differentiator
Journal of Systems Science and Mathematical Sciences 1994 (2 ):177 -183 (in Chinese))
[本文引用: 1]
[27]
郭淑娟 . 可变体飞行器的飞行协调控制问题研究. [硕士论文]
南京: 南京航空航天大学 , 2012
[本文引用: 1]
( Guo Shujuan . Research on flight coordination control problem of variable body aircraft. [Master Thesis]
Nanjing: Nanjing Aerospace University , 2012 (in Chinese))
[本文引用: 1]
[28]
王益利 , 范纪华 , 章定国 等 . 考虑附加质量的中心刚体-柔性梁系统的动力学特性研究
应用力学学报 , 2018 ,35 (6 ):1380 -1386
[本文引用: 1]
( Wang Yili Fan Jihua Zhang Dingguo , et al . Study on dynamic characteristics of central rigid-flexible beam system considering additional mass
Chinese Journal of Theoretical and Applied Mechanics 2018 ,35 (6 ):1380 -1386 (in Chinese))
[本文引用: 1]
[29]
吴森堂 . 飞行控制系统 . 北京 : 北京理工大学出版社 , 2005
[本文引用: 1]
( Wu Sentang . Flight Control System Beijing : Beijing Institute of Technology Press , 2005 (in Chinese))
[本文引用: 1]
[30]
殷明 , 陆宇平 , 姚克明 等 . 伸缩翼飞机变形飞行的建模与滑模变增益控制
系统工程与电子技术 , 2015 ,37 (11 ):2554 -2560
[本文引用: 1]
( Yin Ming Lu Yuping Yao Keming , et al . Modeling and sliding mode variable gain control of telescopic aircraft deformation flight
Systems Engineering and Electronics 2015 ,37 (11 ):2554 -2560 (in Chinese))
[本文引用: 1]
[31]
叶友达 , 张涵信 , 蒋勤学 等 . 近空间高超声速飞行器气动特性研究的若干关键问题
力学学报 , 2018 ,50 (6 ):1292 -1310
[本文引用: 1]
( Ye Youda Zhang Hanxin Jiang Qinxue , et al . Some key Problems of aerodynamic characteristics of near hypersonic vehicles
Chinese Journal of Theoretical and Applied Mechani 2018 ,50 (6 ):1292 -1310 (in Chinese))
[本文引用: 1]
[32]
曹登庆 , 白坤朝 , 丁虎 等 . 大型柔性航天器动力学与振动控制研究进展
力学学报 , 2019 ,51 (1 ):1 -13
[本文引用: 1]
( Cao Chengqing Bai Kunchao Ding Hu , et al . Advances in dynamics vibration control of large-scale flexible spaceratf
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (1 ):1 -13 (in Chinese))
[本文引用: 1]
[33]
赵世伟 , 孙秀霞 , 贾文铜 等 . 超低空重装空投纵向自抗扰控制
火力与指挥控制 , 2017 ,42 (4 ):6 -9
[本文引用: 1]
( Zhao Shiwei Sun Xiuxia Jia Wentong , et al . Longitudinal active disturbance rejection control for ultra-low-altitude heavy-duty airdrop
Fire Control & Command Control 2017 ,42 (4 ):6 -9 (in Chinese))
[本文引用: 1]
[34]
黄一 , 韩京清 . 非线性连续二阶扩张状态观测器的分析与设计
科学通报 , 2000 ,45 (13 ):1373 -1379
[本文引用: 1]
( Huang Yi Han Jingqing . Analysis and design of nonlinear continuous second order extended state observer
Chinese Science Bulletin 2000 ,45 (13 ):1373 -1379 (in Chinese))
[本文引用: 1]
变体飞行器技术
1
2008
... 变体飞行器是一种能够根据不同的飞行环境改变构型, 实现最佳的气动性能, 完成多种飞行任务的飞行器[1 ] . 作为变体飞行器的一种,折叠翼飞行器能够通过机翼的折叠改变自身构型[2 ] , 以不同的构型完成不同的飞行任务. 机翼折叠时, 翼面积、展长减小, 后掠角增大, 适合低空高速飞行, 机翼展开时, 翼面积和展长增大, 升阻比增大, 适合于高空长航时飞行, 节省能耗[3 ] . ...
变体飞行器技术
1
2008
... 变体飞行器是一种能够根据不同的飞行环境改变构型, 实现最佳的气动性能, 完成多种飞行任务的飞行器[1 ] . 作为变体飞行器的一种,折叠翼飞行器能够通过机翼的折叠改变自身构型[2 ] , 以不同的构型完成不同的飞行任务. 机翼折叠时, 翼面积、展长减小, 后掠角增大, 适合低空高速飞行, 机翼展开时, 翼面积和展长增大, 升阻比增大, 适合于高空长航时飞行, 节省能耗[3 ] . ...
Morphing aircraft technology survey
1
2007
... 变体飞行器是一种能够根据不同的飞行环境改变构型, 实现最佳的气动性能, 完成多种飞行任务的飞行器[1 ] . 作为变体飞行器的一种,折叠翼飞行器能够通过机翼的折叠改变自身构型[2 ] , 以不同的构型完成不同的飞行任务. 机翼折叠时, 翼面积、展长减小, 后掠角增大, 适合低空高速飞行, 机翼展开时, 翼面积和展长增大, 升阻比增大, 适合于高空长航时飞行, 节省能耗[3 ] . ...
折叠翼飞行器气动建模及变形稳定控制律设计
2
2014
... 变体飞行器是一种能够根据不同的飞行环境改变构型, 实现最佳的气动性能, 完成多种飞行任务的飞行器[1 ] . 作为变体飞行器的一种,折叠翼飞行器能够通过机翼的折叠改变自身构型[2 ] , 以不同的构型完成不同的飞行任务. 机翼折叠时, 翼面积、展长减小, 后掠角增大, 适合低空高速飞行, 机翼展开时, 翼面积和展长增大, 升阻比增大, 适合于高空长航时飞行, 节省能耗[3 ] . ...
... 折叠翼飞行器在变形过程中, 其受到的气动力和力矩会随着折叠角变化而发生大幅变化[31 ] ,为了在后续控制器设计与数值仿真中准确模拟气动, 需要首先计算得到不同折叠角对应的气动数据并拟合出关于折叠角的函数.DATCOM软件能够利用飞行器的外形快速得到大量气动参数, 计算便捷, 适用于飞行器的理论验证阶段. 使用DATCOM软件,通过改变机身外的半翼展SSPNE、理论半翼展SSPN、内翼后掠角SAVSI和内翼上反角DHDADI来实现机翼的折叠[3 ] ,计算参数计算见表1 (表中 1 ft = 30.48 cm). ...
折叠翼飞行器气动建模及变形稳定控制律设计
2
2014
... 变体飞行器是一种能够根据不同的飞行环境改变构型, 实现最佳的气动性能, 完成多种飞行任务的飞行器[1 ] . 作为变体飞行器的一种,折叠翼飞行器能够通过机翼的折叠改变自身构型[2 ] , 以不同的构型完成不同的飞行任务. 机翼折叠时, 翼面积、展长减小, 后掠角增大, 适合低空高速飞行, 机翼展开时, 翼面积和展长增大, 升阻比增大, 适合于高空长航时飞行, 节省能耗[3 ] . ...
... 折叠翼飞行器在变形过程中, 其受到的气动力和力矩会随着折叠角变化而发生大幅变化[31 ] ,为了在后续控制器设计与数值仿真中准确模拟气动, 需要首先计算得到不同折叠角对应的气动数据并拟合出关于折叠角的函数.DATCOM软件能够利用飞行器的外形快速得到大量气动参数, 计算便捷, 适用于飞行器的理论验证阶段. 使用DATCOM软件,通过改变机身外的半翼展SSPNE、理论半翼展SSPN、内翼后掠角SAVSI和内翼上反角DHDADI来实现机翼的折叠[3 ] ,计算参数计算见表1 (表中 1 ft = 30.48 cm). ...
变外形飞行器建模与控制方法研究. [博士论文]
1
2015
... 作为一类新型飞行器, 折叠翼在带来优势的同时也带来了一些问题. 机翼的折叠所带来的额外自由度使得飞行器的动力学模型变得更加复杂, 而由变形引起的气动力与气动力矩、压心、质心和转动惯量等参数的变化以及附加力和附加力矩的产生都会给飞行器的稳定性和操纵性带来很大的影响[4 ] , 严重的甚至会失稳, 由此对飞行器的控制性能提出了更高的要求. ...
变外形飞行器建模与控制方法研究. [博士论文]
1
2015
... 作为一类新型飞行器, 折叠翼在带来优势的同时也带来了一些问题. 机翼的折叠所带来的额外自由度使得飞行器的动力学模型变得更加复杂, 而由变形引起的气动力与气动力矩、压心、质心和转动惯量等参数的变化以及附加力和附加力矩的产生都会给飞行器的稳定性和操纵性带来很大的影响[4 ] , 严重的甚至会失稳, 由此对飞行器的控制性能提出了更高的要求. ...
Longitudinal linear parameter varying modeling and simulation of morphing aircraft
1
2013
... 常用于建立折叠翼飞行器多刚体动力学模型的方法主要有3种: Newton-Euler方法、Lagrange方程、Kane方法.Yue等[5 ] 使用Newton-Euler方法建立了折叠翼变形飞行器的六自由度非线性动力学模型,并对其进行解耦, 研究了飞行器的纵向动力学响应. Grant等[6 ] 利用Newton-Euler建立了变后掠飞行器的动力学模型,并研究了飞行器的时变惯性效应.郭建国等[7 ] 利用Newton-Euler方法建立了非对称伸缩翼变形飞行器的动力学模型,并进行了动态特性分析. Seigler等[8 ] 使用Kane方法对建立了大型变形飞行器的六自由度非线性动力学模型.Obradovic等[9 ] 在考虑气动性能和惯性性能变化的情况系使用Kane方法建立了变形飞行器的六自由度非线性模型.Zhu等[10 ] 使用Kane方法建立了变跨度变掠飞行器的六自由度非线性动力学模型.张杰等[11 ] 利用Kane方法建立了变展长变后掠飞行器的六自由度动力学模型,并进行了动态特性分析. ...
Effects of time-varying inertias on flight dynamics of an asymmetric variable-sweep morphing aircraft
1
2007
... 常用于建立折叠翼飞行器多刚体动力学模型的方法主要有3种: Newton-Euler方法、Lagrange方程、Kane方法.Yue等[5 ] 使用Newton-Euler方法建立了折叠翼变形飞行器的六自由度非线性动力学模型,并对其进行解耦, 研究了飞行器的纵向动力学响应. Grant等[6 ] 利用Newton-Euler建立了变后掠飞行器的动力学模型,并研究了飞行器的时变惯性效应.郭建国等[7 ] 利用Newton-Euler方法建立了非对称伸缩翼变形飞行器的动力学模型,并进行了动态特性分析. Seigler等[8 ] 使用Kane方法对建立了大型变形飞行器的六自由度非线性动力学模型.Obradovic等[9 ] 在考虑气动性能和惯性性能变化的情况系使用Kane方法建立了变形飞行器的六自由度非线性模型.Zhu等[10 ] 使用Kane方法建立了变跨度变掠飞行器的六自由度非线性动力学模型.张杰等[11 ] 利用Kane方法建立了变展长变后掠飞行器的六自由度动力学模型,并进行了动态特性分析. ...
非对称伸缩翼飞行器动力学建模及特性分析
1
2016
... 常用于建立折叠翼飞行器多刚体动力学模型的方法主要有3种: Newton-Euler方法、Lagrange方程、Kane方法.Yue等[5 ] 使用Newton-Euler方法建立了折叠翼变形飞行器的六自由度非线性动力学模型,并对其进行解耦, 研究了飞行器的纵向动力学响应. Grant等[6 ] 利用Newton-Euler建立了变后掠飞行器的动力学模型,并研究了飞行器的时变惯性效应.郭建国等[7 ] 利用Newton-Euler方法建立了非对称伸缩翼变形飞行器的动力学模型,并进行了动态特性分析. Seigler等[8 ] 使用Kane方法对建立了大型变形飞行器的六自由度非线性动力学模型.Obradovic等[9 ] 在考虑气动性能和惯性性能变化的情况系使用Kane方法建立了变形飞行器的六自由度非线性模型.Zhu等[10 ] 使用Kane方法建立了变跨度变掠飞行器的六自由度非线性动力学模型.张杰等[11 ] 利用Kane方法建立了变展长变后掠飞行器的六自由度动力学模型,并进行了动态特性分析. ...
非对称伸缩翼飞行器动力学建模及特性分析
1
2016
... 常用于建立折叠翼飞行器多刚体动力学模型的方法主要有3种: Newton-Euler方法、Lagrange方程、Kane方法.Yue等[5 ] 使用Newton-Euler方法建立了折叠翼变形飞行器的六自由度非线性动力学模型,并对其进行解耦, 研究了飞行器的纵向动力学响应. Grant等[6 ] 利用Newton-Euler建立了变后掠飞行器的动力学模型,并研究了飞行器的时变惯性效应.郭建国等[7 ] 利用Newton-Euler方法建立了非对称伸缩翼变形飞行器的动力学模型,并进行了动态特性分析. Seigler等[8 ] 使用Kane方法对建立了大型变形飞行器的六自由度非线性动力学模型.Obradovic等[9 ] 在考虑气动性能和惯性性能变化的情况系使用Kane方法建立了变形飞行器的六自由度非线性模型.Zhu等[10 ] 使用Kane方法建立了变跨度变掠飞行器的六自由度非线性动力学模型.张杰等[11 ] 利用Kane方法建立了变展长变后掠飞行器的六自由度动力学模型,并进行了动态特性分析. ...
Modeling and flight control of large-scale morphing aircraft
1
2007
... 常用于建立折叠翼飞行器多刚体动力学模型的方法主要有3种: Newton-Euler方法、Lagrange方程、Kane方法.Yue等[5 ] 使用Newton-Euler方法建立了折叠翼变形飞行器的六自由度非线性动力学模型,并对其进行解耦, 研究了飞行器的纵向动力学响应. Grant等[6 ] 利用Newton-Euler建立了变后掠飞行器的动力学模型,并研究了飞行器的时变惯性效应.郭建国等[7 ] 利用Newton-Euler方法建立了非对称伸缩翼变形飞行器的动力学模型,并进行了动态特性分析. Seigler等[8 ] 使用Kane方法对建立了大型变形飞行器的六自由度非线性动力学模型.Obradovic等[9 ] 在考虑气动性能和惯性性能变化的情况系使用Kane方法建立了变形飞行器的六自由度非线性模型.Zhu等[10 ] 使用Kane方法建立了变跨度变掠飞行器的六自由度非线性动力学模型.张杰等[11 ] 利用Kane方法建立了变展长变后掠飞行器的六自由度动力学模型,并进行了动态特性分析. ...
Modeling of flight dynamics of morphing wing aircraft
1
2011
... 常用于建立折叠翼飞行器多刚体动力学模型的方法主要有3种: Newton-Euler方法、Lagrange方程、Kane方法.Yue等[5 ] 使用Newton-Euler方法建立了折叠翼变形飞行器的六自由度非线性动力学模型,并对其进行解耦, 研究了飞行器的纵向动力学响应. Grant等[6 ] 利用Newton-Euler建立了变后掠飞行器的动力学模型,并研究了飞行器的时变惯性效应.郭建国等[7 ] 利用Newton-Euler方法建立了非对称伸缩翼变形飞行器的动力学模型,并进行了动态特性分析. Seigler等[8 ] 使用Kane方法对建立了大型变形飞行器的六自由度非线性动力学模型.Obradovic等[9 ] 在考虑气动性能和惯性性能变化的情况系使用Kane方法建立了变形飞行器的六自由度非线性模型.Zhu等[10 ] 使用Kane方法建立了变跨度变掠飞行器的六自由度非线性动力学模型.张杰等[11 ] 利用Kane方法建立了变展长变后掠飞行器的六自由度动力学模型,并进行了动态特性分析. ...
Modeling and aerodynamic characteristics analysis of morphing aircraft
1
2017
... 常用于建立折叠翼飞行器多刚体动力学模型的方法主要有3种: Newton-Euler方法、Lagrange方程、Kane方法.Yue等[5 ] 使用Newton-Euler方法建立了折叠翼变形飞行器的六自由度非线性动力学模型,并对其进行解耦, 研究了飞行器的纵向动力学响应. Grant等[6 ] 利用Newton-Euler建立了变后掠飞行器的动力学模型,并研究了飞行器的时变惯性效应.郭建国等[7 ] 利用Newton-Euler方法建立了非对称伸缩翼变形飞行器的动力学模型,并进行了动态特性分析. Seigler等[8 ] 使用Kane方法对建立了大型变形飞行器的六自由度非线性动力学模型.Obradovic等[9 ] 在考虑气动性能和惯性性能变化的情况系使用Kane方法建立了变形飞行器的六自由度非线性模型.Zhu等[10 ] 使用Kane方法建立了变跨度变掠飞行器的六自由度非线性动力学模型.张杰等[11 ] 利用Kane方法建立了变展长变后掠飞行器的六自由度动力学模型,并进行了动态特性分析. ...
一种变体飞行器的动力学建模与动态特性分析
1
2015
... 常用于建立折叠翼飞行器多刚体动力学模型的方法主要有3种: Newton-Euler方法、Lagrange方程、Kane方法.Yue等[5 ] 使用Newton-Euler方法建立了折叠翼变形飞行器的六自由度非线性动力学模型,并对其进行解耦, 研究了飞行器的纵向动力学响应. Grant等[6 ] 利用Newton-Euler建立了变后掠飞行器的动力学模型,并研究了飞行器的时变惯性效应.郭建国等[7 ] 利用Newton-Euler方法建立了非对称伸缩翼变形飞行器的动力学模型,并进行了动态特性分析. Seigler等[8 ] 使用Kane方法对建立了大型变形飞行器的六自由度非线性动力学模型.Obradovic等[9 ] 在考虑气动性能和惯性性能变化的情况系使用Kane方法建立了变形飞行器的六自由度非线性模型.Zhu等[10 ] 使用Kane方法建立了变跨度变掠飞行器的六自由度非线性动力学模型.张杰等[11 ] 利用Kane方法建立了变展长变后掠飞行器的六自由度动力学模型,并进行了动态特性分析. ...
一种变体飞行器的动力学建模与动态特性分析
1
2015
... 常用于建立折叠翼飞行器多刚体动力学模型的方法主要有3种: Newton-Euler方法、Lagrange方程、Kane方法.Yue等[5 ] 使用Newton-Euler方法建立了折叠翼变形飞行器的六自由度非线性动力学模型,并对其进行解耦, 研究了飞行器的纵向动力学响应. Grant等[6 ] 利用Newton-Euler建立了变后掠飞行器的动力学模型,并研究了飞行器的时变惯性效应.郭建国等[7 ] 利用Newton-Euler方法建立了非对称伸缩翼变形飞行器的动力学模型,并进行了动态特性分析. Seigler等[8 ] 使用Kane方法对建立了大型变形飞行器的六自由度非线性动力学模型.Obradovic等[9 ] 在考虑气动性能和惯性性能变化的情况系使用Kane方法建立了变形飞行器的六自由度非线性模型.Zhu等[10 ] 使用Kane方法建立了变跨度变掠飞行器的六自由度非线性动力学模型.张杰等[11 ] 利用Kane方法建立了变展长变后掠飞行器的六自由度动力学模型,并进行了动态特性分析. ...
变体飞行器控制系统综述
1
2009
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
变体飞行器控制系统综述
1
2009
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
Design of LPV-based sliding mode controller with finite time convergence for a morphing aircraft
1
2017
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
H$\infty $ attitude control with initiative morphing strategy based on linearization for gull-wings
1
2017
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
Linear parameter-varying control of variable span-sweep morphing aircraft
1
2019
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
变体飞行器的非脆弱有限时间鲁棒控制器设计
1
2017
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
变体飞行器的非脆弱有限时间鲁棒控制器设计
1
2017
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
展向变形飞行器机翼扭转时的鲁棒飞行控制与分析
1
2014
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
展向变形飞行器机翼扭转时的鲁棒飞行控制与分析
1
2014
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
变体飞行器有限时间切换H_$\infty $跟踪控制
1
2018
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
变体飞行器有限时间切换H_$\infty $跟踪控制
1
2018
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
折叠翼飞行器多体动力学建模与控制. [博士论文]
1
2014
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
折叠翼飞行器多体动力学建模与控制. [博士论文]
1
2014
... 针对变体飞行器的控制, 国内外已有很多学者展开了研究.针对变体飞行器的控制方法,常用的方法是将变体非线性控制器的动力学模型利用小扰动原理进行线性化,得到变体飞行器的线性变参数(linear parameter varying, LPV)模型,然后设计控制器实现相应的控制目标[12 ] .Wen等[13 ] 提出了一种基于LPV方法有限时间收敛滑模控制策略,用于变形飞机在参数不确定和外界干扰下的稳定性控制. Guo等[14 ] 通过对动力学模型的线性化, 设计H$_{\infty}$跟踪控制器实现了鸥翼变形飞行器的跟踪控制.Lee等[15 ] 针对变跨度变掠飞行器设计了一种基于LPV模型的增益调度反馈控制器.程昊宇等[16 ] 在考虑存在有界干扰和控制器参数不确定性情况下,设计了基于LPV模型的非脆弱有限时间鲁棒控制器实现了变体飞行器的稳定控制.陶晓荣等[17 ] 基于LPV模型设计了鲁棒最优控制方法,实现了机翼机翼扭转变形跟踪控制.夏川等[18 ] 基于LPV模型设计了有限时间H$_{\infty }$跟踪控制.刘玮等[19 ] 设计了基于LPV模型的鲁棒变增益控制器实现折叠翼飞行器的稳定控制. ...
自抗扰控制技术
2
2007
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
... 根据纵向动态特性可知, 机翼折叠过程中,飞机的速度、攻角、俯仰角和高度均无法保持稳定,故需要设计稳定控制器进行变形过程中的稳定控制.自抗扰控制是韩京清提出的一种非线性控制方法[20 ] ,其原理是将系统外部扰动、参数摄动、未建模动态、系统内部各状态耦合影响等所有不确定因素都归结为系统总扰动并通过ESO进行实时估计,进而实现对扰动的补偿[33 ] . ...
自抗扰控制技术
2
2007
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
... 根据纵向动态特性可知, 机翼折叠过程中,飞机的速度、攻角、俯仰角和高度均无法保持稳定,故需要设计稳定控制器进行变形过程中的稳定控制.自抗扰控制是韩京清提出的一种非线性控制方法[20 ] ,其原理是将系统外部扰动、参数摄动、未建模动态、系统内部各状态耦合影响等所有不确定因素都归结为系统总扰动并通过ESO进行实时估计,进而实现对扰动的补偿[33 ] . ...
自抗扰控制器及其应用
2
1998
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
... [21 ]. ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
自抗扰控制器及其应用
2
1998
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
... [21 ]. ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
从PID技术到"自抗扰控制"技术
1
2002
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
从PID技术到"自抗扰控制"技术
1
2002
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
非线性连续二阶扩张状态观测器的分析与设计
1
2000
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
非线性连续二阶扩张状态观测器的分析与设计
1
2000
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
二阶扩张状态观测器的误差分析
1
1999
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
二阶扩张状态观测器的误差分析
1
1999
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
非线性自抗扰控制的收敛性. [博士论文]
1
2012
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
非线性自抗扰控制的收敛性. [博士论文]
1
2012
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
非线性跟踪-微分器
1
1994
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
非线性跟踪-微分器
1
1994
... LPV模型只适用于小扰动情况, 当飞行器做大角度机动时, 若仍采用此方法将严重影响控制精度甚至无法实现稳定控制. 自抗扰控制(active disturbance rejection control, ADRC)是由韩京清[20 ] 提出的一类非线性控制方法. ADRC[21 ] 主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性反馈控制律(nonlinear states error feedback, NLSEF)三部分组成[21 ] . ADRC的核心是ESO,ESO能够实时地对系统的内外干扰进行估计, 不依赖于系统的精确数学模型, 通过设计控制器能够将对内外干扰进行补偿, 从而得到等效的线性系统, 使用线性系统的控制方法就能够实现对整个系统的控制[22 ] . 自抗扰控制技术的稳定性证明是一个难点,2000年黄一和韩京清[23 ] 以二阶系统为例, 完成了扩张观测器的稳定性证明. 韩京清、张荣[24 ] 以二阶系统为例, 分析了扩张观测器的误差, 并且给出了提高扩张观测器精度的参数所应该满足的条件. 赵志良[25 ] 发现了韩京清和王伟[26 ] 对自抗扰控制器中的跟踪微分器证明的不合理之处,以二阶系统为例, 证明了跟踪微分器、扩张状态观测器、基于扩张状态观测器的反馈控制稳定性. ...
可变体飞行器的飞行协调控制问题研究. [硕士论文]
1
2012
... 本文以轻型飞机Navion L-17[27 ] 作为研究对象, 基于kane方法建立折叠翼飞行器的动力学模型. 如图1 所示, 假设左右机翼质量相同, 几何形状完全对称, 将机翼分为内翼和外翼,折叠时, 内翼相对机体折叠, 外翼相对机体始终保持水平. 机翼对称折叠,左右内翼折叠角大小为$\delta $, 如图2 所示. ...
可变体飞行器的飞行协调控制问题研究. [硕士论文]
1
2012
... 本文以轻型飞机Navion L-17[27 ] 作为研究对象, 基于kane方法建立折叠翼飞行器的动力学模型. 如图1 所示, 假设左右机翼质量相同, 几何形状完全对称, 将机翼分为内翼和外翼,折叠时, 内翼相对机体折叠, 外翼相对机体始终保持水平. 机翼对称折叠,左右内翼折叠角大小为$\delta $, 如图2 所示. ...
考虑附加质量的中心刚体-柔性梁系统的动力学特性研究
1
2018
... 将机体看作主刚体, 折叠翼看作从刚体, 整个系统可看由5个独立刚体组成的多刚体系统[28 ] , 质量为$m_i$ $(i=$ b, 1, 2, 3, 4), 其中, b表示机体, $1$表示左折叠翼内翼, $2$表示左折叠翼外翼, $3$表示右折叠翼内翼, $4$表示右折叠翼外翼, 总质量为$m$. ...
考虑附加质量的中心刚体-柔性梁系统的动力学特性研究
1
2018
... 将机体看作主刚体, 折叠翼看作从刚体, 整个系统可看由5个独立刚体组成的多刚体系统[28 ] , 质量为$m_i$ $(i=$ b, 1, 2, 3, 4), 其中, b表示机体, $1$表示左折叠翼内翼, $2$表示左折叠翼外翼, $3$表示右折叠翼内翼, $4$表示右折叠翼外翼, 总质量为$m$. ...
1
2005
... 由于机翼折叠只改变飞行器的动力学方程, 并不改变飞行器的运动学方程和导航方程, 根据文献[29 ] 可得到飞行器的运动方程和导航方程, 此处不再赘述. ...
1
2005
... 由于机翼折叠只改变飞行器的动力学方程, 并不改变飞行器的运动学方程和导航方程, 根据文献[29 ] 可得到飞行器的运动方程和导航方程, 此处不再赘述. ...
伸缩翼飞机变形飞行的建模与滑模变增益控制
1
2015
... 式中, $\rho $表示空气密度 ; $S_{w} $表示机翼的参考面积; $c_{A}$表示平均气动弦长; $C_{L} $, $C_{D} $和$C_{m}$分别表示升力系数、阻力系数和俯仰力矩系数, 与攻角$\alpha $、舵偏角$\delta _{e}$之间的线性函数关系可近似表示为[30 ] ...
伸缩翼飞机变形飞行的建模与滑模变增益控制
1
2015
... 式中, $\rho $表示空气密度 ; $S_{w} $表示机翼的参考面积; $c_{A}$表示平均气动弦长; $C_{L} $, $C_{D} $和$C_{m}$分别表示升力系数、阻力系数和俯仰力矩系数, 与攻角$\alpha $、舵偏角$\delta _{e}$之间的线性函数关系可近似表示为[30 ] ...
近空间高超声速飞行器气动特性研究的若干关键问题
1
2018
... 折叠翼飞行器在变形过程中, 其受到的气动力和力矩会随着折叠角变化而发生大幅变化[31 ] ,为了在后续控制器设计与数值仿真中准确模拟气动, 需要首先计算得到不同折叠角对应的气动数据并拟合出关于折叠角的函数.DATCOM软件能够利用飞行器的外形快速得到大量气动参数, 计算便捷, 适用于飞行器的理论验证阶段. 使用DATCOM软件,通过改变机身外的半翼展SSPNE、理论半翼展SSPN、内翼后掠角SAVSI和内翼上反角DHDADI来实现机翼的折叠[3 ] ,计算参数计算见表1 (表中 1 ft = 30.48 cm). ...
近空间高超声速飞行器气动特性研究的若干关键问题
1
2018
... 折叠翼飞行器在变形过程中, 其受到的气动力和力矩会随着折叠角变化而发生大幅变化[31 ] ,为了在后续控制器设计与数值仿真中准确模拟气动, 需要首先计算得到不同折叠角对应的气动数据并拟合出关于折叠角的函数.DATCOM软件能够利用飞行器的外形快速得到大量气动参数, 计算便捷, 适用于飞行器的理论验证阶段. 使用DATCOM软件,通过改变机身外的半翼展SSPNE、理论半翼展SSPN、内翼后掠角SAVSI和内翼上反角DHDADI来实现机翼的折叠[3 ] ,计算参数计算见表1 (表中 1 ft = 30.48 cm). ...
大型柔性航天器动力学与振动控制研究进展
1
2019
... 为了研究机翼折叠过程中飞行参数的变化, 对飞行器的纵向运动响应进行仿真[32 ] . 仿真初始条件为: 高度4000 m,速度0.4 Ma, 分别使机翼以$2(^{\circ}$)/s, $5(^{\circ}$)/s, $10(^{\circ}$)/s的折叠角速度折叠$60^\circ$, 研究纵向动力学状态变量在变形过程中的变化. 根据数值仿真, 可以得到飞行参数变化图如图3 ~图8 所示. ...
大型柔性航天器动力学与振动控制研究进展
1
2019
... 为了研究机翼折叠过程中飞行参数的变化, 对飞行器的纵向运动响应进行仿真[32 ] . 仿真初始条件为: 高度4000 m,速度0.4 Ma, 分别使机翼以$2(^{\circ}$)/s, $5(^{\circ}$)/s, $10(^{\circ}$)/s的折叠角速度折叠$60^\circ$, 研究纵向动力学状态变量在变形过程中的变化. 根据数值仿真, 可以得到飞行参数变化图如图3 ~图8 所示. ...
超低空重装空投纵向自抗扰控制
1
2017
... 根据纵向动态特性可知, 机翼折叠过程中,飞机的速度、攻角、俯仰角和高度均无法保持稳定,故需要设计稳定控制器进行变形过程中的稳定控制.自抗扰控制是韩京清提出的一种非线性控制方法[20 ] ,其原理是将系统外部扰动、参数摄动、未建模动态、系统内部各状态耦合影响等所有不确定因素都归结为系统总扰动并通过ESO进行实时估计,进而实现对扰动的补偿[33 ] . ...
超低空重装空投纵向自抗扰控制
1
2017
... 根据纵向动态特性可知, 机翼折叠过程中,飞机的速度、攻角、俯仰角和高度均无法保持稳定,故需要设计稳定控制器进行变形过程中的稳定控制.自抗扰控制是韩京清提出的一种非线性控制方法[20 ] ,其原理是将系统外部扰动、参数摄动、未建模动态、系统内部各状态耦合影响等所有不确定因素都归结为系统总扰动并通过ESO进行实时估计,进而实现对扰动的补偿[33 ] . ...
非线性连续二阶扩张状态观测器的分析与设计
1
2000
... 对于上述定义的函数$V_1 $, 根据文献[34 ] 可得到如下定理 ...
非线性连续二阶扩张状态观测器的分析与设计
1
2000
... 对于上述定义的函数$V_1 $, 根据文献[34 ] 可得到如下定理 ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}