引言
柔性梁的动力学广泛存在于力学系统当中, 其研究发展不断与固体力学、流体力学、非线性动力学、生物力学等其他学科进行交叉[1 -4 ] . 几何精确梁模型作为容许大范围运动、大变形的柔性梁的理想模型, 自提出后在分析、数值、应用等方向吸引了大量关注[5 -11 ] . 在柔性机器人的运动控制[12 -13 ] 、 DNA动力学的研究[14 ] 中有广泛的应用.
在几何精确梁的数值算法方面, 传统数值格式直接离散动力学方程, 可以实现连续系统的计算仿真, 但是很难保持系统内在的对称性、守恒性等物理特性, 如能量、动量等. Marsden等[15 ] 提出的变分积分子是一种从Lagrange函数出发, 通过离散变分原理直接得到保结构数值格式的方法. Demoures等[16 ] 提出的几何精确梁的李群积分子和李代数积分子可以自然保持能量动量, 但没有充分利用系统对称性, 对于几何精确梁等对称性很强的系统离散格式复杂程度很高. 在此基础上, Ball等[17 ] 对有限维系统提出了Hamel变分积分子, 主要适用于带对称性的约束力学系统, 特别是带对称性的非完整约束力学系统. Shi等[18 -20 ] 进一步应用无穷维几何中的活动标架法结合变分原理, 得到约束无穷维力学系统和经典场论中刻画运动的标准型—Hamel 形式, 进而得到能用于经典场论动力学计算的保结构格式—Hamel场变分积分子. Hamel 场变分积分子可以无需额外的Lagrange乘子来求解无穷维约束力学系统, 特别是非完整力学系统. 其是一种分布式算法, 每一次计算只需利用待计算点周围的信息, 具有计算效率高的特点. 王亮等[7 ] 将Hamel场变分积分子应用于几何精确梁, 并通过数值算法验证了Hamel场变分积分子能长时间保结构的特征.
保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性.
对Hamel变分积分子的现有研究结果在数值上充分表现出了其对非线性系统, 包括有限维系统、无穷维系统、完整系统与非完整系统, 长时间动力学行为的良好预测[7 , 17 , 20 ] . 本文以几何精确梁为例, 利用离散Noether定理, 研究了Hamel场变分积分子的保动量性质, 以期为进一步研究其保结构性质提供参考依据.
1 几何精确梁的动力学模型
考虑一个在空间中运动的质量均匀的弹性梁. 设$\{ E_1, E_2, E_3\}$为物质标架的一组基, 初始时刻梁沿$ E_2$轴水平自然放置(无弹性形变), 一端位于原点(见图1 ). 设梁长为$l$, 密度为$\rho $, 截面面积为$A$ 的正方形.
图1
图1
几何精确梁初始位形
Fig.1
Initial configuration of a geometrically exact beam
在几何精确梁的模型中, 梁的截面做刚体运动, 其位形可由
$ { g} = \begin{pmatrix} {\varLambda}&{\varphi} \\{\bf0} & {\bf1} \end{pmatrix} \in SE(3) $
描述, 其中$ \varphi :{\bf R}\times[0,l]\rightarrow {\bf R}^3$ 为中线位置函数, $ \varLambda:{\bf R}\times [0,l] \rightarrow SO(3)$ 为截面旋转矩阵. 引入对流速度
(1) ${\zeta} = { g}^{-1} \dot { g} = ({\omega}, {\pi})^T$
(2) ${\gamma} = { g}^{-1}{ g}' - e_2 = ( \varOmega , \varPi )^T$
其中顶标$\cdot$和上标$'$分别表示对时间变量$t$和空间变量$s$求导, $ e _2$为$ E_2$ 方向的单位向量. 此处利用了李代数$\mathfrak{se}(3)$与${\bf R}^6$的等同. 对流速度$\zeta$包含了截面运动的角速度$\omega$和平移速度$\pi$的信息, 对流应变包含了弹性拉伸、弯曲和剪切信息. 从而, 几何精确梁的Lagrange密度可写作
$L(\zeta, \gamma) = \frac12 [\langle {\mathcal{K}}\zeta, \zeta \rangle - \langle {\mathcal{P}\gamma}, \gamma\rangle]$
其中$\langle \cdot, \cdot \rangle$为$\mathfrak{se}^\ast (3)$与$\mathfrak{se}(3)$配对, $\mathcal{K}$, $\mathcal{P}$分别为常对角阵.
$\mathcal{L} = \int_a^b \int^l_0 \frac12 [\langle {\mathcal{K} \zeta}, \zeta \rangle - \langle {\mathcal{P}\gamma}, \gamma \rangle] dsdt$
令$\eta = { g}^{-1} \Delta { g} $为独立变分, 易知$\eta$与$\zeta$, $\gamma$满足如下变分公式[20 ]
(3) $\Delta \zeta = {\dot \eta} + [\zeta, \eta]$
(4) $\Delta \gamma = \eta' + [\gamma+ e_2, \eta]$
其中$[\cdot , \cdot]$为$\mathfrak{se}(3)$上的李括号.
根据变分公式和Hamilton原理, 计算得到自由几何精确梁的动力学方程
$\frac{\partial }{\partial t} {\mathcal{K} \zeta} - \frac{\partial }{\partial s} {\mathcal{P} \gamma}- [\zeta, {\mathcal{K} \zeta}]^\ast + [ \gamma + e_2, {\mathcal{P}\gamma}]^\ast = {\bf0}$
$\gamma(t,0) = \gamma(t,l) = 0, \forall t\in (a,b)$
其中$[\cdot,\cdot]^\ast $为$\mathfrak{se}(3)$李括号$[\cdot , \cdot]$的对偶括号. 同时, 由式(1)和式(2) 可知, $ \zeta$和$ \gamma$满足相容性条件
(5) $\frac{\partial }{\partial t} \gamma - \frac{\partial }{\partial s} \zeta = [\gamma + e_2, \zeta]$
相容性条件描述了对流速度和对流应变生成的分布的可积性. 在场论框架下, 位形$ g$ 是以时空为底流形, 纤维为的主丛$SE(3)$的截面, 相容性条件在几何上可解释为主丛的局部平坦性条件. 对一般纤维丛情况下的相容性条件的讨论参见文献[19 ]. 对于给定初始条件和边界条件的几何精确梁, 其运动由动力学方程(3)和相容性条件(5) 共同确定, 将式(3)和式(5)构成的方程组称为几何精确梁的Hamel场方程组[18 -19 ] .
2 几何精确梁Hamel场变分积分子
通过离散Hamilton原理得到Hamel场变分积分子. 设离散梁的空间节点数为$K$, 空间步长为$\Delta h$, 时间步数为$N$, 时间步长为$\Delta t$. 梁的位形由序列$\{ g^n_j\} $, $n = 0,1,2,\cdots ,N-1,\ j = 1,2,\cdots ,K$ 描述, $ g^n_j$表示在$n$时刻第$j$ 个截面的位形. 分别定义离散对流速度$\zeta^{n+1/2}_j$和离散对流应变$\gamma^n_{j+1/2}$如下
(6) ${ g}^{n+1}_j = { g}^n_j\exp(\Delta t\zeta^{n+1/2}_j),\ \ { g}^n_{j+1} = { g}^n_j\exp(\Delta h \gamma^n_{j+1/2})$
由于指数映射$\exp:\mathfrak{se}(3) \to SE(3)$是局部微分同胚, 在$\exp:\mathfrak{se}(3) \to SE(3)$与${ g}^{n+1}_j$相距较近, 即$({ g}^n_j)^{-1}{ g}^{n+1}_j$在$\exp$的值域中时, 上式唯一确定了离散对流速度, 离散对流应变的情形类似. 从而, 离散Lagrange密度为
(7) $L^d(\zeta^{n+1/2}_{j},\gamma^n_{j+1/2}) = \\ \frac12 [\langle {\mathcal K \zeta}^{n+1/2}_{j}, \zeta^{n+1/2}_{j} \rangle - \langle {\mathcal P \gamma}^n_{j+1/2}, \gamma^n_{j+1/2} \rangle]$
$A^d = \Delta t\Delta h\sum_{n=0}^{N-1} \sum_{j=0}^{K}\frac12 \Big[\Big\langle {\mathcal K\zeta}^{n+1/2}_{j}, \zeta^{n+1/2}_{j} \Big\rangle - \\ \Big\langle {\mathcal P\gamma}^n_{j+1/2}, \gamma^n_{j+1/2} \Big\rangle\Big]$
注: 上式中第一项的求和范围应为$n=0,1,2,\cdots ,N-1,\ j = 1,2,\cdots ,K$, 第二项的求和范围应为$n=1,2,\cdots ,N-1,\ j = 0,1,2,\cdots ,K$. 为了后续计算表达式的简洁, 本文将上式求和范围统一写为$n=0,1,2,\cdots ,N-1,\ j = 0,1,2,\cdots ,K$, 将指标溢出的变量统一记为$0$.
定义离散变分$\eta^n_j = ({ g}^n_j)^{-1}\Delta { g}^n_j$. 利用离散变分原理可以得到结论[20 ] :
离散变分原理$\Delta A^d = 0$成立当且仅当$\Big\{\zeta^{n+1/2}_j\Big\}$, $\Big\{\gamma^n_{j+1/2}\Big\}$ 满足离散Hamel场方程
(8) $\begin{align} \frac{1}{\Delta t} {\mathcal K} \Big(\zeta^{n+1/2}_j-\zeta^{n-1/2}_j \Big) - \frac{1}{\Delta h} {\mathcal P} \Big (\gamma^n_{j+1/2} - \gamma^n_{j-1/2} \Big )- \\ \frac12 \Big[\zeta^{n+1/2}_j,{\mathcal K }\zeta^{n+1/2}_j \Big ]^\ast -\frac12 \Big [\zeta^{n-1/2}_j, {\mathcal K\zeta}^{n-1/2}_j\Big ]^\ast + \\ \frac12 \Big[\gamma^n_{j+1/2} + e_2, {\mathcal P \gamma}^n_{j+1/2}\Big]^\ast + \\ \frac12 \Big[\gamma^n_{j-1/2} + e_2, {\mathcal P \gamma}^n_{j-1/2} \Big ]^\ast = 0 \end{align}$
(9) $\gamma^n_{1/2} = \gamma^n_{K+1/2} =0$
(10) $\begin{align} \frac{1}{\Delta t} (\gamma^{n+1}_{j+1/2} - \gamma^{n}_{j+1/2} ) - \frac{1}{\Delta h} (\zeta^{n+1/2}_{j+1} - \zeta^{n+1/2}_{j} )= \\ \left[\frac {1}{2} (\gamma^{n}_{j+1/2}+\gamma^{n+1}_{j+1/2} + 2 e_2), \frac{1}{2} ( \zeta^{n+1/2}_{j} + \zeta^{n+1/2}_{j+1} ) \right] \end{align}$
3 Hamel场变分积分子保动量性质
本节首先证明自由的(不受外力、外力矩)的几何精确梁系统具有动量守恒性质, 随后通过离散Noether定理[31 ] 证明Hamel场变分积分子可以保持精确离散动量.
根据经典力学理论, 一个不受外力(矩)的完整力学系统总动量保持不变, 故自由运动的几何精确梁系统具有动量守恒性质. 动量守恒往往是在空间坐标下进行验证的, 由于Hamel场变分积分子是在活动标架下给出的, 为建立其离散动量守恒, 用活动标架表述的梁的动量.
根据Noether定理, 令 $\phi :[a,b]\times[0,l]\times (-\epsilon_0, \epsilon_0) \to {\bf R},\ \epsilon_0 >0$为任意一个以时空和变分变量为自变量的$C^1$光滑的函数, 并且满足$\phi (a,s,\epsilon) = \phi (b,s,\epsilon) = \phi (t,0,\epsilon)=\phi (t,l,\epsilon)=\phi (t,s,0) = 0, \ \forall t\in [a,b], \ \forall s\in [0,l]$.取定李代数中任意一个元素$\xi \in \mathfrak{se}(3)$, 构造变分曲线
$\widetilde { g}(t,s,\epsilon) = \exp(\phi (t,s,\epsilon)\xi) { g}(t,s)$
其中${ g}(t,s)$为Hamel场方程的任意一个精确解. 下文中均用 $ \widetilde{}$ 表示变量依赖于变分参数$\epsilon$. 于是$\widetilde { g}$的偏导数和无穷小变分$\Delta { g}$ 可分别写作
$\dot{\widetilde { g}} = \exp(\phi \xi) \dot { g} + \exp(\phi \xi) \dot{\phi } \xi { g} $
$\widetilde { g} '= \exp(\phi \xi) { g}'+ \exp(\phi \xi) \phi ' \xi { g} $
$\Delta { g} = \frac{\partial }{\partial \epsilon}\Big|_{\epsilon=0}\widetilde { g}(t,s,\epsilon) = \phi \xi { g}$
从而, 变分曲线对应的对流速度、对流应变和体坐标系下的变分分别为
${\widetilde \zeta} = \widetilde { g }^{-1} \dot{\widetilde { g}} = \zeta + \dot \phi \mbox{Ad}_{{ g}^{-1}}\xi $
${\widetilde \gamma} = \widetilde { g }^{-1} {\widetilde { g }'} = \gamma + \phi '\mbox{Ad}_{{ g}^{-1}}\xi$
$\eta = \Delta \phi \mbox{Ad}_{{ g }^{-1}}\xi.$
$\begin{align} 0 = \Delta \mathcal{L} =\Delta \int_a^b \int^l_0 \frac12 \Big[\Big\langle {\mathcal K \widetilde \zeta}, {\widetilde \zeta} \Big\rangle - \Big\langle{ \mathcal P \widetilde \gamma}, {\widetilde \gamma}\Big\rangle\Big] dsdt = \\ \int_a^b \int^l_0 \Big[\Big\langle {\mathcal K \zeta}, \Delta { \widetilde \zeta} \Big\rangle - \Big\langle {\mathcal P\gamma}, \Delta {\widetilde \gamma}\Big\rangle\Big]dsdt = \\ \int_a^b \int^l_0 \Big[\Big\langle {\mathcal K \zeta},\Delta \zeta + \Delta {\dot\phi }\mbox{Ad}_{{ g}^{-1}}\xi \Big\rangle - \\ \Big\langle {\mathcal P\gamma}, \Delta \gamma + \Delta \phi '\mbox{Ad}_{{ g}^{-1}}\xi\Big\rangle\Big] dsdt \end{align}$
$\begin{align} 0 = \int_a^b \int^l_0 \Big[\Big\langle {\mathcal K \zeta}, \Delta {\dot\phi }\mbox{Ad}_{{ g}^{-1}}\xi \Big\rangle-\Big\langle {\mathcal P\gamma}, \Delta \phi '\mbox{Ad}_{{ g}^{-1}}\xi\Big\rangle\Big]dsdt \\ = \int_a^b \int^l_0 \bigg\langle -\frac{\partial }{\partial t} \Big(\mbox{Ad}^\ast _{{ g}^{-1}} {\mathcal K\zeta}\Big) + \\ \frac{\partial }{\partial s}\Big(\mbox{Ad}^\ast _{{ g}^{-1}} {\mathcal P\gamma}\Big) ,\xi \bigg\rangle \Delta \phi dsdt \end{align}$
其中$\text{Ad}^\ast $表示$\text{Ad}$算子的伴随算子. 由于$\Delta \phi $和$\xi$ 的任意性可知
(11) $-\frac{\partial }{\partial t} \Big(\mbox{Ad}^\ast _{{ g}^{-1}} {\mathcal K \zeta}\Big) + \frac{\partial }{\partial s}\Big(\mbox{Ad}^\ast _{{ g}^{-1}} {\mathcal P\gamma}\Big) = 0$
此式为场论框架下的动量律. 进一步, 对式(11)在$[0,l]$上积分, 利用空间边界条件(4) 可以得到
(12) $\int_0^l \mbox{Ad}^\ast _{{ g}^{-1}} {\mathcal K \zeta} ds = \mbox{constant vector}$
即系统总动量守恒. 将此表达式改写到空间坐标系中, 即可得到角动量守恒和平动动量守恒的经典表达式. 下面, 在上述连续情形动量守恒证明的基础上, 利用离散Noether定理进一步证明Hamel变分积分子也可以自然保持系统离散动量. 定义变分序列
(13) $\widetilde { g}^n_j = \exp(\phi _j^n(\epsilon) \xi){ g}^n_j$
其中$\phi _j ^n(\epsilon)$为依赖于时空节点的变分参数的$C^1$光滑函数, 且满足
$\phi _j^0(\epsilon) = \phi _j^{N-1}(\epsilon) = \phi _1^n(\epsilon)= \phi _K^n(\epsilon)=\phi _j^n(0) = 0$
$\xi \in \mathfrak{se}(3)$为李代数中任一给定元素. 定义$\Big\{ {\widetilde g}^n_j \Big\}$的离散对流速度$\Big\{\widetilde {\zeta}^{n+1/2}_j\Big\}$和离散对流应变$\Big\{\widetilde{ \gamma}^{n}_{j+1/2}\Big\}$ 为
(14) $\widetilde { g}^{n+1}_j = \widetilde { g}^n_j \exp\Big(\Delta t{\widetilde \zeta}^{n+1/2}_j\Big),\ \widetilde { g}^n_{j+1} = \widetilde { g}^n_j \exp\Big(\Delta h{\widetilde \gamma}^{n}_{j+1/2}\Big)$
$\eta^n_j = { ({{ g}^n_j})^{-1}\Delta { g}^n_j} = \Delta \phi _j^n(\epsilon)\text{Ad}_{({{ g}^n_j})^{-1}}\xi$
根据式(13)和式(14)和BCH公式[32 ] 可知
$\begin{align} \widetilde { g}^{n+1}_j =\exp(\phi _j^{n+1}\xi ){ g}^{n+1}_j = \\ \exp(\phi _j^{n+1} \xi ){ g}^n_j \exp(\Delta t \zeta^{n+1/2}_j ) = \\ \exp[(\phi _j^{n+1} - \phi _j^n ) \xi ]\widetilde { g}^n_j \exp(\Delta t \zeta^{n+1/2}_j ) = \\ \widetilde { g}^n_j \exp[(\phi _j^{n+1} - \phi _j^n ) \text{Ad}_{({\widetilde { g}^n_j} )^{-1}}\xi ]\exp(\Delta t \zeta^{n+1/2}_j ) = \\ \widetilde { g}^n_j \exp\Big[\Delta t \zeta^{n+1/2}_j+(\phi _j^{n+1} - \phi _j^n ) I(\Delta t \zeta^{n+1/2}_j )\cdot \\ \text{Ad}_{({\widetilde { g}^n_j} )^{-1}}\xi +o(\epsilon )\Big] \end{align}$
其中算子$I: \mathfrak{se}(3)\to \mathfrak{se}(3)^\ast $为
$\mathcal{T}(X) = \sum_{k\geqslant 0}\frac{(-1)^k}{k+1}[\exp(\Delta t \text{ad} X)-I]^k, \ X\in \mathfrak{se}(3)$
$\widetilde { g}^n_{j+1} = \widetilde { g}^n_j \exp[\Delta h \gamma^n_{j+1/2}+(\phi _{j+1}^n - \phi _j^n) I(\Delta h \gamma^n_{j+1/2})\cdot \\ \text{Ad}_{({\widetilde { g}^n_j})^{-1}}\xi +o(\epsilon)]$
故可知当$\Delta t$$\epsilon $充分小时, ${\widetilde \zeta}^{n+1/2}_j$ 与$\zeta^{n+1/2}_j$, 及${\widetilde \gamma}^{n}_{j+1/2}$ 与$\gamma^{n}_{j+1/2}$ 存在如下关系
(15) $\widetilde \zeta^{n+1/2}_j = \zeta^{n+1/2}_j+ \frac{(\phi _j^{n+1} - \phi _j^n ) }{\Delta t}I(\Delta t \zeta^{n+1/2}_j )\cdot \\ \text{Ad}_{({\widetilde { g}^n_j} )^{-1}}\xi +o(\epsilon )$
(16) ${\widetilde \gamma}^{n}_{j+1/2} = \gamma^{n}_{j+1/2}+ \frac{(\phi ^n_{j+1} - \phi ^n_j ) }{\Delta h}I(\Delta h \gamma^n_{j+1/2} )\cdot \\ \text{Ad}_{({\widetilde { g}^n_j} )^{-1}}\xi +o(\epsilon )$
根据离散Noether定理, 将变分序列代入离散Lagrange 密度并对其作用和变分, 得到
$\begin{align} 0=\Delta {A}^d = \\ \Delta t\Delta h \Delta \sum_{n=0}^{N-1} \sum_{j=0}^{K} \frac12 \bigg[\bigg\langle {\mathcal K \widetilde \zeta}^{n+1/2}_j, {\widetilde \zeta}^{n+1/2}_j \bigg\rangle - \\ \bigg\langle {\mathcal P \widetilde \gamma}^n_{j+1/2}, {\widetilde \gamma}^n_{j+1/2}\bigg\rangle \bigg] = \\ \Delta t\Delta h \sum_{n=0}^{N-1} \sum_{j=0}^{K}\bigg[\bigg \langle {\mathcal K \zeta}^{n+1/2}_j, \Delta {\widetilde \zeta}^{n+1/2}_j \bigg\rangle - \\ \bigg\langle {\mathcal P \gamma}^n_{j+1/2}, \Delta {\widetilde \gamma}^n_{j+1/2} \bigg\rangle \bigg] = \\ \Delta t\Delta h \sum_{n=0}^{N-1} \sum_{j=0}^{K}\bigg[\bigg\langle {\mathcal K \zeta}^{n+1/2}_j, \Delta \zeta^{n+1/2}_j + \\ \frac{\Delta \phi _j^{n+1} - \Delta \phi _j^n}{\Delta t} \left (I\left (\Delta t \zeta^{n+1/2 }_j \right )\text{Ad}_{({ g^n_j})^{-1}}\xi \right )\bigg\rangle - \\ \bigg\langle {\mathcal P \gamma}^n_{j+1/2}, \Delta \gamma^n_{j+1/2} +\frac{\Delta \phi ^n_{j+1} - \Delta \phi ^n_j}{\Delta h}\cdot \\ I(\Delta h \gamma^n_{j+1/2})\text{Ad}_{({{ g}^n_j})^{-1}}\xi \bigg\rangle \bigg] \end{align}$
其中最后一个等式利用了变分的定义, 可知小量$o(\epsilon)$的变分为零. 将离散Hamel方程代入上式可得
$\begin{align} 0=\Delta t\Delta h \sum_{n=0}^{N-1} \sum_{j=0}^{K} \bigg\langle {\mathcal K \zeta}^{n+1/2}_j, \frac{\Delta \phi _j^{n+1} - \Delta \phi _j^n}{\Delta t}\cdot \\ \left (I\left (\Delta t \zeta^{n+1/2 }_j \right )\text{Ad}_{({{ g}^n_j})^{-1}}\xi \right)\bigg\rangle - \\ \left \langle {\mathcal P \gamma}^n_{j+1/2},\frac{\Delta \phi ^n_{j+1} - \Delta \phi ^n_j}{\Delta h}I(\Delta h \gamma^n_{j+1/2})\text{Ad}_{({{ g}^n_j})^{-1}}\xi \right \rangle = \\ \Delta t \Delta h \sum_{n=0}^{N-1} \sum_{j=0}^{K} \frac{\Delta \phi _j^{n+1} - \Delta \phi _j^n}{\Delta t}\cdot \\ \left \langle \text{Ad}^\ast _{({ { g}^n_j})^{-1}} I^\ast \left (\Delta t \zeta^{n+1/2 }_j \right ){ \mathcal K \zeta}^{n+1/2}_j, \xi \right \rangle - \\ \frac{\Delta \phi _{j+1}^n - \Delta \phi _j^n}{\Delta h} \left \langle \text{Ad}^\ast _{({ { g}^n_j})^{-1}} I^\ast \left (\Delta h \gamma^n_{j+1/2} \right ) {\mathcal P \gamma}^n_{j+1/2}, \xi \right \rangle= \\ \Delta t \Delta h\sum_{n=1}^{N} \sum_{j=1}^{K} \Delta \phi ^n_j \bigg\langle \text{Ad}^\ast _{({ { g}^{n-1}_j})^{-1}} I^\ast \left (\Delta t \zeta^{n-1/2 }_j \right ) {\mathcal K \zeta}^{n-1/2}_j - \\ \text{Ad}^\ast _{({ { g}^n_j})^{-1}} I^\ast \left(\Delta t \zeta^{n+1/2 }_j \right ) {\mathcal K \zeta}^{n+1/2}_j , \xi \bigg \rangle - \\ \Delta \phi ^n_j \bigg\langle \text{Ad}^\ast _{({ { g}^n_{j-1}})^{-1}} I^\ast \left (\Delta h \gamma^n_{j-1/2} \right ) {\mathcal P \gamma}^n_{j-1/2} - \\ \text{Ad}^\ast _{({ { g}^n_j})^{-1}} I^\ast \left (\Delta h \gamma^n_{j+1/2} \right ) {\mathcal P \gamma}^n_{j+1/2} , \xi \bigg \rangle \end{align}$
对任意给定的$\xi$, 由于$\Delta \phi _j^n$的任意性可知
$\begin{align} \frac{1}{\Delta t}\bigg[\text{Ad}^\ast _{({ { g}^{n-1}_j})^{-1}} I^\ast \left (\Delta t \zeta^{n-1/2 }_j \right ) {\mathcal K \zeta}^{n-1/2}_j - \\ \text{Ad}^\ast _{({ { g}^n_j})^{-1}} I^\ast \left (\Delta t \zeta^{n+1/2 }_j \right ) {\mathcal K \zeta}^{n+1/2}_j\bigg] - \\ \frac{1}{\Delta s}\bigg[\text{Ad}^\ast _{({ { g}^n_{j-1}})^{-1}} I^\ast \left (\Delta h \gamma^n_{j-1/2} \right ) {\mathcal P \gamma}^n_{j-1/2} + \\ \text{Ad}^\ast _{({ { g}^n_j})^{-1}} I^\ast \left (\Delta h \gamma^n_{j+1/2} \right ){ \mathcal P \gamma}^n_{j+1/2}\bigg]= 0 \end{align}$
上式对$j$在$1,2,\cdots ,K$上求和并用离散边界条件(9)可得
$\sum_{j=1}^{K} \text{Ad}^\ast _{({ { g}^n_j})^{-1}} I^\ast \left (\Delta t \zeta^{n+1/2 }_j \right ){\mathcal K \zeta}^{n+1/2}_j = \text{constant vector}$
几何精确梁的Hamel场变分积分子(8)和(10)在边界条件(9)下满足如下定义的离散动量守恒
$J_d:= \Delta h \sum_{j=1}^{K} \text{Ad}^\ast _{({ { g}^n_j})^{-1}} I^\ast \left (\Delta t \zeta^{n+1/2 }_j \right ){\mathcal K \zeta}^{n+1/2}_j$
即随着离散系统的演化轨迹$\Big( g^{n-1}_j$, $\zeta^{n-1/2}_j\Big)$ $\to$ $\Big( g^n_j,$ $\zeta^{n+1/2}_j\Big)$ 是守恒的.
$J_d$表达式中级数的存在技术上是李代数$\mathfrak{se}(3)$非交换性在BCH公式中的反映, 而根本上由于在Hamel框架下, 离散对流速度$\zeta^{n+1/2}_j$处于位形${ g}^n_j$与${ g}^{n+1}_j$之间, 故位形和离散对流速度值无法完全匹配, 需离散动量表达式中出现级数来弥补. 这种不匹配对于Hamel场变分积分子的构造是必要的, 可以使所得变分积分子具有更高精度[20 ] . 值得注意的是, 上式中的离散动量可以展开为
$J_d = \Delta h \sum_{j=1}^{K} \text{Ad}^\ast _{({ { g}^n_j})^{-1}} {\mathcal K \zeta}^{n+1/2}_j +O(\Delta t)$
这里的首项可作为连续动量(11)的直接离散, 从而Hamel变分积分子在$O(\Delta t)$ 误差范围内可以保持此离散动量的首项[7 ] .
4 算例
下面通过两个例子分别从分析和数值角度验证上述结论.
例一 考虑一个沿$ E_3$方向以$ v_0$初速度做匀速直线运动的几何精确梁, 不妨设梁长$l = 1$ , 梁的质量和转动惯量均为1, 那么系统总动量非零分量为$J_lin3= v_0$.
$g = \begin{pmatrix} 1& 0 & 0 &0 \\ 0 & 1 & 0 & y \\0 & 0 & 1 & z \\0 &0 &0 & 1 \end{pmatrix}$
其中$y$, $z$分别为截面中线在$ E_2$, $ E_3$ 方向的坐标. 从而对流速度有表达式
$\zeta = \begin{pmatrix} 0& 0 & 0 &0 \\ 0 & 0 & 0 & 0 \\0 & 0 & 0 & \dot z \\0 &0 &0 & 0 \end{pmatrix} \in \mathfrak{se}(3)$
在$\mathfrak{se}(3)$与${\bf R}^6$的等同下, $\zeta = (0,0,0,0,0,\dot z)^T$. 令$ a = (0,0,0,0,0,1)^T$, 由式(12)可得系统在$ E_3$方向上的动量为
$ \langle\int_0^1 \mbox{Ad}^\ast _{{ g}^{-1}}{\mathcal K \zeta} ds , a \rangle = \langle \zeta , \mbox{Ad}_{{ g}^{-1}} a \rangle = \dot z = v_0$
考虑系统的离散动量, 由于在此场景下非平凡的对称群为沿$E_3$轴做平移运动的加法群, 指数映射$\exp$退化为线性映射, 于是可得
$\zeta^{n+1/2}_j = \frac{{ g}^{n+1}_j- g^n_j}{\Delta t}= \begin{pmatrix} 0& 0 & 0 &0 \\ 0 & 0 & 0 & 0 \\0 & 0 & 0 & \dfrac{z^{n+1}_j-z^n_j}{\Delta t} \\0 &0 &0 & 0 \end{pmatrix}$
$\langle J_d, a \rangle = \Bigg\langle \Delta h \sum_{j=1}^{K} \text{Ad}^\ast _{({ { g}^n_j})^{-1}} {\mathcal K \zeta}^{n+1/2}_j +O(\Delta t) , a \Bigg\rangle = \\ \Big\langle \zeta^{n+1/2}_j, \text{Ad}_{({ { g}^n_j})^{-1}} a \Big\rangle +O(\Delta t) = \frac{z^{n+1}_j-z^n_j}{\Delta t}+O(\Delta t)$
例二 考虑初始位形如图1 所示的不受外力的几何精确梁. 其参数[33 ] 如下: 梁长 $l = 1$, 横截面是边长为$0.1$ 的正方形, 密度$\rho = 1000$, 杨氏模量 $E= 10^7$, 泊松比 $\nu = 0.35$.
取时间步长$\Delta t = 10^{-4}$ s, 空间节点数 $K = 10$, 给定梁的初始对流速度为
$\omega_1 = 0.1,\ \omega_2 = 1,\ \omega_3 = 0.2, \ \pi_3 = 0$
$\pi_1 =\left\{ \begin{array}{ll} 2, &\ \ \ \mbox{fifth and sixth sections}\\ 0, &\ \ \ \mbox{other sections} \end{array} \right.$
$\pi_2 =\left\{ \begin{array}{ll} 3,& \ \ \ \mbox{second and third sections}\\ 0,& \ \ \ \mbox{other sections} \end{array} \right.$
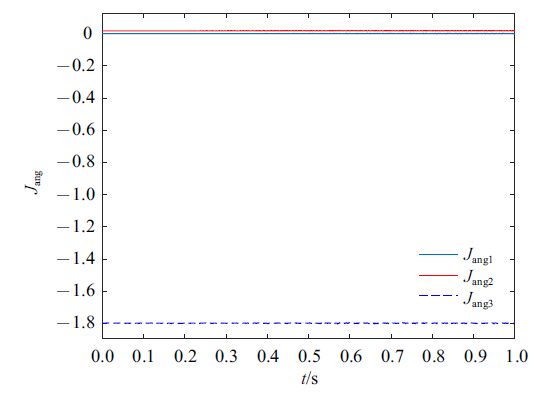
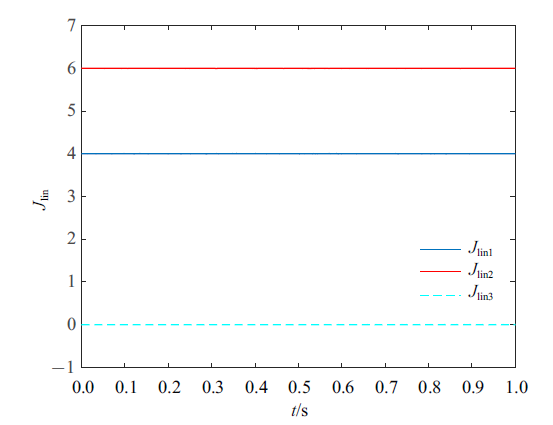
通过Hamel场变分积分子(8) $\sim$ (10)迭代计算10 000步, 得到几何精确梁的角动量和线动量如图2 和图3 所示, 说明了Hamel场变分积分子可以长时间以$O(\Delta t)$精度保持系统角动量和线动量.
图2
图2
梁的角动量
Fig.2
Evolution of angular momentum
图3
图3
梁的线动量
Fig.3
Evolution of linear momentum
5 结论
对于不受外力、外力矩的力学系统, 动量守恒是一个基本的守恒律. 对几何精确梁模型, 传统方法往往将其看作大量刚体的串联或位形空间为无穷维流形的无穷维力学系统来研究其动量, 而本文在协变场论观点下, 从时空角度用活动标架法研究Hamel场变分积分子的保动量性质, 进一步说明了Hamel场变分积分子保结构的性质, 同时也间接说明其具有长时间数值稳定性. 本文所给的证明方法也同样适用于一般经典场论场景下的Hamel 场变分积分子. 下一步将探究Hamel形式及变分积分子的保能量、保辛结构等保结构性质, 并将其应用到壳、膜等更复杂力学系统的建模与仿真中.
参考文献
View Option
[1]
Goriely A . The Mathematics and Mechanics of Biological Growth
New York: Springer , 2017
[本文引用: 1]
[2]
Moulton DE Lessinnes T Goriely A . Morphoelastic rods III: Differential growth and curvature generation in elastic filaments
Journal of the Mechanics and Physics of Solids 2020 , 142 : 10422
[3]
Ahn J Rail Z . A rod-beam system with dynamic contact and thermal exchange condition
Applied Mathematics and Computation 2021 , 388 : 125542
DOI
URL
[4]
孙加亮 , 田强 , 胡海岩 . 多柔体系统动力学建模与优化研究进展
力学学报 , 2019 , 51 (6 ): 1565 -1586
DOI
[本文引用: 1]
多柔体系统是由柔性部件和运动副组成的力学系统,在航空、航天、车辆、机械与兵器等众多工程领域具有广泛的应用前景, 其典型的代表包括柔性机械臂、直升机旋翼、卫星的可展开天线、太阳帆航天器等. 近年来,随着工程技术的发展,多柔体系统动力学问题日益突出,尤其是含变长度柔性部件的多柔体系统,不仅涉及其动力学 建模与计算,还涉及其动力学优化设计. 事实上,部件柔性对多柔体系统的动力学行为影响很大,直接影响到优化结果,因此需要发展基于多柔体系统动力学的优化设计方法. 本文首先阐述了多柔体系统动力学优化的研究背景及意义,简要回顾了多柔体系统动力学建模的3类方法:浮动坐标方法、几何 精确方法和绝对节点坐标方法,并介绍了含变长度柔性部件的多柔体系统动力学建模方法. 系统概述了多柔体系统动力学响应优化、动力学特性优化和动力学灵敏度分析3个方面的研究进展,并从尺寸优化、形状优化和 拓扑优化 3 个方面综述了多柔体系统部件优化的研究进展. 本文最后提出了在多柔体系统动力学优化研究中值得关注的若干问题.
(Sun Jialiang Tian Qiang Hu Haiyan . Advances in dynamic modeling and optimization of flexible multibody systems
Chinese Journal of Theoretical and Applied Mechanics 2019 , 51 (6 ): 1565 -1586 (in Chinese))
[本文引用: 1]
[5]
Rodriguez C . Networks of geometrically exact beams: Well-posedness and stabilization
Mathematical Control and Related Fields , doi:10.3934/mcrf.2021002
[本文引用: 1]
[6]
Yu M Nie X Yang G , et al . Fixed-point fluid structure interaction analysis based on geometrically exact approach
Scientific Reports 2020 , 10 : 1 -16
DOI
URL
[7]
王亮 , 安志朋 , 史东华 . 几何精确梁的Hamel场变分积分子
北京大学学报: 自然科学版 , 2016 , 52 (4 ): 692 -698
[本文引用: 3]
(Wang Liang An Zhipeng Shi Donghua . Hamel's field variational integrator of geometrically exact beam
Acta Scientiarum Naturalium Universitatis Pekinensis 2016 , 52 (4 ): 692 -698 (in Chinese))
[本文引用: 3]
[8]
刘铖 , 胡海岩 . 基于李群局部标架的多柔体系统动力学建模与计算
力学学报 , 2021 , 53 (1 ): 213 -233
DOI
多柔体系统动力学主要研究由多个具有运动学约束、存在大范围相对运动的柔性部件构成的动力学系统的建模、计算和控制.多柔体系统不仅具有柔体大变形导致的几何非线性,更具有大范围刚体运动引起的几何非线性,其非线性程度远高于计算结构力学所研究的几何非线性问题.本文基于李群局部标架(local frame of Lie group, LFLG),讨论如何发展一套新的多柔体系统动力学建模和计算方法体系, 具体内容包括:基于局部标架的梁、板壳单元,适用于长时间历程计算的多柔体系统碰撞动力学积分算法,结合区域分解技术的大规模多柔体系统动力学并行求解器, 以及若干验证性算例.上述基于李群局部标架的方法体系可在计算中消除刚体运动带来的几何非线性问题,使柔体系统的广义惯性力、广义弹性力及其雅可比矩阵满足刚体运动的不变性,使多柔体系统动力学与大变形结构力学相互统一,有望推动新一代多柔体系统动力学建模和计算软件的发展.
(Liu Cheng Hu Haiyan . Dynamic modeling and computation for flexible multibody systems based on the local frame of Lie group
Chinese Journal of Theoretical and Applied Mechanics 2021 , 53 (1 ): 213 -233 (in Chinese))
[9]
Simo JC Vu-Quoc L . On the dynamics in space of rods undergoing large motions - A geometrically exact approach
Computer Methods in Applied Mechanics and Engineering 1988 , 66 (2 ): 125 -161
DOI
URL
[10]
Romero I Armero F . An objective finite element approximation of the kinematics of geometrically exact rods and its use in the formulation of an energy-momentum conserving scheme in dynamics
International Journal for Numerical Methods in Engineering 2002 , 54 (12 ): 1683 -1716
DOI
URL
[11]
Simo JC Posbergh TA Marsden JE . Stability of coupled rigid body and geometrically exact rods: Block diagonalization and the energy-momentum method
Physics Reports 1990 , 193 (6 ): 279 -360
DOI
URL
[本文引用: 1]
[12]
Trivedi D Lotfi A Rahn CD . Geometrically exact models for soft robotic manipulators
IEEE Transactions on Robotics 2008 , 24 (4 ): 773 -780
DOI
URL
[本文引用: 1]
[13]
Farokhi H Ghayesh MH . Geometrically exact extreme vibrations of cantilevers
International Journal of Mechanical Sciences 2020 , 168 : 105051
DOI
URL
[本文引用: 1]
[14]
Bishop TC Cortez R Zhmudsky OO . Investigation of bend and shear waves in a geometrically exact elastic rod model
Journal of Computational Physics 2004 , 193 (2 ): 642 -665
DOI
URL
[本文引用: 1]
[15]
Marden JE West M . Discrete mechanics and variational integrators
Acta Numerica 2001 , 10 : 357 -514
DOI
URL
[本文引用: 1]
[16]
Demoures F Gay-Balmaz F Leyendecker S , et al . Discrete variational Lie group formulation of geometrically exact beam dynamics
Numerische Mathematik 2015 , 130 : 73 -123
DOI
URL
[本文引用: 1]
[17]
Ball KR Zenkov DV . Hamel's formalism and variational integrators
Fields Institute Communications 2015 , 73 : 477 -506
[本文引用: 2]
[18]
Shi D Yakov BK Zenkov DV , et al . Hamel's formalism for infinite-dimensional mechanical systems
Journal of Nonlinear Science 2017 , 27 (1 ): 241 -283
DOI
URL
[本文引用: 2]
[19]
Shi D Zenkov DV Bloch AM . Hamel's formalism for classical field theories
Journal of Nonlinear Science 2020 , 30 : 1307 -1353
DOI
URL
[本文引用: 2]
[20]
An Z Gao S Shi D , et al . A variational integrator for the Chaplygin-Timoshenko sleigh
Journal of Nonlinear Science 2020 , 30 (4 ): 1381 -1419
DOI
URL
[本文引用: 5]
[21]
冯康 , 秦孟兆 . 哈密尔顿系统的辛几何算法 . 杭州 : 浙江科学技术出版社 , 2003
[本文引用: 2]
(Feng Kang Qin Mengzhao . Symplectic Geometric Algorithms for Hamiltonian Systems. Hangzhou : Zhejiang Science and Technology Press , 2003 (in Chinese))
[本文引用: 2]
[22]
Kinoshita H Yoshida H Nakai H . Symplectic integrators and their application to dynamical astronomy
Celestial Mechanics and Dynamical Astronomy 1991 , 50 : 59 -71
DOI
URL
[本文引用: 1]
[23]
赵长印 , 廖新浩 , 刘林 . 辛积分方法在动力天文中的应用
天文学报 , 1992 (1 ): 36 -47
[本文引用: 1]
(Zhao Zhangyin Liao Xinhao Liu Lin . Application of symplectic integrators to dynamical astronomy
Acta Astronomica Sinica 1992 (1 ): 36 -47 (in Chinese))
[本文引用: 1]
[24]
丁培柱 , 李延欣 , 吴承埙 等 . 量子系统的辛算法
吉林大学自然科学学报 , 1993 (4 ): 75 -78
[本文引用: 1]
(Ding Peizhu Li Yanxin Wu Chengxun , et al . Sympletic algorithm of quantum systems
Acta Scientiarum Naturalium Universitatis Jilinensis 1993 (4 ): 75 -78 (in Chinese))
[本文引用: 1]
[25]
Yee KS . Numerical solution of initial boundary value problems involving Maxwell's equations in isotropic media
IEEE Transactions on Antennas and Propagation 1966 , 14 (5 ): 302 -307
DOI
URL
[本文引用: 1]
[26]
Stern A Tong Y Desbrun M , et al . Geometric computational electrodynamics with variational integrators and discrete differential forms
Fields Institute Communications 2015 , 73 : 437 -475
[本文引用: 1]
[27]
钟万勰 . 计算结构力学与最优控制 . 大连 : 大连理工大学出版社 , 1993
[本文引用: 1]
(Zhong Wanxie . Computatinal Structural Mechanics and Optimal Control. Dalian : Dalian University of Technology Press , 1993 (in Chinese))
[本文引用: 1]
[28]
张素英 , 邓子辰 . Poisson流形上广义Hamilton系统的保结构算法
西北工业大学学报 , 2002 , 20 (4 ): 625 -628
[本文引用: 1]
(Zhang Suying Deng Zichen . An algorithm for preserving the generalized poisson bracket structure of generalized Hamiltonian system
Journal of Northwestern Polytechnical University 2002 , 20 (4 ): 625 -628 (in Chinese))
[本文引用: 1]
[29]
刘世兴 , 郭永新 , 刘畅 . 一类特殊非完整力学系统的辛算法计算
物理学报 , 2008 , 3 : 1311 -1315
[本文引用: 1]
(Liu Shixing Guo Yongxin Liu Chang . A special nonholonomic mechanical system calculated by symplectic method
Acta Physica Sinica 2008 , 3 : 1311 -1315 (in Chinese))
[本文引用: 1]
[30]
满淑敏 , 高强 , 钟万勰 等 . 非完整约束Hamilton动力系统保结构算法
应用数学和力学 , 2020 , 41 (6 ): 581 -590
[本文引用: 1]
(Man Shumin Gao Qiang Zhong Wanxie . A structure-preserving algorithm for Hamiltonian systems with nonholonomic constraints
Applied Mathematics and Mechanics 2020 , 41 (6 ): 581 -590 (in Chinese))
[本文引用: 1]
[31]
Bloch AM . Nonholonomic Mechanics and Control, Interdisciplinary Applied Mathematics
New York: Springer , 2015
[本文引用: 1]
[32]
Michor PW . Topics in Differential Geometry
American Mathematical Society , 2008
[本文引用: 1]
[33]
Demoures F . Lie Group and Lie Algebra Variational Integrators for Flexible Beam and Plate in école
Polytechnique Fédérale de Lausanne , 2012
[本文引用: 1]
The Mathematics and Mechanics of Biological Growth
1
2017
... 柔性梁的动力学广泛存在于力学系统当中, 其研究发展不断与固体力学、流体力学、非线性动力学、生物力学等其他学科进行交叉[1 -4 ] . 几何精确梁模型作为容许大范围运动、大变形的柔性梁的理想模型, 自提出后在分析、数值、应用等方向吸引了大量关注[5 -11 ] . 在柔性机器人的运动控制[12 -13 ] 、 DNA动力学的研究[14 ] 中有广泛的应用. ...
Morphoelastic rods III: Differential growth and curvature generation in elastic filaments
0
2020
A rod-beam system with dynamic contact and thermal exchange condition
0
2021
多柔体系统动力学建模与优化研究进展
1
2019
... 柔性梁的动力学广泛存在于力学系统当中, 其研究发展不断与固体力学、流体力学、非线性动力学、生物力学等其他学科进行交叉[1 -4 ] . 几何精确梁模型作为容许大范围运动、大变形的柔性梁的理想模型, 自提出后在分析、数值、应用等方向吸引了大量关注[5 -11 ] . 在柔性机器人的运动控制[12 -13 ] 、 DNA动力学的研究[14 ] 中有广泛的应用. ...
多柔体系统动力学建模与优化研究进展
1
2019
... 柔性梁的动力学广泛存在于力学系统当中, 其研究发展不断与固体力学、流体力学、非线性动力学、生物力学等其他学科进行交叉[1 -4 ] . 几何精确梁模型作为容许大范围运动、大变形的柔性梁的理想模型, 自提出后在分析、数值、应用等方向吸引了大量关注[5 -11 ] . 在柔性机器人的运动控制[12 -13 ] 、 DNA动力学的研究[14 ] 中有广泛的应用. ...
Networks of geometrically exact beams: Well-posedness and stabilization
1
... 柔性梁的动力学广泛存在于力学系统当中, 其研究发展不断与固体力学、流体力学、非线性动力学、生物力学等其他学科进行交叉[1 -4 ] . 几何精确梁模型作为容许大范围运动、大变形的柔性梁的理想模型, 自提出后在分析、数值、应用等方向吸引了大量关注[5 -11 ] . 在柔性机器人的运动控制[12 -13 ] 、 DNA动力学的研究[14 ] 中有广泛的应用. ...
Fixed-point fluid structure interaction analysis based on geometrically exact approach
0
2020
几何精确梁的Hamel场变分积分子
3
2016
... 在几何精确梁的数值算法方面, 传统数值格式直接离散动力学方程, 可以实现连续系统的计算仿真, 但是很难保持系统内在的对称性、守恒性等物理特性, 如能量、动量等. Marsden等[15 ] 提出的变分积分子是一种从Lagrange函数出发, 通过离散变分原理直接得到保结构数值格式的方法. Demoures等[16 ] 提出的几何精确梁的李群积分子和李代数积分子可以自然保持能量动量, 但没有充分利用系统对称性, 对于几何精确梁等对称性很强的系统离散格式复杂程度很高. 在此基础上, Ball等[17 ] 对有限维系统提出了Hamel变分积分子, 主要适用于带对称性的约束力学系统, 特别是带对称性的非完整约束力学系统. Shi等[18 -20 ] 进一步应用无穷维几何中的活动标架法结合变分原理, 得到约束无穷维力学系统和经典场论中刻画运动的标准型—Hamel 形式, 进而得到能用于经典场论动力学计算的保结构格式—Hamel场变分积分子. Hamel 场变分积分子可以无需额外的Lagrange乘子来求解无穷维约束力学系统, 特别是非完整力学系统. 其是一种分布式算法, 每一次计算只需利用待计算点周围的信息, 具有计算效率高的特点. 王亮等[7 ] 将Hamel场变分积分子应用于几何精确梁, 并通过数值算法验证了Hamel场变分积分子能长时间保结构的特征. ...
... 对Hamel变分积分子的现有研究结果在数值上充分表现出了其对非线性系统, 包括有限维系统、无穷维系统、完整系统与非完整系统, 长时间动力学行为的良好预测[7 , 17 , 20 ] . 本文以几何精确梁为例, 利用离散Noether定理, 研究了Hamel场变分积分子的保动量性质, 以期为进一步研究其保结构性质提供参考依据. ...
... 这里的首项可作为连续动量(11)的直接离散, 从而Hamel变分积分子在$O(\Delta t)$ 误差范围内可以保持此离散动量的首项[7 ] . ...
几何精确梁的Hamel场变分积分子
3
2016
... 在几何精确梁的数值算法方面, 传统数值格式直接离散动力学方程, 可以实现连续系统的计算仿真, 但是很难保持系统内在的对称性、守恒性等物理特性, 如能量、动量等. Marsden等[15 ] 提出的变分积分子是一种从Lagrange函数出发, 通过离散变分原理直接得到保结构数值格式的方法. Demoures等[16 ] 提出的几何精确梁的李群积分子和李代数积分子可以自然保持能量动量, 但没有充分利用系统对称性, 对于几何精确梁等对称性很强的系统离散格式复杂程度很高. 在此基础上, Ball等[17 ] 对有限维系统提出了Hamel变分积分子, 主要适用于带对称性的约束力学系统, 特别是带对称性的非完整约束力学系统. Shi等[18 -20 ] 进一步应用无穷维几何中的活动标架法结合变分原理, 得到约束无穷维力学系统和经典场论中刻画运动的标准型—Hamel 形式, 进而得到能用于经典场论动力学计算的保结构格式—Hamel场变分积分子. Hamel 场变分积分子可以无需额外的Lagrange乘子来求解无穷维约束力学系统, 特别是非完整力学系统. 其是一种分布式算法, 每一次计算只需利用待计算点周围的信息, 具有计算效率高的特点. 王亮等[7 ] 将Hamel场变分积分子应用于几何精确梁, 并通过数值算法验证了Hamel场变分积分子能长时间保结构的特征. ...
... 对Hamel变分积分子的现有研究结果在数值上充分表现出了其对非线性系统, 包括有限维系统、无穷维系统、完整系统与非完整系统, 长时间动力学行为的良好预测[7 , 17 , 20 ] . 本文以几何精确梁为例, 利用离散Noether定理, 研究了Hamel场变分积分子的保动量性质, 以期为进一步研究其保结构性质提供参考依据. ...
... 这里的首项可作为连续动量(11)的直接离散, 从而Hamel变分积分子在$O(\Delta t)$ 误差范围内可以保持此离散动量的首项[7 ] . ...
基于李群局部标架的多柔体系统动力学建模与计算
0
2021
基于李群局部标架的多柔体系统动力学建模与计算
0
2021
On the dynamics in space of rods undergoing large motions - A geometrically exact approach
0
1988
An objective finite element approximation of the kinematics of geometrically exact rods and its use in the formulation of an energy-momentum conserving scheme in dynamics
0
2002
Stability of coupled rigid body and geometrically exact rods: Block diagonalization and the energy-momentum method
1
1990
... 柔性梁的动力学广泛存在于力学系统当中, 其研究发展不断与固体力学、流体力学、非线性动力学、生物力学等其他学科进行交叉[1 -4 ] . 几何精确梁模型作为容许大范围运动、大变形的柔性梁的理想模型, 自提出后在分析、数值、应用等方向吸引了大量关注[5 -11 ] . 在柔性机器人的运动控制[12 -13 ] 、 DNA动力学的研究[14 ] 中有广泛的应用. ...
Geometrically exact models for soft robotic manipulators
1
2008
... 柔性梁的动力学广泛存在于力学系统当中, 其研究发展不断与固体力学、流体力学、非线性动力学、生物力学等其他学科进行交叉[1 -4 ] . 几何精确梁模型作为容许大范围运动、大变形的柔性梁的理想模型, 自提出后在分析、数值、应用等方向吸引了大量关注[5 -11 ] . 在柔性机器人的运动控制[12 -13 ] 、 DNA动力学的研究[14 ] 中有广泛的应用. ...
Geometrically exact extreme vibrations of cantilevers
1
2020
... 柔性梁的动力学广泛存在于力学系统当中, 其研究发展不断与固体力学、流体力学、非线性动力学、生物力学等其他学科进行交叉[1 -4 ] . 几何精确梁模型作为容许大范围运动、大变形的柔性梁的理想模型, 自提出后在分析、数值、应用等方向吸引了大量关注[5 -11 ] . 在柔性机器人的运动控制[12 -13 ] 、 DNA动力学的研究[14 ] 中有广泛的应用. ...
Investigation of bend and shear waves in a geometrically exact elastic rod model
1
2004
... 柔性梁的动力学广泛存在于力学系统当中, 其研究发展不断与固体力学、流体力学、非线性动力学、生物力学等其他学科进行交叉[1 -4 ] . 几何精确梁模型作为容许大范围运动、大变形的柔性梁的理想模型, 自提出后在分析、数值、应用等方向吸引了大量关注[5 -11 ] . 在柔性机器人的运动控制[12 -13 ] 、 DNA动力学的研究[14 ] 中有广泛的应用. ...
Discrete mechanics and variational integrators
1
2001
... 在几何精确梁的数值算法方面, 传统数值格式直接离散动力学方程, 可以实现连续系统的计算仿真, 但是很难保持系统内在的对称性、守恒性等物理特性, 如能量、动量等. Marsden等[15 ] 提出的变分积分子是一种从Lagrange函数出发, 通过离散变分原理直接得到保结构数值格式的方法. Demoures等[16 ] 提出的几何精确梁的李群积分子和李代数积分子可以自然保持能量动量, 但没有充分利用系统对称性, 对于几何精确梁等对称性很强的系统离散格式复杂程度很高. 在此基础上, Ball等[17 ] 对有限维系统提出了Hamel变分积分子, 主要适用于带对称性的约束力学系统, 特别是带对称性的非完整约束力学系统. Shi等[18 -20 ] 进一步应用无穷维几何中的活动标架法结合变分原理, 得到约束无穷维力学系统和经典场论中刻画运动的标准型—Hamel 形式, 进而得到能用于经典场论动力学计算的保结构格式—Hamel场变分积分子. Hamel 场变分积分子可以无需额外的Lagrange乘子来求解无穷维约束力学系统, 特别是非完整力学系统. 其是一种分布式算法, 每一次计算只需利用待计算点周围的信息, 具有计算效率高的特点. 王亮等[7 ] 将Hamel场变分积分子应用于几何精确梁, 并通过数值算法验证了Hamel场变分积分子能长时间保结构的特征. ...
Discrete variational Lie group formulation of geometrically exact beam dynamics
1
2015
... 在几何精确梁的数值算法方面, 传统数值格式直接离散动力学方程, 可以实现连续系统的计算仿真, 但是很难保持系统内在的对称性、守恒性等物理特性, 如能量、动量等. Marsden等[15 ] 提出的变分积分子是一种从Lagrange函数出发, 通过离散变分原理直接得到保结构数值格式的方法. Demoures等[16 ] 提出的几何精确梁的李群积分子和李代数积分子可以自然保持能量动量, 但没有充分利用系统对称性, 对于几何精确梁等对称性很强的系统离散格式复杂程度很高. 在此基础上, Ball等[17 ] 对有限维系统提出了Hamel变分积分子, 主要适用于带对称性的约束力学系统, 特别是带对称性的非完整约束力学系统. Shi等[18 -20 ] 进一步应用无穷维几何中的活动标架法结合变分原理, 得到约束无穷维力学系统和经典场论中刻画运动的标准型—Hamel 形式, 进而得到能用于经典场论动力学计算的保结构格式—Hamel场变分积分子. Hamel 场变分积分子可以无需额外的Lagrange乘子来求解无穷维约束力学系统, 特别是非完整力学系统. 其是一种分布式算法, 每一次计算只需利用待计算点周围的信息, 具有计算效率高的特点. 王亮等[7 ] 将Hamel场变分积分子应用于几何精确梁, 并通过数值算法验证了Hamel场变分积分子能长时间保结构的特征. ...
Hamel's formalism and variational integrators
2
2015
... 在几何精确梁的数值算法方面, 传统数值格式直接离散动力学方程, 可以实现连续系统的计算仿真, 但是很难保持系统内在的对称性、守恒性等物理特性, 如能量、动量等. Marsden等[15 ] 提出的变分积分子是一种从Lagrange函数出发, 通过离散变分原理直接得到保结构数值格式的方法. Demoures等[16 ] 提出的几何精确梁的李群积分子和李代数积分子可以自然保持能量动量, 但没有充分利用系统对称性, 对于几何精确梁等对称性很强的系统离散格式复杂程度很高. 在此基础上, Ball等[17 ] 对有限维系统提出了Hamel变分积分子, 主要适用于带对称性的约束力学系统, 特别是带对称性的非完整约束力学系统. Shi等[18 -20 ] 进一步应用无穷维几何中的活动标架法结合变分原理, 得到约束无穷维力学系统和经典场论中刻画运动的标准型—Hamel 形式, 进而得到能用于经典场论动力学计算的保结构格式—Hamel场变分积分子. Hamel 场变分积分子可以无需额外的Lagrange乘子来求解无穷维约束力学系统, 特别是非完整力学系统. 其是一种分布式算法, 每一次计算只需利用待计算点周围的信息, 具有计算效率高的特点. 王亮等[7 ] 将Hamel场变分积分子应用于几何精确梁, 并通过数值算法验证了Hamel场变分积分子能长时间保结构的特征. ...
... 对Hamel变分积分子的现有研究结果在数值上充分表现出了其对非线性系统, 包括有限维系统、无穷维系统、完整系统与非完整系统, 长时间动力学行为的良好预测[7 , 17 , 20 ] . 本文以几何精确梁为例, 利用离散Noether定理, 研究了Hamel场变分积分子的保动量性质, 以期为进一步研究其保结构性质提供参考依据. ...
Hamel's formalism for infinite-dimensional mechanical systems
2
2017
... 在几何精确梁的数值算法方面, 传统数值格式直接离散动力学方程, 可以实现连续系统的计算仿真, 但是很难保持系统内在的对称性、守恒性等物理特性, 如能量、动量等. Marsden等[15 ] 提出的变分积分子是一种从Lagrange函数出发, 通过离散变分原理直接得到保结构数值格式的方法. Demoures等[16 ] 提出的几何精确梁的李群积分子和李代数积分子可以自然保持能量动量, 但没有充分利用系统对称性, 对于几何精确梁等对称性很强的系统离散格式复杂程度很高. 在此基础上, Ball等[17 ] 对有限维系统提出了Hamel变分积分子, 主要适用于带对称性的约束力学系统, 特别是带对称性的非完整约束力学系统. Shi等[18 -20 ] 进一步应用无穷维几何中的活动标架法结合变分原理, 得到约束无穷维力学系统和经典场论中刻画运动的标准型—Hamel 形式, 进而得到能用于经典场论动力学计算的保结构格式—Hamel场变分积分子. Hamel 场变分积分子可以无需额外的Lagrange乘子来求解无穷维约束力学系统, 特别是非完整力学系统. 其是一种分布式算法, 每一次计算只需利用待计算点周围的信息, 具有计算效率高的特点. 王亮等[7 ] 将Hamel场变分积分子应用于几何精确梁, 并通过数值算法验证了Hamel场变分积分子能长时间保结构的特征. ...
... 相容性条件描述了对流速度和对流应变生成的分布的可积性. 在场论框架下, 位形$ g$ 是以时空为底流形, 纤维为的主丛$SE(3)$的截面, 相容性条件在几何上可解释为主丛的局部平坦性条件. 对一般纤维丛情况下的相容性条件的讨论参见文献[19 ]. 对于给定初始条件和边界条件的几何精确梁, 其运动由动力学方程(3)和相容性条件(5) 共同确定, 将式(3)和式(5)构成的方程组称为几何精确梁的Hamel场方程组[18 -19 ] . ...
Hamel's formalism for classical field theories
2
2020
... 相容性条件描述了对流速度和对流应变生成的分布的可积性. 在场论框架下, 位形$ g$ 是以时空为底流形, 纤维为的主丛$SE(3)$的截面, 相容性条件在几何上可解释为主丛的局部平坦性条件. 对一般纤维丛情况下的相容性条件的讨论参见文献[19 ]. 对于给定初始条件和边界条件的几何精确梁, 其运动由动力学方程(3)和相容性条件(5) 共同确定, 将式(3)和式(5)构成的方程组称为几何精确梁的Hamel场方程组[18 -19 ] . ...
... -19 ]. ...
A variational integrator for the Chaplygin-Timoshenko sleigh
5
2020
... 在几何精确梁的数值算法方面, 传统数值格式直接离散动力学方程, 可以实现连续系统的计算仿真, 但是很难保持系统内在的对称性、守恒性等物理特性, 如能量、动量等. Marsden等[15 ] 提出的变分积分子是一种从Lagrange函数出发, 通过离散变分原理直接得到保结构数值格式的方法. Demoures等[16 ] 提出的几何精确梁的李群积分子和李代数积分子可以自然保持能量动量, 但没有充分利用系统对称性, 对于几何精确梁等对称性很强的系统离散格式复杂程度很高. 在此基础上, Ball等[17 ] 对有限维系统提出了Hamel变分积分子, 主要适用于带对称性的约束力学系统, 特别是带对称性的非完整约束力学系统. Shi等[18 -20 ] 进一步应用无穷维几何中的活动标架法结合变分原理, 得到约束无穷维力学系统和经典场论中刻画运动的标准型—Hamel 形式, 进而得到能用于经典场论动力学计算的保结构格式—Hamel场变分积分子. Hamel 场变分积分子可以无需额外的Lagrange乘子来求解无穷维约束力学系统, 特别是非完整力学系统. 其是一种分布式算法, 每一次计算只需利用待计算点周围的信息, 具有计算效率高的特点. 王亮等[7 ] 将Hamel场变分积分子应用于几何精确梁, 并通过数值算法验证了Hamel场变分积分子能长时间保结构的特征. ...
... 对Hamel变分积分子的现有研究结果在数值上充分表现出了其对非线性系统, 包括有限维系统、无穷维系统、完整系统与非完整系统, 长时间动力学行为的良好预测[7 , 17 , 20 ] . 本文以几何精确梁为例, 利用离散Noether定理, 研究了Hamel场变分积分子的保动量性质, 以期为进一步研究其保结构性质提供参考依据. ...
... 令$\eta = { g}^{-1} \Delta { g} $为独立变分, 易知$\eta$与$\zeta$, $\gamma$满足如下变分公式[20 ] ...
... 定义离散变分$\eta^n_j = ({ g}^n_j)^{-1}\Delta { g}^n_j$. 利用离散变分原理可以得到结论[20 ] : ...
... $J_d$表达式中级数的存在技术上是李代数$\mathfrak{se}(3)$非交换性在BCH公式中的反映, 而根本上由于在Hamel框架下, 离散对流速度$\zeta^{n+1/2}_j$处于位形${ g}^n_j$与${ g}^{n+1}_j$之间, 故位形和离散对流速度值无法完全匹配, 需离散动量表达式中出现级数来弥补. 这种不匹配对于Hamel场变分积分子的构造是必要的, 可以使所得变分积分子具有更高精度[20 ] . 值得注意的是, 上式中的离散动量可以展开为 ...
2
2003
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
... [21 ]. 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
2
2003
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
... [21 ]. 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
Symplectic integrators and their application to dynamical astronomy
1
1991
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
辛积分方法在动力天文中的应用
1
1992
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
辛积分方法在动力天文中的应用
1
1992
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
量子系统的辛算法
1
1993
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
量子系统的辛算法
1
1993
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
Numerical solution of initial boundary value problems involving Maxwell's equations in isotropic media
1
1966
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
Geometric computational electrodynamics with variational integrators and discrete differential forms
1
2015
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
1
1993
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
1
1993
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
Poisson流形上广义Hamilton系统的保结构算法
1
2002
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
Poisson流形上广义Hamilton系统的保结构算法
1
2002
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
一类特殊非完整力学系统的辛算法计算
1
2008
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
一类特殊非完整力学系统的辛算法计算
1
2008
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
非完整约束Hamilton动力系统保结构算法
1
2020
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
非完整约束Hamilton动力系统保结构算法
1
2020
... 保结构性质对非线性力学系统的长时间定性行为的了解和定量分析是非常必要的. 这里结构包括 辛结构、酉结构、体积结构、接触结构、泊松结构 等几何结构, 也包括能量、动量、系统特征值等首次积分结构[21 ] . 在天体力学[22 -23 ] 、 量子力学[24 ] 、电磁学[25 ] 等学科中许多模型数值算法的构造中, 尽可能多地保持原系统的内在对称性、守恒性等物理特征的算法往往表现出很强的数值预测能力和跟踪能力[21 ] . 例如, 电磁学中受到广泛应用的Yee格式已被证明保持多辛结构和动量映射[26 ] . 在保结构算法的理论研究上, 钟万勰等[27 ] 建立了一套Hamilton动力系统的辛几何方法, 张素英等[28 ] 在此基础上,对Poisson流形上的广义Hamilton系统的数值算法进行了研究, 提出了广义Hamilton 系统显式的保持真解典则性的数值方法. 刘世兴等[29 ] 研究了特定的非完整系统的辛算法, 并将其与Runge-Kutta法进行对比, 说明了辛算法具有高的精确度. 满淑敏等[30 ] 提出了一类求解非完整系统的保结构算法, 并证明了其对称性, 说明了其收敛性和长时间保结构的特性. ...
Nonholonomic Mechanics and Control, Interdisciplinary Applied Mathematics
1
2015
... 本节首先证明自由的(不受外力、外力矩)的几何精确梁系统具有动量守恒性质, 随后通过离散Noether定理[31 ] 证明Hamel场变分积分子可以保持精确离散动量. ...
Topics in Differential Geometry
1
2008
... 根据式(13)和式(14)和BCH公式[32 ] 可知 ...
Lie Group and Lie Algebra Variational Integrators for Flexible Beam and Plate in école
1
2012
... 例二 考虑初始位形如图1 所示的不受外力的几何精确梁. 其参数[33 ] 如下: 梁长 $l = 1$, 横截面是边长为$0.1$ 的正方形, 密度$\rho = 1000$, 杨氏模量 $E= 10^7$, 泊松比 $\nu = 0.35$. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}