空间双臂机器人抓捕翻滚目标后的鲁棒稳定控制1)
A ROBUST STABILIZATION CONTROL FOR DUAL-ARM SPACE ROBOT CAPTURING TUMBLING TARGET1)
空间双臂机器人抓捕翻滚目标后的鲁棒稳定控制1) |
| 夏鹏程, 罗建军, 王明明 |
|
A ROBUST STABILIZATION CONTROL FOR DUAL-ARM SPACE ROBOT CAPTURING TUMBLING TARGET1) |
| Xia Pengcheng, Luo Jianjun, Wang Mingming |
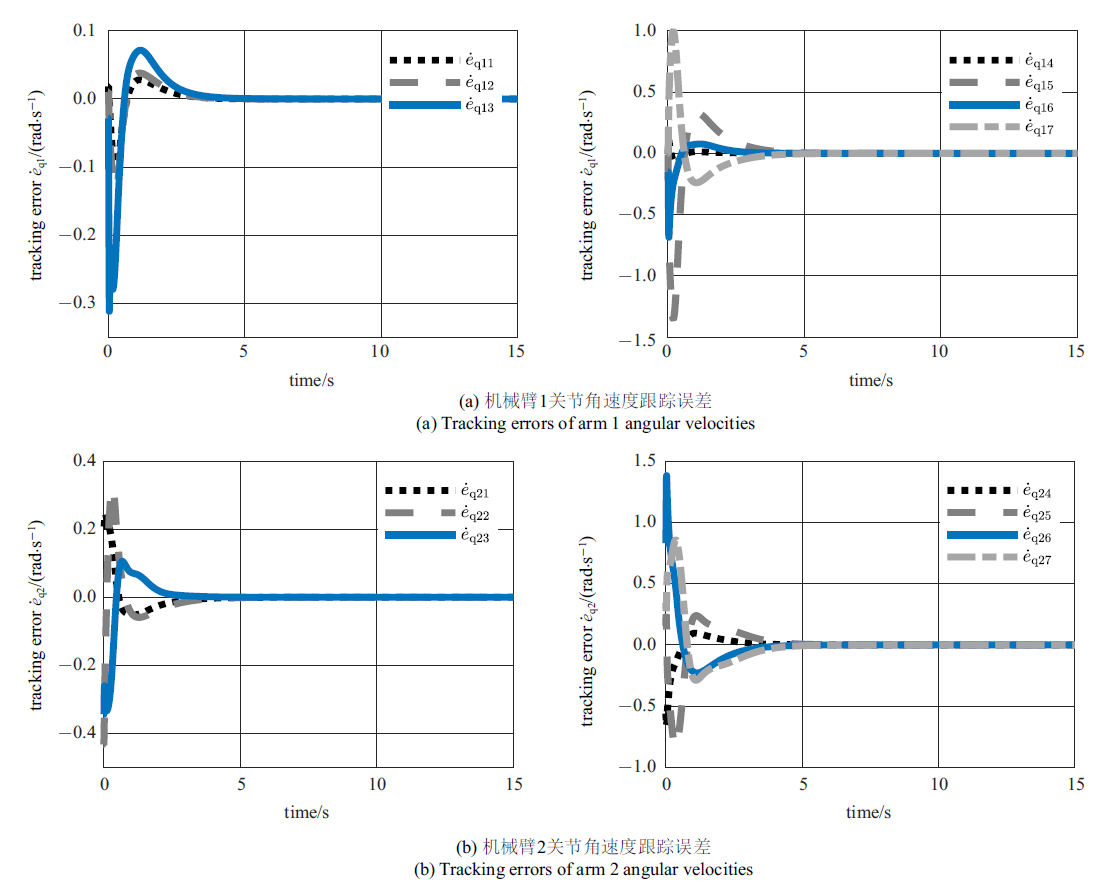
| 图8 利用约束跟踪控制器直接跟踪参考期望轨迹稳定目标运动时的关节角速度跟踪误差 |
| Fig.8 Tracking errors of the joint angular velocities tracking estimated trajectory with the constrained tracking controller |
|
|