空间双臂机器人抓捕翻滚目标后的鲁棒稳定控制1)
A ROBUST STABILIZATION CONTROL FOR DUAL-ARM SPACE ROBOT CAPTURING TUMBLING TARGET1)
空间双臂机器人抓捕翻滚目标后的鲁棒稳定控制1) |
| 夏鹏程, 罗建军, 王明明 |
|
A ROBUST STABILIZATION CONTROL FOR DUAL-ARM SPACE ROBOT CAPTURING TUMBLING TARGET1) |
| Xia Pengcheng, Luo Jianjun, Wang Mingming |
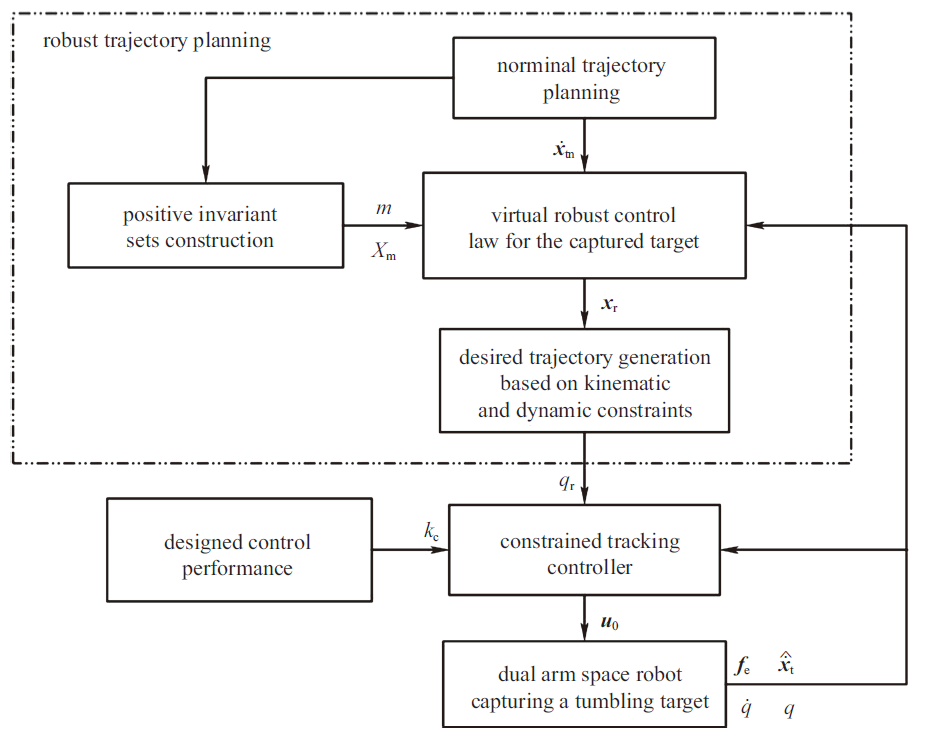
| 图3 鲁棒稳定控制方法结构图 |
| Fig.3 Schematic diagram of the proposed control scheme |
|
|