基于Clamped B样条的空间非合作目标抓捕策略研1)
AN OPTIMAL GRASP PLANNER FOR SPACE ROBOTS USING CLAMPED B-SPLIE1)
基于Clamped B样条的空间非合作目标抓捕策略研1) |
| 王明明, 罗建军, 余敏 |
|
AN OPTIMAL GRASP PLANNER FOR SPACE ROBOTS USING CLAMPED B-SPLIE1) |
| Wang Mingming, Luo Jianjun, Yu Min |
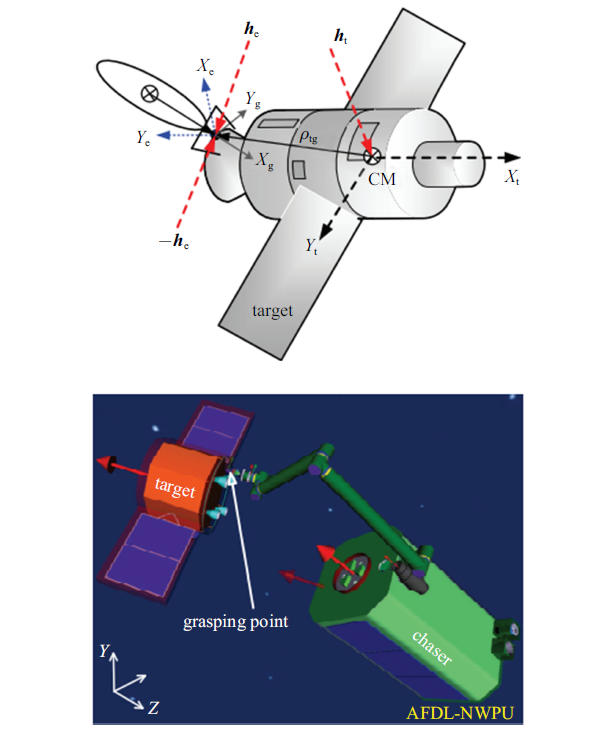
| 图2 抓捕后目标示意图 |
| Fig.2 Schematic diagram of target in post-capture phase |
|
|