引言
极地船舶作为北极冰区安全通行的重要交通工具, 在极地事业中发挥着越来越重要的作用. 而推进系统作为船舶动力核心部分, 其设计和研究需要得到更多关注. 极地船舶破冰航行过程中开辟出来的碎冰航道很快被新的海冰覆盖, 以及航道周围的平整冰引起极地船舶转向和调头困难等问题, 而吊舱推进器具有优于常规的"螺旋桨$+$舵"推进系统的优势, 极大地提高了极地船舶的机动性和操纵性, 很好地解决了上述遇到的问题, 有利于保证极地船舶在冰区航行条件下的航行安全, 成为了极地船舶广泛采用的推进形式[1 -3 ] . 当极地船舶破冰航行时, 特别是尾部破冰时, 不同操纵状态的吊舱推进器与冰层直接发生切削作用, 或船体挤压产生的碎冰卡在吊舱推进器和船体之间使螺旋桨与冰发生连续的切削作用, 从而在螺旋桨上产生极端冰载荷, 导致吊舱推进器结构损坏、性能下降等问题. 因此, 冰区吊舱推进器冰载荷分析成为了吊舱推进器设计的关键.
然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态.
因此, 本文针对复杂工况下冰$\!-\!$海洋结构物接触判断方法研究的不足, 借鉴先进的近场动力学理论和面元法, 根据吊舱推进器独特的结构和操纵形式, 提出吊舱推进器在直航、斜航以及操舵状态下与冰的接触判断方法, 为冰区吊舱推进器数值预报方法的建立及强度优化设计提供技术支撑.
1 近场动力学理论
近场动力学方法由美国Sandia国家实验室的Silling博士提出的一种无网格方法[21 -22 ] , 他利用积分方式控制方程, 而非偏微分方程求解, 避免了对裂纹尖端位移场求空间导数, 有效地减小了列尖的奇异性, 避免了连续介质力学求解大变形问题的困难, 非常适合于求解材料的大尺度变形问题, 因此, 近场动力学方法模拟冰的破碎具有非常好的优势.
1.1 基本方程
在近场动力学方法求解过程中, 需要将研究对象离散为一系列的物质点, 关注物质点在其作用范围内与所有物质点相互作用时的物理现象, 如图1 所示. 在图中, 为了便于研究物质点空间位置的变化, 对物质点的相关信息进行了定义, 物质点的位移表示为$u$, 物质点之间的相对位置和相对位移分别表示为 $\xi $和$\eta $, 即 $\xi = x'- x$和$\eta =\mu ( x', t)- \mu ( x, t)$, $\xi +\eta$表示两个物质点之间的相对位置矢量. 而物质点之间的相互作用通过"键"进行表示, 与弹簧类似, 任意一个物质点$ x$与其领域半径$\delta$内的物质点发生作用, 而领域半径$\delta $之外的物质点与物质点$ x$不发生相互作用, 即
(1) $\begin{eqnarray} \label{eq1} |\xi|>\delta \Rightarrow f(\eta, \xi )=0,\ \ \forall \xi, \eta \end{eqnarray}$
图1
图1
物质点$ x$与物质点$ x'$之间的相互作用
Fig.1
Interaction between material particle $ x $ and material particle $ x'$
在参考坐标系中, 物质点$ x$的近场动力学运动方程可应用虚功原理推导得出[23 ] , 即
(2) $\begin{eqnarray} \label{eq2} \rho \ddot{ u}( x,t)=\int_{H_{x}} f( u( x', t)- u( x, t), x'- x){\rm d} V_{ x'} +{ b}({ x}, t) \end{eqnarray}$
其中, $H_{x}$是物质点$ x$及其领域半径内物质点构成的域, $ u$是物质点$ x$的位移, $\rho $是物质点密度, $ f$是物质点$ x'$与$ x$之间的力密度, $ b$是外部载荷.
1.2 本构方程
为了模拟冰块的断裂、变形以及裂纹形成和延伸的过程, 引入键伸长率的概念来表示物质点之间相互作用力的大小, 即[24 ]
(3) $\begin{eqnarray} \label{eq3} s=\dfrac{\left| {{\eta }+{\xi }} \right|-\left| {{\xi }} \right|}{\left| {{\xi }} \right|}=\dfrac{y-\left| {{\xi }} \right|}{\left| {{\xi }} \right|} \end{eqnarray}$
其中, 当键在拉伸状态时, $s$为正值; 在压缩状态时, $s$为负值. 由于标量形式的力密度函数$ f$不依赖于相对位置 $\xi $, 因此, 该材料为各向同性的.
此外, 为了将材料的破坏准则引入到本构方程中, 需要定义一个临界伸长率, 当键的伸长率大于临界伸长率时键发生断裂, 断裂完成后, 物质点之间的力密度为零. 以典型的PMB (prototype micro-elastic brittle)材料为例[25 ] , 其力密度函数表示为
(4) $\begin{eqnarray} \label{eq4} { f}(y(t),{\xi })=g(s(t,{\xi })){\mu }(t,{\xi }) \end{eqnarray}$
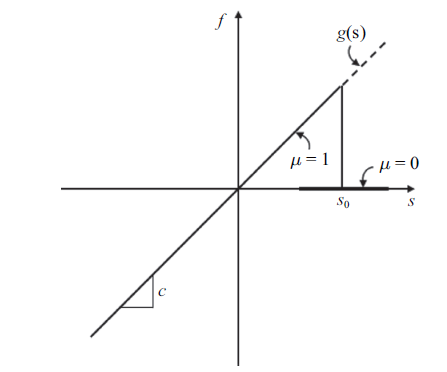
其中, $g$为线性标量函数, 其表达式为: $g(s)=cs\forall s$, $s$为键伸长率, $c$为键常数. $\mu $为与时间相关的标量函数, $\mu =0$时, 键发生断裂, $\mu =1$时, 未发生断裂.
(5) $\begin{eqnarray} \label{eq5} \mu (t,{\xi })=\left\{ {\begin{array}{l@{\quad }l} 1,& s({t}',{\xi })<s_{0} , 0<{t}'<t \\ 0,& \mbox{elso} \\ \end{array}} \right. \end{eqnarray}$
其中, $s_{0}$为极限伸长率, 是判断键能否发生断裂的标准, 在具体某个时刻认为是固定不变的, 如图2 所示. 对于PMB材料, 极限伸长率$s_{0}$为
(6) $\begin{eqnarray} \label{eq6} s_{0} =\sqrt {\dfrac{5G_{0} }{9\kappa \delta }} \end{eqnarray}$
其中, $G_{0}$是单位断裂面断裂时所释放的键能, $\kappa $是体积模量, $\delta$是物质点的领域半径.
图2
图2
PMB材料力和伸长率的关系[26 ]
Fig.2
Relationship between force and elongation of PMB material[26 ]
虽然PMB材料是各向同性的, 但是, 在某一特定条件下, 例如当冰垂向键发生断裂时冰的近场动力学物质点在该方向上相互作用消失, 则其在横向方向能构成承受更大或更小的拉/压应力, 此时, 冰表现出各向异性特征[27 ] . 因此, 引入键断裂的概念去清晰地描述单个物质点的局部损伤, 其定义为
(7) $\begin{eqnarray} \label{eq7} \varphi (x,t)=1-\dfrac{\int_{H_{x} } {\mu ({ x}, t,{\xi }){\rm d}V_{\xi } } }{\int_{H_{x} } {{\rm d}V_{\xi } } } \end{eqnarray}$
其中, $0\leqslant \varphi \leqslant 1$, 当$\varphi =0$时, 材料为初始状态, 当$\varphi =1$时, 表明物质点周围的所有键发生断裂. 键发生断裂后不能继续承受拉力, 将会导致材料的软化现象, 进而引起损伤的进一步深化, 断裂键的累积最终会形成一个裂纹的表面.
1.3 方程离散
近场动力学是一种无网格方法, 其运动方程是一种积分$\!-\!$微分方程, 通常不能得出解析解[28 ] . 因此, 在数值计算过程中通常将物体离散成物质点的形式, 然后对每一个物质点的运动方程进行积分, 方程(1)离散后的每个物质点的运动方程可表示为
(8) $\begin{eqnarray} \label{eq8} && \rho ( x_{(k)})\ddot{ u}({ x}_{(k)},t)=\sum\limits_{e=1}^N \sum\limits_{j=1}^{Ne}w_{(j)} \Big[ t({ u}({ x}_{(j)} ,t)-{ u}({ x}_{(k)},t),\\&&\qquad { x}_{(j)} -{ x}_{(k)})-{ u}({ x}_{(j)} ,t),{ x}_{(k)} -{ x}_{(j)} ) \Big]\cdot\\&&\qquad V_{(j)} +{ b}({ x}_{(k)} ,t) \end{eqnarray}$
其中, $N$为领域范围内子域的数量, $Ne$为第$e$个子域内积分点的数量, $ x_{(k)}$和$ x_{(j)}$分别为第$k$个和第$j$个积分点的位置, $V_{(j)}$为第$j$个立方体子域的体积.
2 吊舱推进器表面离散及模型简化
2.1 吊舱推进器模型
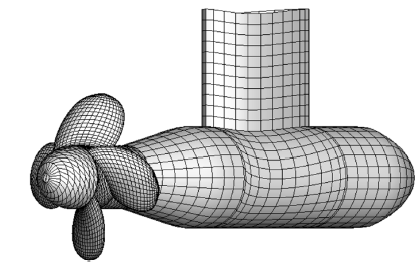
本文模拟使用的冰区吊舱推进器模型由中国船舶重工集团公司第七〇二研究所和课题组联合设计, 其中, 螺旋桨直径为0.25 m, 叶数为4, 纵倾角为10$^\circ$, 毂径比为0.368, 螺距比(0.7$R$)为0.775, 缩尺比为1:16.48, 舱体长度为0.648 m, 舱体最大直径为0.15 m, 舱体前端倾斜角度为12.3$^\circ$, 舱体后端长度为0.22 m, 支架高度为0.175 m, 支架弦长为0.24 m, 支架最大宽度为0.065 m.
2.2 吊舱推进器表面离散
在吊舱推进器表面离散过程中, 由于其结构、组成比较复杂, 且螺旋桨的表面曲率较大, 给冰$\!-\!$吊舱推进器的接触判断问题带来很大困难. 为了解决冰$\!-\!$吊舱推进器接触判断的问题, 本文借助面元法面元划分的思想, 将吊舱推进器表面进行网格划分来逼近吊舱推进器表面. 根据文献[7 ]中对螺旋桨桨叶网格划分的讨论, 螺旋桨桨叶径向和弦向均采用余弦网格划分, 其中, 余弦网格划分的节点表示为
(9) $\begin{array}{c}r_{j}=\frac{1}{2}\left(R_{0}+R_{\mathrm{h}}\right)-\frac{1}{2}\left(R_{0}-R_{\mathrm{h}}\right) \cos \beta_{\mathrm{r} j} \\j=1,2, \cdots, N_{\mathrm{r}}+1\end{array}$
(10) $s_{i}=\frac{1}{2}\left(1-\cos \beta_{\mathrm{c} i}\right) b_{j}, \quad j=1,2, \cdots, N_{\mathrm{c}}+1$
(11) $\beta_{\mathrm{r} j}=\left\{\begin{array}{ll}0, & j=1 \\\frac{2 j-1}{2 N_{\mathrm{r}}+1} \pi, & j=2,3, \cdots, N_{\mathrm{r}}+1\end{array}\right.$
(12) $\beta_{\mathrm{c} j}=\frac{i-1}{N_{\mathrm{c}}} \pi, \quad i=1,2, \cdots, N_{\mathrm{c}}+1$
其中, $R_{0}$为螺旋桨半径; $R_{\rm h}$为桨毂半径; $r_{j}$和$s_{j}$分别为径向和弦向网格划分点的位置; $b_{j}$为$r_{j}$处叶剖面的弦长; $N_{\rm r}$和$N_{\rm c}$分别为径向和弦向网格数.
图3 展示出了吊舱推进器表面网格划分, 其中, 吊舱推进器表面离散为若干个四边形单元, 在网格划分过程中, 将吊舱推进器划分为3段, 第一段为舱体前端到支架前端, 第二段为与支架相接的部分, 第三段为支架后端到舱体尾部. 第一段、第三段轴向和周向均采用平均网格划分, 舱体第二段轴向划分位置与支架相同, 支架轴向采用余弦网格划分, 高度上采用平均网格划分, 周向采用平均网格划分.
图3
图3
吊舱推进器网格划分
Fig.3
Grid division of podded propulsor
2.3 冰$\!-\!$吊舱推进器模型简化
根据冰$\!-\!$吊舱推进器的实际接触场景, 数值模拟冰$\!-\!$吊舱推进器的切削过程存在两个问题: (1)根据极地海冰实际场景, 冰块通常是不规则的, 这给数值建模带来很多问题, 且很难将冰块离散为物质点的形式; (2)若不考虑冰$\!-\!$冰、冰$\!-\!$吊舱推进器$\!-\!$船体之间的挤压作用, 只建立冰$\!-\!$吊舱推进器接触模型, 一旦冰块和螺旋桨接触, 冰块会由于不受约束而远离螺旋桨, 难以形成连续的切削过程.
此外, 由于数值计算方法和计算能力的限制, 目前建立冰$\!-\!$流$\!-\!$吊舱推进器耦合计算模型模拟冰区吊舱推进器的实际切削过程有很大难度. 因而, 为了便于开展冰$\!-\!$吊舱推进器切削状态的研究, 本文建立的冰$\!-\!$吊舱推进器切削数值模型忽略了流体的影响. 虽然这种数值模型模拟结果与实际情况存在差异, 无法体现出冰的存在对吊舱推进器水动力性能的影响, 但是能够比较真实地再现切削过程中冰块的破碎和瞬态冰载荷的变化. 根据Wang等[29 -30 ] 开展的系列实验测量数据可以看出, 冰桨切削过程中螺旋桨受到的冰载荷要比水动力载荷高一个量级以上, 水动力载荷对于螺旋桨总载荷的作用几乎可忽略不计. 事实上, 有些学者为了便于分析冰桨切削状态时冰的破碎模式和冰载荷大小, 在空气中开展了冰桨切削实验, Bach等[31 ] 认为研究冰桨接触冰载荷可在空气中开展冰桨铣削实验, 将水动力载荷从总载荷中区分出来, 有利于冰桨铣削过程的基础研究.
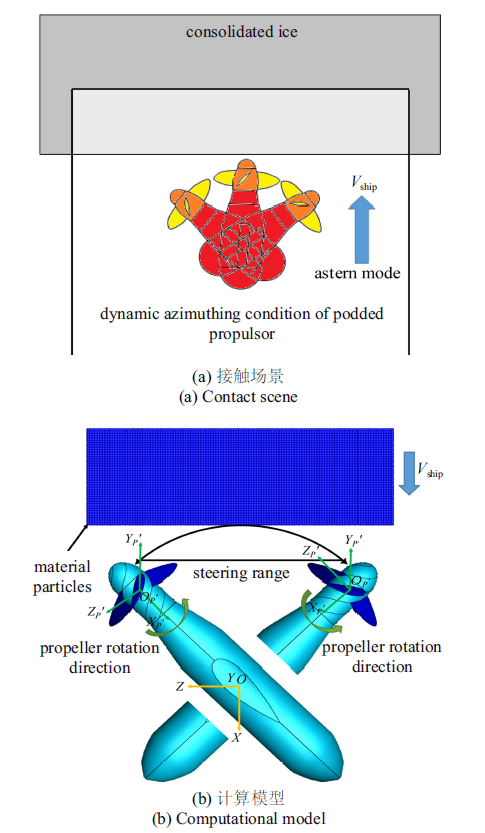
为此, 分别针对吊舱推进器的不同操纵状态对冰$\!-\!$吊舱推进器模型及运动模式进行简化, 在此之前, 为了便于说明螺旋桨旋转、吊舱推进器操纵和冰块运动, 对吊舱推进器坐标系进行定义, 如图4 所示. 螺旋桨局部坐标系为$O_{P}$$-$$X_{P}$, $Y_{P}$, $Z_{P}$, $O_{P}$位于桨盘面中心, $X_{P}$正方向是从螺旋桨指向舱体的方向, $Y_{P}$正方向垂直向上, $Z_{P}$正向根据右手定则确定. 为了分析吊舱推进器与船体连接处扭矩的变化, 建立了吊舱推进器局部坐标系$O_{U}$$-$$X_{U}$, $Y_{U}$, $Z_{U}$, $O_{U}$位于支架最上端翼型弦长的中点处, $X_{U}$, $Y_{U}$和$Z_{U}$方向与$X_{P}$, $Y_{P}$和$Z_{P}$的方向相同. 吊舱推进器整体坐标系为$O$$-$$X$, $Y$, $Z$, $O$位于舱体轴线与支架弦长中点垂线的交点处, $X$, $Y$和$Z $方向与$X_{P}$, $Y_{P}$和$Z_{P}$的方向相同.
图4
图4
吊舱推进器的坐标系
Fig.4
Coordinate system of podded propulsor
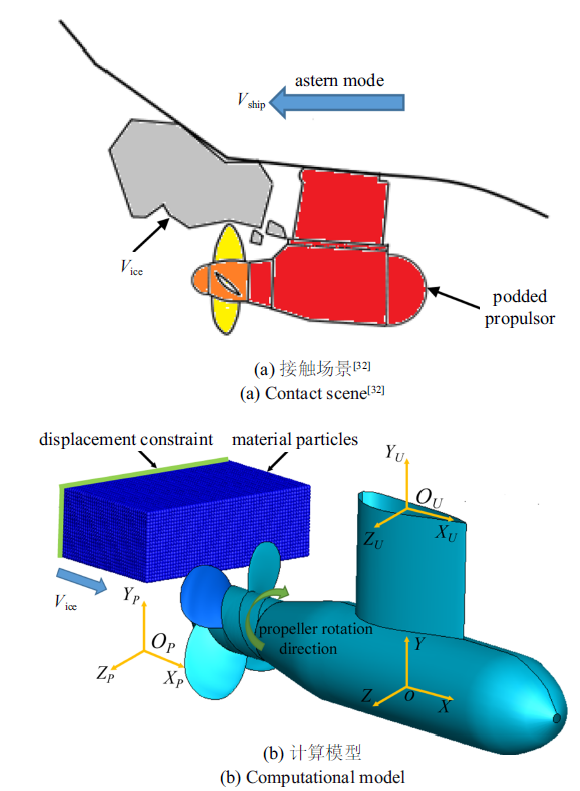
当吊舱推进器在直航状态与冰切削时, 假设吊舱推进器处于静止状态, 螺旋桨绕自身坐标系旋转. 同时, 为了获得相对稳定和周期性的冰载荷, 假设冰块由大量的物质点构成, 且以恒定的速度逐渐向吊舱推进器靠近, 冰块的形状可根据需要将其简化为规则形状, 例如长方体等. 在数值模拟过程中, 为了使冰块的运动状态更加接近实际情况, 在冰块后端进行位移约束和速度设置, 其中, 对冰块后端几层的物质点进行位移约束, 同时, 进行速度设置, 从而保证冰块后端的物质点以恒定的速度推动整块冰运动, 其中, 模型简化如图5 所示.
图5
图5
冰$\!-\!$吊舱推进器切削工况模型简化(直航状态)
Fig.5
Simplification of model for milling conditions of ice-podded propulsor (straight ahead)
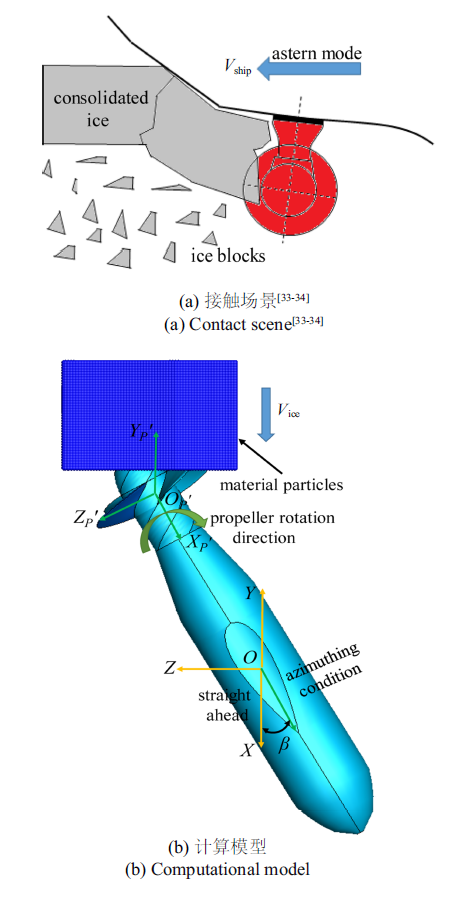
根据吊舱推进器在斜航状态与冰的切削场景[33 -34 ] , 对冰$\!-\!$吊舱推进器计算模型进行简化, 如图6 所示. 假设吊舱推进器绕整体坐标系中的$Y$轴进行偏转, 螺旋桨变为了在斜航状态局部坐标系${O}'_{P}-$ ${X}'_{P}$, ${Y}'_{P}{Z}'_{P}$中绕${X}'_{P} $轴进行旋转, 对于冰块形状和运动状态的假设与吊舱推进器直航状态相同.
图6
图6
冰$\!-\!$吊舱推进器切削工况模型简化
Fig.6
Simplification of model for milling conditions of ice-podded propulsor (azimuthing condition)
此外, 考虑到吊舱推进器在操舵状态与冰层或者冰脊的接触场景, 假设吊舱推进器在整体坐标系中位置不变, 绕整体坐标系中的$Y$轴进行操舵, 而螺旋桨除绕整体坐标系中的$Y$轴转动外也围绕自身的局部坐标系${O}'_{P}$$-$${X}'_{P}$, ${Y}'_{P}$, ${Z}'_{P}$进行旋转. 其中, 对冰块的形状和运动状态的假设与吊舱推进器直航状态时相同, 吊舱推进器操舵状态与冰的接触场景和模型简化如图7 所示.
图7
图7
冰$\!-\!$吊舱推进器切削工况模型简化(操舵状态)
Fig.7
Simplification of model for milling conditions of ice-podded propulsor (dynamic azimuthing condition)
3 冰$\!-\!$吊舱推进器不同作用方式下接触判断方法
3.1 吊舱推进器直航状态时接触判断方法
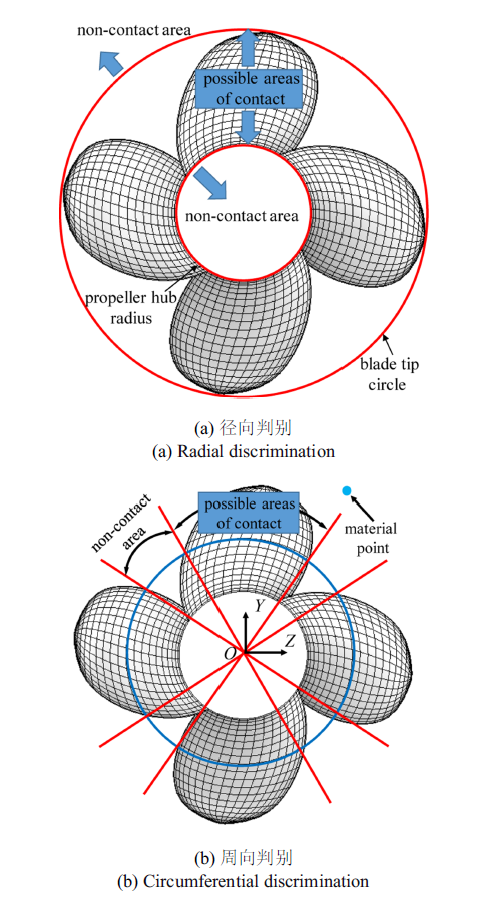
为了减少冰$\!-\!$螺旋桨接触检测的计算量和复杂的运算过程, 同时, 保证接触判断的精度和效率, 根据螺旋桨与冰的接触算法进行吊舱推进器直航状态下螺旋桨与冰物质点的判断[7 ] . 首先, 将冰物质点转换为极坐标的形式, 检测物质点是否位于桨叶叶根和叶梢所包围的范围内, 如果在此范围以外说明冰桨未接触, 否则进行下一步判断, 如图8 (a)所示. 如果在叶根和叶梢所包围的范围内, 再判断物质点是否位于桨叶导边和随边之间的角度方位内, 若不在该方位角内, 说明没有接触, 反之将其定义为可能与螺旋桨接触的物质点, 如图8 (b)所示.
图8
图8
冰与桨叶接触的区域判别法(直航状态)
Fig.8
Regional discrimination method of ice contacting with blades (straight ahead)
3.2 吊舱推进器斜航状态时接触判断方法
当开展吊舱推进器斜航状态冰载荷预报时, 首先实现吊舱推进器斜航状态的调整, 根据螺旋桨和支架、舱体的不同运动特征, 分别设置了不同的偏转方程, 螺旋桨偏转方程为
(13) $d=\sqrt{X^{2}+Z^{2}}$
(14) $\text { th } 1=\frac{\beta \pi}{180}+\tan (X / Z)$
(15) $\left.\begin{array}{l}X^{\prime}=d \times \sin (t h 1) \\Y^{\prime}=Y \\Z^{\prime}=d \times \cos (t h 1)\end{array}\right\}$
其中, $X$, $Y$和$Z$分别为直航状态时桨叶面元3个方向的坐标, $th1$为偏转角度, $\beta$为吊舱推进器的斜航角度, ${X}'$, $Y'$, $Z'$分别为斜航状态时桨叶面元3个方向的坐标.
(16) $\left.\begin{array}{l}X^{\prime \prime}=X \cos (-\beta)+Z \sin (-\beta) \\Y^{\prime \prime}=Y \\Z^{\prime \prime}=-X \sin (-\beta)+Z \cos (-\beta)\end{array}\right\}$
(17) $\left.\begin{array}{l}X^{\prime}=X^{\prime \prime} \\Y^{\prime}=\sqrt{Y^{\prime \prime 2}+Z^{\prime \prime 2}} \\Z^{\prime}=\tan \left(Z^{\prime \prime} / Y^{\prime \prime}\right)\end{array}\right\}$
其中, $X$, $Y$和$Z$分别为直航状态时面元3个方向的坐标, ${X}''$, $Y''$和${Z}''$为中间变量, ${X}'$, $Y'$和${Z}'$分别为斜航状态时面元3个方向的坐标.
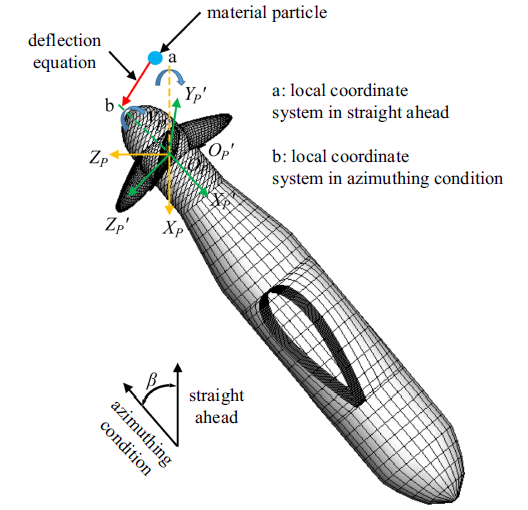
当吊舱推进器处于斜航状态时螺旋桨也呈现出了斜航状态, 此时, 螺旋桨的局部坐标${O}'_{P}$$-$${X}'_{P} ,{Y}'_{P}$, ${Z}'_{P}$与冰物质点进行极坐标转化的坐标系$O_{P}$$-$$X_{P}$, $Y_{P}$, $Z_{P}$出现了一定的夹角, 如图9 所示.
图9
图9
冰与桨叶接触的区域判别(斜航状态)
Fig.9
Regional discrimination method of ice contacting with blades (azimuthing condition)
在图9 中, 冰物质点无法直接使用螺旋桨的局部坐标系进行极坐标转化, 故吊舱推进器在斜航状态时冰物质点与螺旋桨的接触判别方法与直航状态时出现差异. 因此, 为了继续使用冰物质点与螺旋桨接触的径向和周向判别法, 提出了一种吊舱推进器斜航状态时冰桨接触判断方法, 即在冰物质点与桨叶接触判别之前加入冰物质点的三维偏转方程, 如式(18)所示, 该方程可将冰物质点转化到螺旋桨的局部坐标系中, 使冰物质点在螺旋桨斜航状态时的局部坐标系中进行极坐标变换. 其中, 冰物质点的偏转方程为
(18) $\begin{eqnarray} \label{eq18} \left. {{\begin{array}{l} {X_{P}^{\prime }=X_{P} \cos \beta +Z_{P} \sin \beta } \hfill \\ {Y_{P}^{\prime }=Y_{P} } \hfill \\ {Z_{P}^{\prime }=-X_{P} \sin \beta +Z_{P} \cos \beta } \hfill \\ \end{array} }} \right\} \end{eqnarray}$
其中, ${X}'_{P}$, $Y'_{P}$, $Z'_{P}$为冰物质点在螺旋桨斜航状态时局部坐标系坐标, $X_{P}$, $Y_{P}$, $Z_{P}$为直航状态时螺旋桨局部坐标系坐标.
3.3 吊舱推进器操舵状态时接触判断方法
开展吊舱推进器操舵状态冰载荷预报时, 首先实现吊舱推进器中螺旋桨、舱体和支架的操舵运动, 根据冰$\!-\!$吊舱推进器接触载荷预报程序的特点和优势, 选择以迭代时间步长为时间变量, 设置了以迭代时间步长为变量的操舵方程. 在吊舱推进器操舵过程中, 将操舵过程分为3个阶段(以俯视图为例), 第一阶段为直航状态逆时针操舵到左侧最大斜航角度, 第二阶段为左侧最大斜航角度顺时针操舵到右侧最大斜航角度, 第三阶段为右侧最大斜航角度操舵到直航状态, 后续操舵过程依次进行. 在吊舱推进器操舵方程设置的过程中, 由于螺旋桨既要实现自身的旋转又要进行操舵, 而舱体和支架只需要进行操舵, 为此, 分别针对螺旋桨、舱体和支架设置单独的操舵方程, 其中, 吊舱推进器操舵角度变化方程如式(19)$\sim\!$式(20)所示. 求解完成后将操舵角度方程代入吊舱推进器偏转方程(13)$\sim\!$式(17)中即可实现吊舱推进器的操舵运动.
(19) $\begin{eqnarray} \label{eq19} th1=\left\{\begin{array}{l} \dfrac{\pi }{180}\times tt1\times \omega \times {\rm d}t+{\rm artan}\left( {X,Z}\right), \\\qquad tt1\times \omega \times{\rm d}t\leqslant \beta\\[1mm] -\dfrac{\pi }{180}\times(t1\times \omega \times{\rm d}t-2\beta \times ttt)+\\[1mm]\qquad{\rm artan}\left( {X,Z} \right),\\[1mm]\qquad -\beta <(tt1\times \omega \times{\rm d}t-2\beta \times ttt)\leqslant \beta\\[1mm] -\dfrac{\pi }{180}\times(t1\times \omega \times{\rm d}t-2\beta \times (ttt+1))+\\[1mm]\qquad {\rm artan}\left( {X,Z} \right),\\[1mm]\qquad \beta <(tt1\times \omega \times{\rm d}t-2\beta \times ttt)\leqslant 3\beta \end{array} \right. \end{eqnarray}$
其中, $th1$为某一时刻吊舱推进器的偏转角度, $\beta $为操舵过程中最大斜航角度, $tt1$为迭代步数, $ttt$为螺旋桨偏转次数, $\omega $为操舵速率, d$t$为时间间隔.
(20) $\begin{eqnarray} \label{eq20} th1=\left\{ \begin{array}{l} \dfrac{\pi }{180}\times \omega \times{\rm d}t+{\rm artan}\left( {X,Z} \right),\\[1mm]\qquad tt1\times \omega \times{\rm d}t\leqslant \beta \\[1mm] -\dfrac{\pi }{180}\times tt1\times \omega \times{\rm d}t+{\rm artan}\left( {X,Z} \right),\\[1mm]\qquad -\beta <(tt1\times \omega\times{\rm d}t-2\beta \times tttt)\leqslant \beta \\[1mm] -\dfrac{\pi }{180}\times tt1\times \omega \times{\rm d}t+{\rm artan}\left( {X,Z} \right),\\[1mm]\qquad \beta <(tt1\times \omega \times{\rm d}t-2\beta \times tttt)\leqslant 3\beta \\ \end{array} \right. \end{eqnarray}$
其中, $tttt$为舱体和支架的偏转次数, 其他定义同式(9).
在吊舱推进器操舵过程中, 由于螺旋桨局部坐标${O}'_{P}$$-$${X}'_{P}$, ${Y}'_{P}$, ${Z}'_{P}$的位置随吊舱推进器的操舵实时发生改变, 从而使每一时刻冰物质点对应的极坐标都发生变化, 如图10 所示. 为此, 提出了一种吊舱推进器在操舵状态时冰桨接触判断方法, 即在吊舱推进器操舵过程中, 冰物质点与螺旋桨桨叶进行接 触判别之前, 借助偏转方程, 将冰物质点转移到每一时刻时螺旋桨的局部坐标${O}'_{P}$$-$${X}'_{P}$, ${Y}'_{P}$, ${Z}'_{P}$中, 转移完成后再利用径向判别法和周向判别法进行判断. 由于本文中吊舱推进器计算模型是围绕$Y$轴进行的操舵, 故冰物质点的偏转方程如式(21)$\sim\!$式(23)所示.
(21) $X=\left\{\begin{array}{c}X^{\prime} \cos \left(-\frac{\pi}{180} \times t t 1 \times \omega \times \mathrm{d} t\right)+ \\Z^{\prime} \sin \left(-\frac{\pi}{180} \times t t 1 \times \omega \times \mathrm{d} t\right), \\t t 1 \times \omega \times \mathrm{d} t \leqslant \beta \\X^{\prime} \cos \left[\frac{\pi}{180} \times(t t 1 \times \omega \times \mathrm{d} t-\right. \\2 \times \omega \times \mathrm{d} t \times t t t)]+ \\Z^{\prime} \sin \left[\frac{\pi}{180} \times(t t 1 \times \omega \times \mathrm{d} t-\right. \\2 \times \omega \times \mathrm{d} t \times t t t)], \\-\beta <(t t 1 \times \omega \times \mathrm{d} t-2 \beta \times t t t) \leqslant \beta \\X^{\prime} \cos \left\{-\frac{\pi}{180} \times[t t 1 \times \omega \times \mathrm{d} t-\right. \\2 \times \omega \times \mathrm{d} t \times(t t t+1)]\}+ \\Z^{\prime} \sin \left\{-\frac{\pi}{180} \times[t t 1 \times \omega \times \mathrm{d} t-\right. \\2 \times \omega \times \mathrm{d} t \times(ttt+1)]\}, \\\beta<(t t 1 \times \omega \times \mathrm{d} t-2 \beta \times t t t) \leqslant 3 \beta\end{array}\right.$
(22) $Y=\left\{\begin{array}{ll}Y^{\prime}, & t t 1 \times \omega \times \mathrm{d} t \leqslant \beta \\Y^{\prime}, & -\beta<(t t 1 \times \omega \times \mathrm{d} t-2 \beta \times ttt) \leqslant \beta \\Y^{\prime}, & \beta<(t t 1 \times \omega \times d t-2 \beta \times t t t) \leqslant 3 \beta\end{array}\right.$
(23) $Z=\left\{\begin{array}{c}-X^{\prime} \sin \left(-\frac{\pi}{180} \times t t 1 \times \omega \times \mathrm{d} t\right)+ \\Z^{\prime} \cos \left(-\frac{\pi}{180} \times t t 1 \times \omega \times \mathrm{d} t\right), \\t t 1 \times \omega \times \mathrm{d} t \leqslant \beta \\-X^{\prime} \sin \left[\frac{\pi}{180} \times(t t 1 \times \omega \times \mathrm{d} t-\right. \\2 \times \omega \times \mathrm{d} t \times t t t)]+ \\Z^{\prime} \cos \left[\frac{\pi}{180} \times(t t 1 \times \omega \times \mathrm{d} t-\right. \\2 \times \omega \times \mathrm{d} t \times t t t)], \\-\beta<(t t 1 \times \omega \times \mathrm{d} t-2 \beta \times t t t) \leqslant \beta \\-X^{\prime} \sin \left\{-\frac{\pi}{180} \times[t t 1 \times \omega \times \mathrm{d} t-\right. \\2 \times \omega \times \mathrm{d} t \times(t t t+1)]\}+ \\Z^{\prime} \cos \left\{-\frac{\pi}{180} \times[t t 1 \times \omega \times \mathrm{d} t-\right. \\2 \times \omega \times \mathrm{d} t \times(t t t+1)]\}, \\\beta<(t t 1 \times \omega \times \mathrm{d} t-2 \beta \times t t t) \leqslant 3 \beta\end{array}\right.$
其中, $X$, $Y$和$Z$为冰物质点在直航状态时坐标系坐标, ${X}'$, $Y'$和${Z}'$为冰物质点在操舵过程中不同斜航角度时的坐标, 其他参数的定义如上文所示.
图10
图10
冰与桨叶接触的区域判别(操舵状态)
Fig.10
Regional discrimination method of ice contacting with blades (dynamic azimuthing condition)
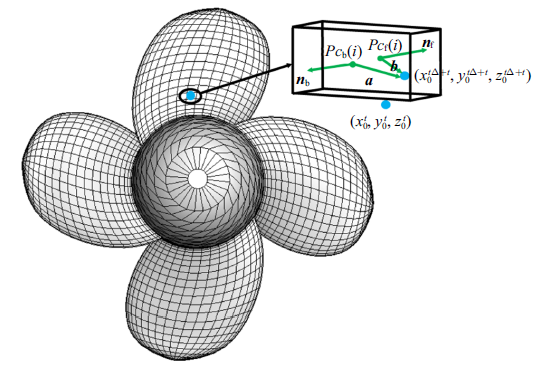
在确定了可能与螺旋桨发生接触的物质点后, 需要通过几何关系来检测冰物质点与桨叶是否发生接触. 由于螺旋桨桨叶具有叶面和叶背两个面, 因此, 根据叶面和叶背的面元以及冰物质点之间的关系, 求解两个面元的中点、法向量以及物质点与面元的向量, 求解得到的叶面和叶背的中心点坐标分别为($Pc_{\rm f}$(1), $Pc_{\rm f}$(2), $Pc_{\rm f}$(3))和($Pc_{\rm b}$(1), $Pc_{\rm b}$(2), $Pc_{\rm b}$(3)), 叶面和叶背的法向量分别为$ n_{\rm f}$和$ n_{\rm b}$, 物质点与面元的向量分别为$ a$和$ b$, 其中, 向量$ a=(X_{0}^{t+\Delta t}-Pc_{\rm b}$(1), $Y_{0}^{t+\Delta t}$$-$$Pc_{\rm b}$(2), $Z_{0}^{t +\Delta t}$$-$$Pc_{\rm b}$(3)), $ b=(X_{0}^{t +\Delta t}$$-$$Pc_{\rm f}$(1), $ Y_{0}^{t +\Delta t}$$-$$Pc_{\rm f}$(2), $Z_{0}^{t +\Delta t}$$-$$Pc_{\rm f}$(3)). 对于每一个可能与桨叶接触的物质点, 当$t$时刻物质点位于叶面之外, 而$t+\Delta t$时刻物质点坐标与面元法向量和面元中心点坐标满足式(24)时, 说明物质点和桨叶发生接触, 相关判断过程如图11 所示.
(24) $\begin{eqnarray} \label{eq24} ({ n}_{\rm b} \cdot { a})\times ({ n}_{\rm f} \cdot { b})\geqslant 0 \end{eqnarray}$
图11
图11
物质点与桨叶面元接触的判断过程
Fig.11
Judgment process of material point contacting with blade surface
3.4 冰$\!-\!$吊舱推进器接触载荷计算
在冰$\!-\!$吊舱推进器切削过程中, 桨叶与冰物质点将发生接触, 接触完成后, 物质点将会进入桨叶内部, 但为了真实反映冰桨切削的物理过程, 将进入到桨叶内部的物质点进行位置的重新分配, 即将该物质点分配到桨叶附近, 其中, 渗入到桨叶内的物质点和新分配物质点的距离为
(25) $\begin{eqnarray} \label{eq25} d=\left\{\begin{array}{ll} \dfrac{\left| {({n}_{\rm b} \cdot {a})\times ({n}_{\rm f} \cdot {b})} \right|}{\sqrt {{n}_{\rm b} \cdot {n}_{\rm b} } },&\mbox{the blade back}\\ \dfrac{\left| {({n}_{\rm b} \cdot {a})\times ({n}_{\rm f} \cdot {b})} \right|}{\sqrt {{n}_{\rm f} \cdot {n}_{\rm f} } },&\mbox{the blade face}\\ \end{array}\right. \end{eqnarray}$
其中, $ n_{\rm b}$和$ n_{\rm f}$分别为螺旋桨叶背和叶面中面元的法向量; $ a$和$ b$分别为冰物质点的坐标与叶背和叶面面元中心的向量.
(26) $\begin{eqnarray} \label{eq26} {x}_{(k)}^{t +\Delta t} ={x}_{(k)}^{t} +{V}_{0} \cdot \Delta t+d\cdot {n} \end{eqnarray}$
其中, $k$为第$k$个冰物质点, $ V_{0}$为冰物质点的速度, $ n$为接触点面元的法向量.
此外, 在冰与桨叶接触后的冰物质点$ x_{(k)}$在$t+\Delta t$时刻的速度可表示为
(27) $\begin{eqnarray} \label{eq27} {v}_{(k)}^{t+\Delta t} =\dfrac{{u}_{(k)}^{t+\Delta t} -{u}_{(k)}^{t} }{\Delta t} \end{eqnarray}$
其中, ${ u}_{(k)}^{t+\Delta t} $是$t+\Delta t$时刻重新分配的冰物质点位移, ${ u}_{(k)}^{t} $是$t$时刻冰物质点位移.
在$t+\Delta t$时刻, 冰物质点对螺旋桨桨叶的接触力${ F}_{(k)}^{t+\Delta t}$表示为
(28) $\begin{eqnarray} \label{eq28} {F}_{(k)}^{t+\Delta t} =-\rho_{(k)} \dfrac{{v}_{(k)}^{t+\Delta t} -{v}_{(k)}^{t} }{\Delta t}{V}_{(k)} \end{eqnarray}$
其中, $\rho_{(k)}$为冰物质点的密度, ${ v}_{(k)}^{t+\Delta t}$为$t+\Delta t$时刻运动到桨叶内部的冰物质点的速度, ${ v}_{(k)}^{t}$为$t$时刻即将进入桨叶的物质点速度, $V_{(k)}$为物质点的体积.
通过冰$\!-\!$吊舱推进器接触判断和物质点接触力的计算, 可判断出计算域内任意一个冰物质点是否与螺旋桨接触, 若发生接触, 则判断出物质点与螺旋桨中那个桨叶的第几个面元发生接触以及对应的接触力大小. 在$t+\Delta t$时刻螺旋桨表面任意一个面元的接触力可通过叠加与面元接触的所有物质点的接触力, 如式(29)所示
(29) $\begin{eqnarray} \label{eq29} {F}_{(k)}^{t+\Delta t} =\sum\limits_{k=1} {{F}_{(k)}^{t+\Delta t} } \lambda_{(k)}^{t+\Delta t} \end{eqnarray}$
其中, $\lambda_{(k)}^{t+\Delta t} $可表示为
(30) $\begin{eqnarray} \label{eq30} \lambda_{(k)}^{t+\Delta t} =\left\{ {\begin{array}{ll} 1,&\mbox{inside impactor}\\ 0,&\mbox{outside impactor}\\ \end{array}} \right. \end{eqnarray}$
从而可以计算出$t+\Delta t$时刻螺旋桨表面上任意一个面元$j$的接触压力, 如式(31)所示
(31) $\begin{eqnarray} \label{eq31} p_{(j)}^{t+\Delta t} =\dfrac{\left| {{F}_{(j)}^{t+\Delta t} } \right|}{S_{(j)} } \end{eqnarray}$
通过对整个螺旋桨表面接触压力$p_{(j)}^{t+\Delta t}$进行积分可得到整个螺旋桨或单个桨叶在不同方向上的力和力矩, 其中, 螺旋桨轴向力和力矩表示为
(32) $\begin{eqnarray} \label{eq32} &&\left. {\begin{array}{l} F_{X} (k_{t} \Delta \theta )=-T(k_{t} \Delta \theta )=\sum\limits_{k=1}^Z {\sum\limits_{j=1}^{N_{p} } {p_{j}^{k} (k_{t} \Delta \theta )n_{Xj}^{k} } } S_{j}^{k} \\ F_{Y} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z {\sum\limits_{j=1}^{N_{p} } {p_{j}^{k} (k_{t} \Delta \theta )n_{Yj}^{k} } } S_{j}^{k} \\ F_{Z} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z {\sum\limits_{j=1}^{N_{p} } {p_{j}^{k} (k_{t} \Delta \theta )n_{Zj}^{k} } } S_{j}^{k} \\ \end{array}} \right\}\quad \end{eqnarray}$
(33) $\begin{eqnarray} \label{eq33} \left.{\begin{array}{l} M_{X} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z {\sum\limits_{j=1}^{N_{p} } {p_{j}^{k} (k_{t} \Delta \theta )(n_{Zj}^{k} } } Y_{j}^{k} -n_{Yj}^{k} Z_{j}^{k} )S_{j}^{k} \\ M_{Y} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z {\sum\limits_{j=1}^{N_{p} } {p_{j}^{k} (k_{t} \Delta \theta )(n_{Xj}^{k} Z_{j}^{k} -n_{Zj}^{k} X_{j}^{k} )} } S_{j}^{k} \\ M_{Z} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z {\sum\limits_{j=1}^{N_{p} } {p_{j}^{k} (k_{t} \Delta \theta )(n_{Zj}^{k} X_{j}^{k} -n_{Yj}^{k} Y_{j}^{k} )} } S_{j}^{k} \\ \end{array}} \right\}\quad \end{eqnarray}$
其中, $(n_{Xj}^{k}, n_{Yj}^{k}, n_{Zj}^{k})$为$O_{P}$$-$$X_{P}$, $Y_{P}$, $Z_{P}$坐标系第$k$个桨叶上第$j$个面元的单位法向量; $(X_{j}^{k}, Y_{j}^{k}, Z_{j}^{k})$为$O_{P}$$-$$X_{P}$, $Y_{P}$, $Z_{P}$坐标系中第$k$个桨叶上第$j$个面元的控制点坐标, $S_{j}^{k}$为第$k$个桨叶上第$j$个面元的面积, $Z$是螺旋桨叶数, $N_{p}$为桨叶中与物质点接触的面元个数.
在吊舱单元冰载荷预报过程中, 由于本文模拟未涉及流体的影响, 所以, 假设吊舱单元整体轴向力和螺旋桨受到的轴向力相等, 如式(34)所示, 而吊舱单元扭矩的计算公式, 如式(35)所示
(34) $\begin{eqnarray} \label{eq34} &&\left. {\begin{array}{l} F_{UX} =F_{X} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z {\sum\limits_{j=1}^{N_{p} } {p_{j}^{k} (k_{t} \Delta \theta )n_{Xj}^{k} } } S_{j}^{k} \\[1mm] F_{UY} =F_{Y} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z {\sum\limits_{j=1}^{N_{p} } {p_{j}^{k} (k_{t} \Delta \theta )n_{Yj}^{k} } } S_{j}^{k} \\[1mm] F_{UZ} =F_{Z} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z {\sum\limits_{j=1}^{N_{p} } {p_{j}^{k} (k_{t} \Delta \theta )n_{Zj}^{k} } } S_{j}^{k} \\[1mm] \end{array}} \right\} \end{eqnarray}$
(35) $\begin{eqnarray} \label{eq35} \left. \begin{array}{l} M_{UX} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z \sum\limits_{j=1}^{N_{p} } p_{j}^{k} (k_{t} \Delta \theta )\cdot\\\qquad [n_{Zj}^{k} (L_{Y} -Y_{j}^{k} )-n_{Yj}^{k} Z_{j}^{k} ]S_{j}^{k} \\[1mm] M_{UY} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z \sum\limits_{j=1}^{N_{p} } p_{j}^{k} (k_{t} \Delta \theta )\cdot\\\qquad [n_{Xj}^{k} Z_{j}^{k} -n_{Zj}^{k} (L_{X} -X_{j}^{k} )]S_{j}^{k} \\[1mm] M_{UZ} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z \sum\limits_{j=1}^{N_{p} } p_{j}^{k} (k_{t} \Delta \theta )\cdot\\\qquad [n_{Zj}^{k} (L_{X} -X_{j}^{k} )-n_{Yj}^{k} (L_{Y} -Y_{j}^{k} )]S_{j}^{k} \\ \end{array} \right\} \end{eqnarray}$
其中, $L_{X}$和$L_{Y}$分别为支架最上端翼型弦长中点与桨盘面中心之间的距离在$X$轴和$Y$轴的分量, $L_{X}$和$L_{Y}$对应于吊舱推进器直航状态.
由于吊舱推进器在斜航状态和操舵过程中桨盘面到支架弦长中点的力臂在$X$轴和$Z$轴的分量不断变化, 故提出了吊舱推进器操舵过程中吊舱单元扭矩的求解公式, 如式(36)所示
(36a) $\begin{eqnarray} \label{eq36} \left. {\begin{array}{l} M_{UX} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z {\sum\limits_{j=1}^{N_{p} } {p_{j}^{k} (k_{t} \Delta \theta )\Big[n_{Zj}^{k} } } (L_{Y} -Y_{j}^{k} )-\\\qquad n_{Yj}^{k} (L_{X} \times \sin th1+Z_{j}^{k} )\Big]S_{j}^{k} \\[1mm] M_{UY} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z \sum\limits_{j=1}^{N_{p} } p_{j}^{k} (k_{t} \Delta \theta )\Big[n_{Xj}^{k} (L_{X} \times \sin th1+\\\qquad Z_{j}^{k} )- n_{Zj}^{k} (L_{X} \times \cos th1-X_{j}^{k} )\Big]S_{j}^{k} \\[1mm] M_{UZ} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z \sum\limits_{j=1}^{N_{p} } p_{j}^{k} (k_{t} \Delta \theta )\Big[n_{Zj}^{k} (L_{X} \times \cos th1-\\\qquad X_{j}^{k} )- n_{Yj}^{k} (L_{Y} -Y_{j}^{k} )\Big]S_{j}^{k} \\ \end{array}} \right\}\qquad \end{eqnarray}$
(36b) $\begin{eqnarray} \label{eq37} \left. \begin{array}{l} M_{UX} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z \sum\limits_{j=1}^{N_{p} } p_{j}^{k} (k_{t} \Delta \theta )\Big[n_{Zj}^{k} (L_{Y} -Y_{j}^{k} )-\\\qquad n_{Yj}^{k} (L_{X} \times \sin th1-Z_{j}^{k} )\Big]S_{j}^{k} \\[1mm] M_{UY} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z \sum\limits_{j=1}^{N_{p} } p_{j}^{k} (k_{t} \Delta \theta )\Big[n_{Xj}^{k} (L_{X} \times \sin th1-\\\qquad Z_{j}^{k} )- n_{Zj}^{k} (L_{X} \times \cos th1-X_{j}^{k} )\Big]S_{j}^{k} \\[1mm] M_{UZ} (k_{t} \Delta \theta )=\sum\limits_{k=1}^Z \sum\limits_{j=1}^{N_{p} } p_{j}^{k} (k_{t} \Delta \theta )\Big[n_{Zj}^{k} (L_{X} \times \cos th1-\\\qquad X_{j}^{k} )- n_{Yj}^{k} (L_{Y} -Y_{j}^{k} )\Big]S_{j}^{k} \\ \end{array} \right\}\qquad \end{eqnarray}$
其中, $th1$为某一时刻吊舱推进器的偏转角度, 当$th1\geqslant 0$时, 利用式(36a)进行吊舱单元扭矩的求解, 反之利用式(36b)进行求解. 当偏转角度$th1$达到最大值时为吊舱推进器斜航状态时扭矩的计算公式.
4 不同接触判断方法在冰$\!-\!$吊舱推进器切削状态中的应用及分析
4.1 直航状态下冰$\!-\!$吊舱推进器接触判断方法的应用及分析
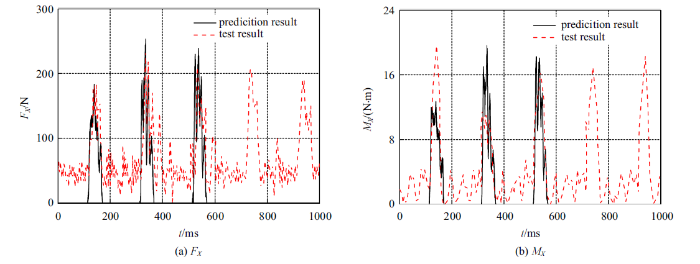
在数值模拟过程中, 以螺旋桨模型网格划分数目22$\times$22, 冰的密度$\rho =800$ kg/m$^{3}$、泊松比$\mu=0.25$、弹性模量$E=280$ MPa、物质点大小d$x=0.6D/45$、领域半径$\delta =3.015{\rm d}x$[35 ] 、极限伸长率$scr=0.06$、时间步长d$t=3.6\times 10^{-6}$为参数进行设置, 并与Wang等[30 ] 在冰水池内开展的冰$\!-\!$吊舱推进器切削试验进行对比和分析, 对比结果如图12 所示.
图12
图12
轴向力和扭矩的数值计算值与试验值对比
Fig.12
Comparison between numerical calculation value and test value of axial force and torque
图12 给出了数值模拟过程中单桨叶$X$轴方向上轴向力和扭矩随时间的变化曲线与试验值的对比, 由于冰块长度设置有限, 这里仅展示出了600 ms时间范围内桨叶冰载荷的变化曲线. 由图12 可知, 两条曲线波峰附近区域属于冰桨切削区域, 从整体来看数值计算值和试验值的冰载荷数量级、冰载荷变化趋势以及冰载荷峰值基本一致, 两条曲线的吻合性较好, 但是由于冰$\!-\!$螺旋桨切削作用的随机性, 不可能使两条曲线完全一致. 此外, 在数值计算时, 由于未考虑流体的影响, 当桨叶与冰未发生切削作用时桨叶受到的载荷为零. 而在冰水池试验时, 由于流体的存在, 当桨叶与冰未发生切削作用时桨叶受到了水动力载荷的作用, 且可以观察出力也发生了波动, 这可能是由于在冰桨相互作用下桨叶附近的水流比较复杂, 伴流场不均匀引起的, 故桨叶与冰未发生切削作用时数值计算值和试验值载荷的变化存在一定差异, 因此, 可以证明在冰载荷数值预报过程中参数的设置具有合理性和准确性.
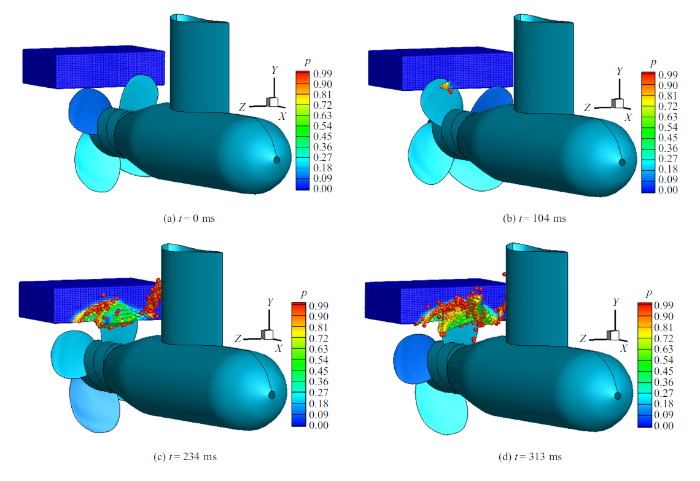
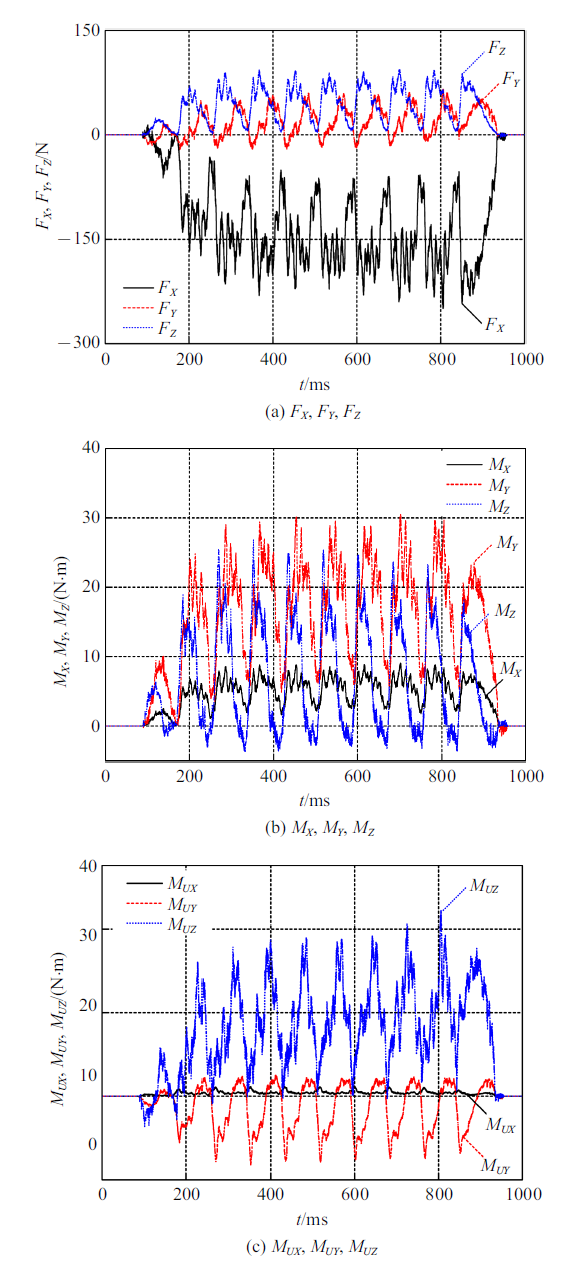
在直航状态模拟过程中, 以冰块推送速度$V=0.2$ m/s, 螺旋桨转速$n=3$ rad/s, 冰桨切削深度$h=35$ mm为例进行分析, 其中, 冰$\!-\!$吊舱推进器切削过程以及冰载荷变化曲线如图13 和图14 所示.
图13
图13
冰$\!-\!$吊舱推进器的切削过程(直航状态)
Fig.13
Milling process of ice-podded propulsor (straight ahead)
图14
图14
吊舱推进器冰载荷随时间的变化曲线 (直航状态)
Fig.14
Ice load curve of podded propulsor with time (straight ahead)
图13 给出了吊舱推进器直航状态与冰切削过程中不同时刻时冰$\!-\!$吊舱推进器的切削状态, 图中冰块的颜色代表其内部键的破坏状态, 蓝色为键未发生断裂, 红色为键发生断裂. 图13 (a)为冰$\!-\!$吊舱推进器开始切削的初始阶段, 此时冰桨未接触, 冰块未发生破碎, 冰物质点全部为蓝色, 与冰的实际运动状态相符. 随着冰块的运动和螺旋桨的旋转, 当$t=104$ ms时, 螺旋桨桨叶与冰块开始接触, 冰块前端的物质点颜色变为红色, 表明此时冰物质点发生了破碎现象. 随着冰块向吊舱推进器逐渐靠近, 桨叶在冰块内部的切削深度逐渐增加, 冰物质点破碎的区域也逐渐增加, 切削后的碎冰体积也相对较大, 如图13 (c)所示. 在图13 (d)中, 桨叶在冰块内部形成的凹槽深度和宽度达到最大, 桨叶切削后的碎冰形状也类似, 冰$\!-\!$螺旋桨的切削过程达到稳定, 因此, 随着冰块的继续运动, 冰桨开始进入稳定性和周期性的切削过程.
由图14 可知, 在$t=100$ ms左右时吊舱推进器冰载荷开始增大, 而冰载荷在$t=100$$\sim$170 s范围内的峰值明显小于其他时间范围, 主要原因是该时间段内冰桨初步接触, 桨叶在冰块内的切削深度较小, 该现象与图13 中冰$\!-\!$吊舱推进器的切削过程相一致. 随着冰与螺旋桨的切削, 吊舱推进器冰载荷在$t=170$$\sim$250 s范围的峰值与在$t=100$$\sim$170 s的冰载荷的峰值相比有所增大, 但仍然小于其他时间段. 当吊舱推进器冰载荷的第3个峰值出现后, 冰载荷开始出现周期性分布, 表明桨叶与冰进入了稳定的切削过程, 与图13 中冰桨接触时冰物质点的破碎现象相对应, 从而证明了吊舱推进器直航状态下与冰切削过程中冰桨接触判断方法的正确性. 将螺旋桨不同方向的轴向力或扭矩进行对比可知, 该工况下螺旋桨$X$轴方向上的力明显大于$Y$轴和$Z$轴, 且$X$轴方向上的力为负值, 表明桨叶叶面与冰物质点的接触面积大于叶背与冰物质点的接触面积, 从而产生了负方向的轴向力. $Y$轴方向上的力为负正交替出现的现象, 该现象与桨叶的切削过程以及坐标系相关, 即桨叶进入冰块时桨叶由下向上切削冰, 桨叶受到的冰载荷向下为负, 而桨叶旋出冰块时桨叶由上向下切削冰, 桨叶受到的冰载荷向上为正. $Z$轴方向上的力始终为正, 即与螺旋桨的旋转方向和$Z$轴的方向相关. 但$X$轴方向上的扭矩明显小于$Y$轴和$Z$轴. 吊舱单元整体扭矩随着时间的变化也呈现出了由小到大再到周期性变化的现象, 与实际情况相符. 通过对比3个方向上吊舱单元扭矩的变化可知, $Z$轴方向上的扭矩大于$Y$轴也大于$X$轴, 主要原因与$X$轴方向上力较大以及支架的长度相关. 此外, 由图14 可知, 在冰$\!-\!$吊舱推进器切削过程中吊舱推进器冰载荷出现了剧烈的波动, 将可能导致舱体内的轴系、推进电机、轴承、密封装置等部件和子系统失效, 对冰区航行船舶的安全航行产生非常大的影响.
4.2 斜航状态下冰$\!-\!$吊舱推进器接触判断方法的应用及分析
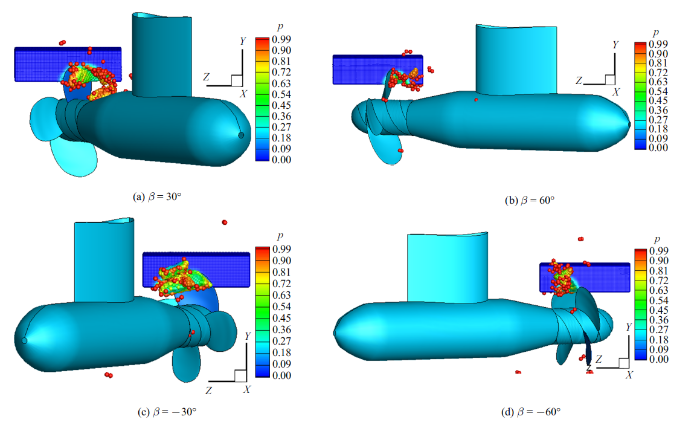
在斜航状态模拟过程中, 吊舱推进器沿整体坐标系中的$Y$轴进行转动, 以吊舱推进器斜航角度$\beta =30^\circ$, 60$^\circ$, $-$30$^\circ$和$-$60$^\circ$ (顺时针为负、逆时针为正)、螺旋桨转速$n=3$ r/s, 冰块运动速度$V=0.2$ m/s、冰桨切削深度$h=35$ mm为例进行分析, 其中, 冰$\!-\!$吊舱推进器切削过程以及冰载荷变化曲线如图15 和图16 所示.
图15
图15
不同斜航角度时冰$\!-\!$吊舱推进器的切削过程
Fig.15
Milling process of the ice-podded propulsor at different angles of azimuthing
图16
图16
吊舱推进器冰载荷随斜航角度的变化
Fig.16
Change of ice load of the podded propulsor with the angle of azimuthing
由图15 可知, 当吊舱推进器斜航状态与冰切削时, 与桨叶接触的冰物质点颜色发生了变化, 未接触的冰物质点颜色仍然为蓝色, 表明接触区域内冰块发生了破碎, 即桨叶与冰物质点能够正常判断. 当吊舱推进器斜航角度$\beta =30^\circ$偏转到$\beta =60^\circ$时, 桨叶抛出的碎冰体积越小, 主要原因是随着吊舱推进器斜航角度的增加, 桨叶与冰块的接触面积越小, 故冰块内部的破碎区域越小. 同时, 在图15 (a)中可以观察出, 桨叶抛出后的碎冰更多地碰撞到舱体上, 将引起吊舱推进器的冰激振动或者瞬时高应力. 因而, 在冰区吊舱推进器设计过程中对舱体前端的厚度进行适当indent 调整. 当斜航角度$\beta =-30^\circ$偏转到$\beta =-60^\circ$时, 桨叶抛出后的碎冰体积也越小, 与$\beta =30^\circ$偏转到$\beta =60^\circ$时的现象相同. 以斜航角度$\beta =30^\circ$和$\beta =-30^\circ$为例, 对比了吊舱推进器逆时针和顺时针偏转相同角度时冰桨的切削过程, 由图15 (a)和图15 (c)可知, 吊舱推进器顺时针转动时桨叶切削后的碎冰体积更大, 即对冰块的破坏程度越大, 主要原因是$\beta =30^\circ$时, 桨叶的旋转方向与冰块的运动方向相反, 桨叶导边逐渐切削冰块. 而当$\beta =-30^\circ$时, 桨叶的旋转方向与冰块的运动方向相同, 且桨叶存在后倾等原因, 使桨叶对冰块的破坏程度更大. 因此, 在吊舱推进器斜航状态破冰过程中, 需要综合考虑吊舱推进器的斜航角度、螺旋桨的旋转方向以及船体的运动方向等因素.
此外, 为了进一步对比吊舱推进器不同斜航角度时冰载荷的变化以及证明接触判断方法的正确性, 展示出了螺旋桨中某一桨叶在$X$轴方向的轴向力和$Y$轴方向的扭矩以及吊舱单元整体在$Y$轴和$Z$轴方向的扭矩, 如图16 所示.
由图16 (a)和图16 (b)可知, 吊舱推进器的斜航角度越小, 螺旋桨轴向力和扭矩越大, 桨叶与冰接触的时间越长. 当吊舱推进器逆时针和顺时针偏转相同角度时, 顺时针偏转时螺旋桨受到的冰载荷较大, 但桨叶与冰的接触时间较短, 与图15 中吊舱推进器顺时针偏转时桨叶切削后的碎冰体积越大相一 致, 证明了本文提出的吊舱推进器斜航状态与冰接触判断方法的正确性. 吊舱单元整体扭矩的变化如图16 (c)和图16 (d)所示, 由图16 (c)可知, 吊舱推进器逆时针转动时, 斜航角度越大, 吊舱单元沿$Y$轴的操舵扭矩越小, 而顺时针转动时, 斜航角度越大, 吊舱单元沿$Y$轴的操舵扭矩越大, 且逆时针和顺时针偏转相同角度时, 顺时针偏转时吊舱单元沿$Y$轴的操舵扭矩较大, 主要原因与顺时针偏转时螺旋桨受到$X$轴方向的轴向力越大相关. 吊舱单元整体扭矩沿$Z$轴方向的变化如图16 (d)所示, 图中展示出吊舱推进器斜航角度越大, 吊舱单元沿$Z$轴的扭矩越小. 吊舱推进器逆时针和顺时针偏转相同角度时, 吊舱单元沿$Z$轴的扭矩差异较小. 因此, 可以得出吊舱推进器顺时针偏转相同角度与冰层切削时对冰的破坏效果较好, 但螺旋桨冰载荷和吊舱单元操舵扭矩较大, 对吊舱推进器结构强度的要求也越高.
4.3 操舵状态下冰$\!-\!$吊舱推进器接触判断方法的应用及分析
在数值模拟过程中, 以吊舱推进器操舵角度范围$\beta =-30^\circ$$\sim$30$^\circ$ (顺时针为负、逆时针为正)、操舵速率$\omega =10(^\circ)$/s、螺旋桨转速$n=3$ r/s、冰层运动速度$V=0.02$ m/s、冰桨切削深度$h=35$ mm为例进行分析, 冰$\!-\!$吊舱推进器切削过程以及冰载荷变化曲线如图17 和图18 所示.
图17
图17
冰$\!-\!$吊舱推进器的切削过程(操舵状态, 仰视图)
Fig.17
Milling process of ice-podded propeller (dynamic azimuthing condition, upward view)
图18
图18
吊舱推进器操舵过程冰载荷变化曲线
Fig.18
Ice load curve of podded propulsor during dynamic azimuthing condition
由图17 可知, 当$t=0$ ms时, 吊舱推进器位于冰层中部, 此时, 吊舱推进器为直航状态, 冰物质点全部呈现为蓝色, 表明冰桨未发生切削. 由图17 (a)到图17 (b)可知, 在吊舱推进器逆时针操舵过程中, 冰物质点始终为蓝色, 表明螺旋桨与冰一直未发生接触, 主要原因是冰层逐渐靠近吊舱推进器, 吊舱推进器逆时针操舵, 使螺旋桨逐渐远离冰层, 导致冰层和螺旋桨之间始终保持一定的距离. 当吊舱推进器达到最大斜航角度时, 如图17 (b)所示, 随着时间的增加, 吊舱推进器开始顺时针转动, 此时, 螺旋桨逐渐靠近平层, 因此, 两者在很短的时间内发生切削作用, 桨叶开展进入冰层, 如图17 (c)所示, 此时, 冰物质点变为红色, 表明海冰发生了破碎, 即螺旋桨与冰发生了切削作用. 随着吊舱推进器的操舵和冰层的运动, 螺旋桨逐渐进入冰层, 切削后的碎冰从桨叶后端抛出. 随着吊舱推进器操舵角度的变化, 被桨叶高速抛出的碎冰与吊舱推进器的支架发生碰撞, 引起吊舱推进器的冰激振动和瞬时高应力, 对吊舱推进器结构的损害非常大, 在冰区吊舱推进器设计过程中需特别注意. 此外, 在图17 (d)中可以清晰地观察出吊舱推进器操舵完成后在冰层内部留出的凹槽.
由图18 可知, 当操舵时间$t<3000$ ms时, 螺旋桨和吊舱单元的冰载荷都为0, 说明此时间范围内冰和螺旋桨未发生接触, 与图17 (a)到图17 (b)的过程相一致. 当3000 ms $<t <4000$ ms时, 吊舱推进器冰载荷逐渐增大, 说明此时桨叶开始逐渐进入冰层, 桨叶与冰的接触面积逐渐增大, 与实际情况相符. 当$t\geqslant 4000$ ms时, 吊舱推进器冰载荷增大的趋势逐渐减小, 表明此时桨叶与冰的接触面积达到最大值, 桨叶在冰层内开始进入稳定的切削阶段. 因此, 通过观察图17 中吊舱推进器与冰层的切削过程和图18 中吊舱推进器冰载荷随时间的变化曲线可以证明本文提出的吊舱推进器操舵过程中冰$\!-\!$吊舱推进器接触判断方法的正确性. 同时, 由图18 可知, 吊舱推进器在$\beta =-30^\circ$$\sim$30$^\circ$范围内操舵时, 螺旋桨$X$轴方向上的轴向力最大, 其次为$Z$轴方向和$Y$轴方向, 而螺旋桨的扭矩则表现为$Y$轴方向上最大, 其次为$Z$轴方向和$X$轴方向. 吊舱单元的扭矩则表现为$Y$轴方向上最大即操舵扭矩最大, 其次为$Z$轴方向和$X$轴方向, 与吊舱推进器的操舵状态、冰桨切削过程、螺旋桨旋转方向以及坐标系的建立相符.
5 结论
本文采用近场动力学方法和面元法耦合开展了不同操纵状态的吊舱推进器与冰切削时接触判断方法的研究, 通过对比吊舱推进器在直航、斜航以及操舵状态与冰的切削过程, 得出的主要结论如下:
(1)吊舱推进器在直航状态与冰切削时, 通过对海冰破碎过程、冰载荷变化曲线以及试验值的对比和描述, 证明了本文提出的冰$\!-\!$吊舱推进器接触判断方法的可靠性、模型建立的正确性以及计算方法的有效性.
(2)吊舱推进器在斜航状态与冰切削时, 通过对比吊舱推进器在不同斜航角度与冰切削时海冰的破碎过程、冰载荷的变化规律证明了吊舱推进器斜航状态时接触判断方法的正确性; 在吊舱推进器斜航状态与冰切削时, 建议吊舱推进器由直航状态逆时针偏转处于斜航状态, 此时, 与冰切削时吊舱推进器受到的冰载荷较小, 对其结构损坏程度也较小.
(3)吊舱推进器在操舵状态与冰切削时, 通过分析冰块的破碎和冰载荷的时程曲线证明了吊舱推进器操舵状态时接触判断方法的正确性; 通过对海冰破碎过程的模拟发现, 桨叶高速抛出的碎冰更多地碰撞到舱体和支架上, 将引起吊舱推进器的冰激振动或者瞬时高应力, 在冰区吊舱推进器设计过程中需特别关注.
本文重点分析了吊舱推进器处于不同操纵状态时螺旋桨与冰的接触判断方法, 未涉及到冰$\!-\!$舱体、冰$\!-\!$支架接触判断方法的研究, 未来针对吊舱推进器的不同操纵状态开展冰$\!-\!$舱体、冰$\!-\!$支架碰撞状态时接触判断方法的研究.
参考文献
View Option
[1]
Niini M . New propulsion technology for arctic tankers
Shipbuilding Technology International 1995 ,5 (4 ):113 -118
[本文引用: 1]
[2]
朱林波 , 刘亮清 , 史志赛 . 全回转推进器应用于破冰/科考船的技术特点、现状及水下噪声控制措施研究
船舶 , 2020 ,5 :51 -58
(Zhu Linbo Liu Liangqing Shi Zhisai . Technical characteristics, state-of-art and underwater- radiated noise control measures for application of azimuth thruster on icebreaking/oceanographic research vessel
Ship & Boat 2020 ,5 :51 -58 (in Chinese))
[3]
黄嵘 , 李文明 , 袁东方 . 极地考察破冰船吊舱推进系统分析及其控制性能仿真研究
极地研究 , 2019 ,31 (4 ):441 -446
[本文引用: 1]
(Huang Rong Li Wenming Yuan Dongfang . Analysis of a podded propulsion system of a polar icebreaker and simulation of its control performance
Chinese Journal of Polar Research 2019 ,31 (4 ):441 -446 (in Chinese))
[本文引用: 1]
[4]
Liu RW Xue YZ Lu XK , et al . Simulation of ship navigation in ice rubble based on peridynamics
Ocean Engineering 2018 ,148 :286 -298
DOI
URL
[本文引用: 1]
[5]
Xue YZ Liu RW Li Z , et al . A review for numerical simulation methods of ship-ice interaction
Ocean Engineering 2020 ,215 :1 -18
[本文引用: 1]
[6]
陆锡奎 . 基于近场动力学与有限元耦合的破冰船冰载荷计算. [硕士论文]
哈尔滨: 哈尔滨工程大学 , 2018 : 59 -61
[本文引用: 1]
(Lu Xikui . Calculation of ice load for icebreaker based on coupling of peridynamic and finite element method. [Master Thesis]
Harbin:Harbin Engineering University , 2018 : 59 -61 (in Chinese))
[本文引用: 1]
[7]
Ye LY Wang C Chang X , et al . Propeller-ice Contact Modeling with Peridynamics
Ocean Engineering 2017 ,139 :54 -64
DOI
URL
[本文引用: 3]
[8]
Ye LY Guo CY Wang C , et al . Prediction of the dynamic pressure distribution on a propeller blade under ice milling
Ocean Engineering 2019 ,188 :1 -12
[9]
Ye LY Guo CY Wang C , et al . Strength assessment method of ice-class propeller under the design ice load condition
International Journal of Naval Architecture and Ocean Engineering 2019 ,11 :542 -552
DOI
URL
[10]
叶礼裕 , 王超 , 常欣 等 . 冰桨接触的近场动力学模型
哈尔滨工程大学学报 , 2018 ,39 (2 ):222 -228
[本文引用: 1]
(Ye Liyu Wang Chao Chang Xi , et al . Peridynamic model for propeller-ice contact
Journal of Harbin Engineering University 2018 ,39 (2 ):222 -228 (in Chinese))
[本文引用: 1]
[11]
季顺迎 , 李紫麟 , 李春花 等 . 碎冰区海冰与船舶结构相互作用的离散元分析
应用力学学报 , 2013 ,30 (4 ):520 -526
[本文引用: 1]
(Ji Shunying Li Zilin Li Chunhua , et al . Analysis of interaction between ice floe and ship hull with discrete element method in broken-ice field
Chinese Journal of Applied Mechanics 2013 ,30 (4 ):520 -526 (in Chinese))
[本文引用: 1]
[12]
李紫麟 , 刘煜 , 孙珊珊 等 . 船舶在碎冰区航行的离散元模型及冰载荷分析
力学学报 , 2013 ,45 (6 ):868 -877
[本文引用: 1]
(Li Zilin Liu Yu Sun Shanshan , et al . Analysis of ship maneuvering performances and ice loads on ship hull with discrete element model in broken-ice fields
Chinese Journal of Theoretical and Applied Mechanics 2013 ,45 (6 ):868 -877 (in Chinese))
[本文引用: 1]
[13]
李紫麟 . 船舶在碎冰区航行的离散元模型及冰载荷分析. [硕士论文]
大连: 大连理工大学 , 2013 : 28 -30
[本文引用: 1]
(Li Zilin . Analysis of ship maneuvering performances and ice loads on ship hull with discrete element model in broken-ice field. [Master Thesis]
Dalian: Dalian University of Technology , 2013 : 28 -30 (in Chinese))
[本文引用: 1]
[14]
刘璐 , 胡冰 , 季顺迎 . 破冰船引航下极地船舶结构冰荷载的离散元分析
水利水运工程学报 , 2020 (3 ):11 -18
[本文引用: 1]
(Liu Lu Hu Bing Ji Shunying . Discrete element analysis of ice loads on polar ships under pilotage of icebreaker
Hydro-Science and Engineering 2020 (3 ):11 -18 (in Chinese))
[本文引用: 1]
[15]
刘璐 , 尹振宇 , 季顺迎 . 船舶与海洋平台结构冰载荷的高性能扩展多面体离散元方法
力学学报 , 2019 ,51 (6 ):1720 -1739
(Liu Lu Yin Zhenyu Ji Shunying . High-performance dilated polyhedral based DEM for ice loads on ship and offshore platform structures
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (6 ):1720 -1739 (in Chinese))
[16]
刘璐 , 龙雪 , 季顺迎 . 基于扩展多面体的离散单元法及其作用于圆桩的冰载荷计算
力学学报 , 2015 ,47 (6 ):1046 -1057
(Liu Lu Long Xue , Ji Shun ying. Dilated polyhedral based discrete element method and its application of ice load on cylindrical pile
Chinese Journal of Theoretical and Applied Mechanics 2015 ,47 (6 ):1046 -1057 (in Chinese))
[17]
龙雪 , 刘社文 , 季顺迎 . 水位变化对正倒锥体冰载荷影响的离散元分析
力学学报 , 2019 ,51 (1 ):74 -84
[本文引用: 1]
(Long Xue Liu Shewen Ji Shunying . Influence of water level on ice load on upward-downward conical structure based on DEM analysis
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (1 ):74 -84 (in Chinese))
[本文引用: 1]
[18]
徐佩 , 郭春雨 , 王超 等 . 基于CFD-DEM耦合的螺旋桨-碎冰-水相互作用的数值模拟
中国造船 , 2019 ,60 (1 ):120 -140
[本文引用: 1]
(Xu Pei Guo Chunyu Wang Chao , et al . Simulation of propeller-trash ice-water interaction using coupling CFD and DEM methods
Shipbuilding of China 2019 ,60 (1 ):120 -140 (in Chinese))
[本文引用: 1]
[19]
Zhou L Wang F Diao F , et al . Simulation of ice-propeller collision with cohesive element method
J. Mar. Sci. Eng 2019 ,7 (349 ):1 -21
DOI
URL
[本文引用: 1]
[20]
Wang F Zou ZJ Zhou L , et al . Numerical simulation of ice milling loads on propeller blade with cohesive element method
Brodogradnja 2019 ,70 (1 ):109 -128
DOI
URL
[本文引用: 1]
[21]
Silling SA Epton M Weckner O , et al . Peridynamic states and constitutive modeling
Journal of Elasticity 2007 ,88 (2 ):151 -184
DOI
URL
[本文引用: 1]
[22]
Silling SA Askari E . A meshfree method based on the peridynamic model of solid mechanics
Computers & Structures 2005 ,83 (17 ):1526 -1535
DOI
URL
[本文引用: 1]
[23]
Oterkus E Guven I Madenci E . Impact damage assessment by using peridynamic theory
Central European Journal of Engineering 2012 ,2 (4 ):523 -531
[本文引用: 1]
[24]
Wang C Xiong WP Chang X , et al . Analysis of variable working conditions for propeller-ice interaction
Ocean Engineering 2018 ,156 :277 -293
DOI
URL
[本文引用: 1]
[25]
Xiong WP Wang C Wang CH , et al . Analysis of shadowing effect of propeller-ice milling conditions with peridynamics
Ocean Engineering 2020 ,195 :106591
DOI
URL
[本文引用: 1]
[26]
叶礼裕 , 王超 , 郭春雨 等 . 潜艇破冰上浮近场动力学模型
中国舰船研究 , 2018 ,13 (2 ):51 -59
[本文引用: 2]
(Ye Liyu Wang Chao Guo Chunyu , et al . Peridynamic model for submarine surfacing through ice
Chinese Journal of Ship Research 2018 ,13 (2 ):51 -59 (in Chinese))
[本文引用: 2]
[27]
陈晓东 , 崔海鑫 , 王安良 等 . 基于巴西盘试验的海冰拉伸强度研究
力学学报 , 2020 ,52 (3 ):625 -634
[本文引用: 1]
(Chen Xiaodong Cui Haixin Wang Anliang , et al . Experimental study on sea ice tensile strength based on Brazilian tests
Chinese Journal of Theoretical and Applied Mechanics 2020 ,52 (3 ):625 -634 (in Chinese))
[本文引用: 1]
[28]
王涵 , 黄丹 , 徐业鹏 等 . 非常规态型近场动力学热黏塑性模型及其应用
力学学报 , 2018 ,50 (4 ):810 -819
[本文引用: 1]
(Wang Han Huang Dan Xu Yepeng , et al . Non-ordinary state-based peridynamic thermal-viscoplastic model and its application
Chinese Journal of Theoretical and Applied Mechanics 2018 ,50 (4 ):810 -819 (in Chinese))
[本文引用: 1]
[29]
Wang J Akinturk A Jones SJ , et al . Ice loads acting on a model podded propeller blade
Journal of offshore Mechanics and Arctic Engineering 2007 ,129 (3 ):236 -244
DOI
URL
[本文引用: 1]
[30]
Wang J Akinturk A Boseb N , et al . Experimental study on a model azimuthing podded propulsor in ice
Journal of Marine Science and Technology 2008 ,13 (3 ):244 -255
DOI
URL
[本文引用: 2]
[31]
Bach C Myland D . An experimental method for model propeller-ice interaction in air: Concept and first results
// ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering. Trondheim, Norway , 2017 : 1 -10
[本文引用: 1]
[32]
Kinnunen A Tikanmäki M Heinonen J , et al . Dynamic ice contact load model for azimuthing thrusters
Ships and Offshore Structures 2019 ,14 (8 ):890 -898
DOI
For ships operating in winter conditions, ice loads are important load scenarios for designing azimuthing main propulsion units. One such contact scenario is ice impacting into an azimuthing thruster. In this paper, the formulation of this type of load scenario is presented and existing calculation methods are investigated. A calculation method for dynamic contact load is proposed for ice impact against the main propulsion unit. The basic principle of the proposed load calculation method is an impact of moving bodies combined with dynamic reaction of the structure. The contact load determination is based on the contact pressure-area relationship between an ice block and a steel structure. The dynamic contact problem is solved with a forward difference method. The method is validated with a controlled laboratory-scale test and the test principle is introduced. The dynamic load model is applied to study the effect of dynamics on the response load level.
[33]
American Bureau of Shipping, ABS . Ice loads on Azimuthing Propulsion Units August
Houston: American Bureau of Shipping , 2020
[本文引用: 1]
[34]
Kinnunen A Koskinen P Tikanmäki M , et al . Azimuthing Thruster Ice Load Calculation, No.VTT-R-08842-12
Helsinki, Finnish Transport Safety Agency , 2012
[本文引用: 1]
[35]
Madenci E Oterkus E . Peridynamic Theory and Its Applications
New York: Springer , 2014
[本文引用: 1]
New propulsion technology for arctic tankers
1
1995
... 极地船舶作为北极冰区安全通行的重要交通工具, 在极地事业中发挥着越来越重要的作用. 而推进系统作为船舶动力核心部分, 其设计和研究需要得到更多关注. 极地船舶破冰航行过程中开辟出来的碎冰航道很快被新的海冰覆盖, 以及航道周围的平整冰引起极地船舶转向和调头困难等问题, 而吊舱推进器具有优于常规的"螺旋桨$+$舵"推进系统的优势, 极大地提高了极地船舶的机动性和操纵性, 很好地解决了上述遇到的问题, 有利于保证极地船舶在冰区航行条件下的航行安全, 成为了极地船舶广泛采用的推进形式[1 -3 ] . 当极地船舶破冰航行时, 特别是尾部破冰时, 不同操纵状态的吊舱推进器与冰层直接发生切削作用, 或船体挤压产生的碎冰卡在吊舱推进器和船体之间使螺旋桨与冰发生连续的切削作用, 从而在螺旋桨上产生极端冰载荷, 导致吊舱推进器结构损坏、性能下降等问题. 因此, 冰区吊舱推进器冰载荷分析成为了吊舱推进器设计的关键. ...
全回转推进器应用于破冰/科考船的技术特点、现状及水下噪声控制措施研究
0
2020
全回转推进器应用于破冰/科考船的技术特点、现状及水下噪声控制措施研究
0
2020
极地考察破冰船吊舱推进系统分析及其控制性能仿真研究
1
2019
... 极地船舶作为北极冰区安全通行的重要交通工具, 在极地事业中发挥着越来越重要的作用. 而推进系统作为船舶动力核心部分, 其设计和研究需要得到更多关注. 极地船舶破冰航行过程中开辟出来的碎冰航道很快被新的海冰覆盖, 以及航道周围的平整冰引起极地船舶转向和调头困难等问题, 而吊舱推进器具有优于常规的"螺旋桨$+$舵"推进系统的优势, 极大地提高了极地船舶的机动性和操纵性, 很好地解决了上述遇到的问题, 有利于保证极地船舶在冰区航行条件下的航行安全, 成为了极地船舶广泛采用的推进形式[1 -3 ] . 当极地船舶破冰航行时, 特别是尾部破冰时, 不同操纵状态的吊舱推进器与冰层直接发生切削作用, 或船体挤压产生的碎冰卡在吊舱推进器和船体之间使螺旋桨与冰发生连续的切削作用, 从而在螺旋桨上产生极端冰载荷, 导致吊舱推进器结构损坏、性能下降等问题. 因此, 冰区吊舱推进器冰载荷分析成为了吊舱推进器设计的关键. ...
极地考察破冰船吊舱推进系统分析及其控制性能仿真研究
1
2019
... 极地船舶作为北极冰区安全通行的重要交通工具, 在极地事业中发挥着越来越重要的作用. 而推进系统作为船舶动力核心部分, 其设计和研究需要得到更多关注. 极地船舶破冰航行过程中开辟出来的碎冰航道很快被新的海冰覆盖, 以及航道周围的平整冰引起极地船舶转向和调头困难等问题, 而吊舱推进器具有优于常规的"螺旋桨$+$舵"推进系统的优势, 极大地提高了极地船舶的机动性和操纵性, 很好地解决了上述遇到的问题, 有利于保证极地船舶在冰区航行条件下的航行安全, 成为了极地船舶广泛采用的推进形式[1 -3 ] . 当极地船舶破冰航行时, 特别是尾部破冰时, 不同操纵状态的吊舱推进器与冰层直接发生切削作用, 或船体挤压产生的碎冰卡在吊舱推进器和船体之间使螺旋桨与冰发生连续的切削作用, 从而在螺旋桨上产生极端冰载荷, 导致吊舱推进器结构损坏、性能下降等问题. 因此, 冰区吊舱推进器冰载荷分析成为了吊舱推进器设计的关键. ...
Simulation of ship navigation in ice rubble based on peridynamics
1
2018
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
A review for numerical simulation methods of ship-ice interaction
1
2020
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
基于近场动力学与有限元耦合的破冰船冰载荷计算. [硕士论文]
1
2018
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
基于近场动力学与有限元耦合的破冰船冰载荷计算. [硕士论文]
1
2018
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
Propeller-ice Contact Modeling with Peridynamics
3
2017
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
... 在吊舱推进器表面离散过程中, 由于其结构、组成比较复杂, 且螺旋桨的表面曲率较大, 给冰$\!-\!$吊舱推进器的接触判断问题带来很大困难. 为了解决冰$\!-\!$吊舱推进器接触判断的问题, 本文借助面元法面元划分的思想, 将吊舱推进器表面进行网格划分来逼近吊舱推进器表面. 根据文献[7 ]中对螺旋桨桨叶网格划分的讨论, 螺旋桨桨叶径向和弦向均采用余弦网格划分, 其中, 余弦网格划分的节点表示为 ...
... 为了减少冰$\!-\!$螺旋桨接触检测的计算量和复杂的运算过程, 同时, 保证接触判断的精度和效率, 根据螺旋桨与冰的接触算法进行吊舱推进器直航状态下螺旋桨与冰物质点的判断[7 ] . 首先, 将冰物质点转换为极坐标的形式, 检测物质点是否位于桨叶叶根和叶梢所包围的范围内, 如果在此范围以外说明冰桨未接触, 否则进行下一步判断, 如图8 (a)所示. 如果在叶根和叶梢所包围的范围内, 再判断物质点是否位于桨叶导边和随边之间的角度方位内, 若不在该方位角内, 说明没有接触, 反之将其定义为可能与螺旋桨接触的物质点, 如图8 (b)所示. ...
Prediction of the dynamic pressure distribution on a propeller blade under ice milling
0
2019
Strength assessment method of ice-class propeller under the design ice load condition
0
2019
冰桨接触的近场动力学模型
1
2018
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
冰桨接触的近场动力学模型
1
2018
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
碎冰区海冰与船舶结构相互作用的离散元分析
1
2013
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
碎冰区海冰与船舶结构相互作用的离散元分析
1
2013
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
船舶在碎冰区航行的离散元模型及冰载荷分析
1
2013
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
船舶在碎冰区航行的离散元模型及冰载荷分析
1
2013
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
船舶在碎冰区航行的离散元模型及冰载荷分析. [硕士论文]
1
2013
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
船舶在碎冰区航行的离散元模型及冰载荷分析. [硕士论文]
1
2013
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
破冰船引航下极地船舶结构冰荷载的离散元分析
1
2020
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
破冰船引航下极地船舶结构冰荷载的离散元分析
1
2020
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
船舶与海洋平台结构冰载荷的高性能扩展多面体离散元方法
0
2019
船舶与海洋平台结构冰载荷的高性能扩展多面体离散元方法
0
2019
基于扩展多面体的离散单元法及其作用于圆桩的冰载荷计算
0
2015
基于扩展多面体的离散单元法及其作用于圆桩的冰载荷计算
0
2015
水位变化对正倒锥体冰载荷影响的离散元分析
1
2019
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
水位变化对正倒锥体冰载荷影响的离散元分析
1
2019
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
基于CFD-DEM耦合的螺旋桨-碎冰-水相互作用的数值模拟
1
2019
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
基于CFD-DEM耦合的螺旋桨-碎冰-水相互作用的数值模拟
1
2019
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
Simulation of ice-propeller collision with cohesive element method
1
2019
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
Numerical simulation of ice milling loads on propeller blade with cohesive element method
1
2019
... 然而, 由于吊舱推进器几何结构比较独特、复杂, 且存在直航、斜航以及操舵等操纵状态, 给冰$\!-\!$吊舱推进器切削过程中的接触判断带来了很大困难. 目前, 针对冰与海洋结构物的接触过程, 研究人员针对不同的研究方法提出了相应的判断方法. 在近场动力学方法研究方面, 薛彦卓等[4 -5 ] 采用将船体和冰设置为近场动力学方法中不同材质物质点的形式, 利用不同材质物质点之间相互排斥产生的排斥力作为船体冰载荷开展了破冰船冰载荷的预报. 陆锡奎[6 ] 提出了一种有限元三角形单元与冰物质点接触的预报方法开展了破冰船冰载荷计算, 通过预判冰物质点是否位于以船壳曲面在船内侧形心为球心的球体内、冰物质点与船壳单元曲面的距离是否小于冰物质点半径以及利用重心法判断冰物质点的投影点是否位于船壳单元曲面内的方法进行了冰物质点与船体的接触判断. 叶礼裕等[7 -10 ] 针对冰区螺旋桨利用近场动力学方法和面元法提出了一种连续接触判断算法, 通过求解面元法向量、冰物质点与面元向量以及平面方程的方式实现了冰桨接触判断, 但仅适用于螺旋桨与冰的某一航行状态. 在离散元方法研究方面, 季顺迎等[11 ] 采用将船体离散为一系列圆盘单元和碎冰简化为三维圆盘的方式开展了船舶在碎冰区航行时冰载荷预报, 通过圆盘之间面$\!-\!$面、面$\!-\!$弧、弧$\!-\!$弧的接触判断以及求解圆盘间作用力的方式计算了船舶冰载荷. 李紫麟等[12 -13 ] 、季顺迎等[14 -17 ] 将船体结构简化为三角形壳单元、碎冰简化为圆盘, 利用面$\!-\!$面、弧$\!-\!$面以及弧$\!-\!$棱的接触判断方式开展了破冰船在碎冰区和平整冰区的冰载荷预报. 王超等[18 ] 基于STAR-CCM$+$软件利用CFD-DEM耦合方法开展了冰$\!-\!$螺旋桨碰撞状态时冰载荷预报, 采用以赫兹$\!-\!$明德林接触理论为基础的非线性弹簧阻尼接触模型直接求解壁面法向力和切向力的方式进行冰载荷计算, 但由于模拟固体断裂方面存在不足, 无法进行冰桨切削状态的计算. 在有限元方法研究方面, 丁仕风等[19 ] 、邹早建等[20 ] 基于LS-DYNA软件开展了冰桨碰撞和切削状态的数值模拟研究, 其中, 冰桨之间的接触判断采用罚函数法, 即首先检查冰块节点是否穿透桨叶主表面, 若未穿透, 不做任何处理. 若穿透, 需要在桨叶主表面和冰从表面之间放置一系列法向弹簧求解冰载荷, 但也仅研究了螺旋桨与冰的某一航行状态. ...
Peridynamic states and constitutive modeling
1
2007
... 近场动力学方法由美国Sandia国家实验室的Silling博士提出的一种无网格方法[21 -22 ] , 他利用积分方式控制方程, 而非偏微分方程求解, 避免了对裂纹尖端位移场求空间导数, 有效地减小了列尖的奇异性, 避免了连续介质力学求解大变形问题的困难, 非常适合于求解材料的大尺度变形问题, 因此, 近场动力学方法模拟冰的破碎具有非常好的优势. ...
A meshfree method based on the peridynamic model of solid mechanics
1
2005
... 近场动力学方法由美国Sandia国家实验室的Silling博士提出的一种无网格方法[21 -22 ] , 他利用积分方式控制方程, 而非偏微分方程求解, 避免了对裂纹尖端位移场求空间导数, 有效地减小了列尖的奇异性, 避免了连续介质力学求解大变形问题的困难, 非常适合于求解材料的大尺度变形问题, 因此, 近场动力学方法模拟冰的破碎具有非常好的优势. ...
Impact damage assessment by using peridynamic theory
1
2012
... 在参考坐标系中, 物质点$ x$的近场动力学运动方程可应用虚功原理推导得出[23 ] , 即 ...
Analysis of variable working conditions for propeller-ice interaction
1
2018
... 为了模拟冰块的断裂、变形以及裂纹形成和延伸的过程, 引入键伸长率的概念来表示物质点之间相互作用力的大小, 即[24 ] ...
Analysis of shadowing effect of propeller-ice milling conditions with peridynamics
1
2020
... 此外, 为了将材料的破坏准则引入到本构方程中, 需要定义一个临界伸长率, 当键的伸长率大于临界伸长率时键发生断裂, 断裂完成后, 物质点之间的力密度为零. 以典型的PMB (prototype micro-elastic brittle)材料为例[25 ] , 其力密度函数表示为 ...
潜艇破冰上浮近场动力学模型
2
2018
... 其中, $G_{0}$是单位断裂面断裂时所释放的键能, $\kappa $是体积模量, $\delta$是物质点的领域半径.
图2 PMB材料力和伸长率的关系<sup>[<xref ref-type="bibr" rid="b26">26</xref>]</sup> Relationship between force and elongation of PMB material<sup>[<xref ref-type="bibr" rid="b26">26</xref>]</sup> Fig.2 ![]()
虽然PMB材料是各向同性的, 但是, 在某一特定条件下, 例如当冰垂向键发生断裂时冰的近场动力学物质点在该方向上相互作用消失, 则其在横向方向能构成承受更大或更小的拉/压应力, 此时, 冰表现出各向异性特征[27 ] . 因此, 引入键断裂的概念去清晰地描述单个物质点的局部损伤, 其定义为 ...
... [
26 ]
Fig.2 ![]()
虽然PMB材料是各向同性的, 但是, 在某一特定条件下, 例如当冰垂向键发生断裂时冰的近场动力学物质点在该方向上相互作用消失, 则其在横向方向能构成承受更大或更小的拉/压应力, 此时, 冰表现出各向异性特征[27 ] . 因此, 引入键断裂的概念去清晰地描述单个物质点的局部损伤, 其定义为 ...
潜艇破冰上浮近场动力学模型
2
2018
... 其中, $G_{0}$是单位断裂面断裂时所释放的键能, $\kappa $是体积模量, $\delta$是物质点的领域半径.
图2 PMB材料力和伸长率的关系<sup>[<xref ref-type="bibr" rid="b26">26</xref>]</sup> Relationship between force and elongation of PMB material<sup>[<xref ref-type="bibr" rid="b26">26</xref>]</sup> Fig.2 ![]()
虽然PMB材料是各向同性的, 但是, 在某一特定条件下, 例如当冰垂向键发生断裂时冰的近场动力学物质点在该方向上相互作用消失, 则其在横向方向能构成承受更大或更小的拉/压应力, 此时, 冰表现出各向异性特征[27 ] . 因此, 引入键断裂的概念去清晰地描述单个物质点的局部损伤, 其定义为 ...
... [
26 ]
Fig.2 ![]()
虽然PMB材料是各向同性的, 但是, 在某一特定条件下, 例如当冰垂向键发生断裂时冰的近场动力学物质点在该方向上相互作用消失, 则其在横向方向能构成承受更大或更小的拉/压应力, 此时, 冰表现出各向异性特征[27 ] . 因此, 引入键断裂的概念去清晰地描述单个物质点的局部损伤, 其定义为 ...
基于巴西盘试验的海冰拉伸强度研究
1
2020
... 虽然PMB材料是各向同性的, 但是, 在某一特定条件下, 例如当冰垂向键发生断裂时冰的近场动力学物质点在该方向上相互作用消失, 则其在横向方向能构成承受更大或更小的拉/压应力, 此时, 冰表现出各向异性特征[27 ] . 因此, 引入键断裂的概念去清晰地描述单个物质点的局部损伤, 其定义为 ...
基于巴西盘试验的海冰拉伸强度研究
1
2020
... 虽然PMB材料是各向同性的, 但是, 在某一特定条件下, 例如当冰垂向键发生断裂时冰的近场动力学物质点在该方向上相互作用消失, 则其在横向方向能构成承受更大或更小的拉/压应力, 此时, 冰表现出各向异性特征[27 ] . 因此, 引入键断裂的概念去清晰地描述单个物质点的局部损伤, 其定义为 ...
非常规态型近场动力学热黏塑性模型及其应用
1
2018
... 近场动力学是一种无网格方法, 其运动方程是一种积分$\!-\!$微分方程, 通常不能得出解析解[28 ] . 因此, 在数值计算过程中通常将物体离散成物质点的形式, 然后对每一个物质点的运动方程进行积分, 方程(1)离散后的每个物质点的运动方程可表示为 ...
非常规态型近场动力学热黏塑性模型及其应用
1
2018
... 近场动力学是一种无网格方法, 其运动方程是一种积分$\!-\!$微分方程, 通常不能得出解析解[28 ] . 因此, 在数值计算过程中通常将物体离散成物质点的形式, 然后对每一个物质点的运动方程进行积分, 方程(1)离散后的每个物质点的运动方程可表示为 ...
Ice loads acting on a model podded propeller blade
1
2007
... 此外, 由于数值计算方法和计算能力的限制, 目前建立冰$\!-\!$流$\!-\!$吊舱推进器耦合计算模型模拟冰区吊舱推进器的实际切削过程有很大难度. 因而, 为了便于开展冰$\!-\!$吊舱推进器切削状态的研究, 本文建立的冰$\!-\!$吊舱推进器切削数值模型忽略了流体的影响. 虽然这种数值模型模拟结果与实际情况存在差异, 无法体现出冰的存在对吊舱推进器水动力性能的影响, 但是能够比较真实地再现切削过程中冰块的破碎和瞬态冰载荷的变化. 根据Wang等[29 -30 ] 开展的系列实验测量数据可以看出, 冰桨切削过程中螺旋桨受到的冰载荷要比水动力载荷高一个量级以上, 水动力载荷对于螺旋桨总载荷的作用几乎可忽略不计. 事实上, 有些学者为了便于分析冰桨切削状态时冰的破碎模式和冰载荷大小, 在空气中开展了冰桨切削实验, Bach等[31 ] 认为研究冰桨接触冰载荷可在空气中开展冰桨铣削实验, 将水动力载荷从总载荷中区分出来, 有利于冰桨铣削过程的基础研究. ...
Experimental study on a model azimuthing podded propulsor in ice
2
2008
... 此外, 由于数值计算方法和计算能力的限制, 目前建立冰$\!-\!$流$\!-\!$吊舱推进器耦合计算模型模拟冰区吊舱推进器的实际切削过程有很大难度. 因而, 为了便于开展冰$\!-\!$吊舱推进器切削状态的研究, 本文建立的冰$\!-\!$吊舱推进器切削数值模型忽略了流体的影响. 虽然这种数值模型模拟结果与实际情况存在差异, 无法体现出冰的存在对吊舱推进器水动力性能的影响, 但是能够比较真实地再现切削过程中冰块的破碎和瞬态冰载荷的变化. 根据Wang等[29 -30 ] 开展的系列实验测量数据可以看出, 冰桨切削过程中螺旋桨受到的冰载荷要比水动力载荷高一个量级以上, 水动力载荷对于螺旋桨总载荷的作用几乎可忽略不计. 事实上, 有些学者为了便于分析冰桨切削状态时冰的破碎模式和冰载荷大小, 在空气中开展了冰桨切削实验, Bach等[31 ] 认为研究冰桨接触冰载荷可在空气中开展冰桨铣削实验, 将水动力载荷从总载荷中区分出来, 有利于冰桨铣削过程的基础研究. ...
... 在数值模拟过程中, 以螺旋桨模型网格划分数目22$\times$22, 冰的密度$\rho =800$ kg/m$^{3}$、泊松比$\mu=0.25$、弹性模量$E=280$ MPa、物质点大小d$x=0.6D/45$、领域半径$\delta =3.015{\rm d}x$[35 ] 、极限伸长率$scr=0.06$、时间步长d$t=3.6\times 10^{-6}$为参数进行设置, 并与Wang等[30 ] 在冰水池内开展的冰$\!-\!$吊舱推进器切削试验进行对比和分析, 对比结果如图12 所示. ...
An experimental method for model propeller-ice interaction in air: Concept and first results
1
2017
... 此外, 由于数值计算方法和计算能力的限制, 目前建立冰$\!-\!$流$\!-\!$吊舱推进器耦合计算模型模拟冰区吊舱推进器的实际切削过程有很大难度. 因而, 为了便于开展冰$\!-\!$吊舱推进器切削状态的研究, 本文建立的冰$\!-\!$吊舱推进器切削数值模型忽略了流体的影响. 虽然这种数值模型模拟结果与实际情况存在差异, 无法体现出冰的存在对吊舱推进器水动力性能的影响, 但是能够比较真实地再现切削过程中冰块的破碎和瞬态冰载荷的变化. 根据Wang等[29 -30 ] 开展的系列实验测量数据可以看出, 冰桨切削过程中螺旋桨受到的冰载荷要比水动力载荷高一个量级以上, 水动力载荷对于螺旋桨总载荷的作用几乎可忽略不计. 事实上, 有些学者为了便于分析冰桨切削状态时冰的破碎模式和冰载荷大小, 在空气中开展了冰桨切削实验, Bach等[31 ] 认为研究冰桨接触冰载荷可在空气中开展冰桨铣削实验, 将水动力载荷从总载荷中区分出来, 有利于冰桨铣削过程的基础研究. ...
Dynamic ice contact load model for azimuthing thrusters
0
2019
Ice loads on Azimuthing Propulsion Units August
1
2020
... 根据吊舱推进器在斜航状态与冰的切削场景[33 -34 ] , 对冰$\!-\!$吊舱推进器计算模型进行简化, 如图6 所示. 假设吊舱推进器绕整体坐标系中的$Y$轴进行偏转, 螺旋桨变为了在斜航状态局部坐标系${O}'_{P}-$ ${X}'_{P}$, ${Y}'_{P}{Z}'_{P}$中绕${X}'_{P} $轴进行旋转, 对于冰块形状和运动状态的假设与吊舱推进器直航状态相同. ...
Azimuthing Thruster Ice Load Calculation, No.VTT-R-08842-12
1
2012
... 根据吊舱推进器在斜航状态与冰的切削场景[33 -34 ] , 对冰$\!-\!$吊舱推进器计算模型进行简化, 如图6 所示. 假设吊舱推进器绕整体坐标系中的$Y$轴进行偏转, 螺旋桨变为了在斜航状态局部坐标系${O}'_{P}-$ ${X}'_{P}$, ${Y}'_{P}{Z}'_{P}$中绕${X}'_{P} $轴进行旋转, 对于冰块形状和运动状态的假设与吊舱推进器直航状态相同. ...
Peridynamic Theory and Its Applications
1
2014
... 在数值模拟过程中, 以螺旋桨模型网格划分数目22$\times$22, 冰的密度$\rho =800$ kg/m$^{3}$、泊松比$\mu=0.25$、弹性模量$E=280$ MPa、物质点大小d$x=0.6D/45$、领域半径$\delta =3.015{\rm d}x$[35 ] 、极限伸长率$scr=0.06$、时间步长d$t=3.6\times 10^{-6}$为参数进行设置, 并与Wang等[30 ] 在冰水池内开展的冰$\!-\!$吊舱推进器切削试验进行对比和分析, 对比结果如图12 所示. ...









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}