基于李群局部标架的多柔体系统动力学建模与计算 1)
DYNAMIC MODELING AND COMPUTATION FOR FLEXIBLE MULTIBODY SYSTEMS BASED ON THE LOCAL FRAME OF LIE GROUP 1)
基于李群局部标架的多柔体系统动力学建模与计算 1) |
| 刘铖, 胡海岩 |
|
DYNAMIC MODELING AND COMPUTATION FOR FLEXIBLE MULTIBODY SYSTEMS BASED ON THE LOCAL FRAME OF LIE GROUP 1) |
| Liu Cheng, Hu Haiyan |
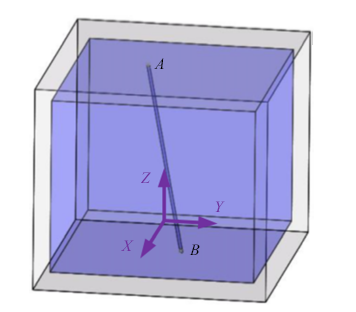
| 图20 刚性杆与空心盒碰撞模型 |
| Fig.20 Contact model between a rigid rod and a hollow box |
|
|