基于李群局部标架的多柔体系统动力学建模与计算 1)
DYNAMIC MODELING AND COMPUTATION FOR FLEXIBLE MULTIBODY SYSTEMS BASED ON THE LOCAL FRAME OF LIE GROUP 1)
基于李群局部标架的多柔体系统动力学建模与计算 1) |
| 刘铖, 胡海岩 |
|
DYNAMIC MODELING AND COMPUTATION FOR FLEXIBLE MULTIBODY SYSTEMS BASED ON THE LOCAL FRAME OF LIE GROUP 1) |
| Liu Cheng, Hu Haiyan |
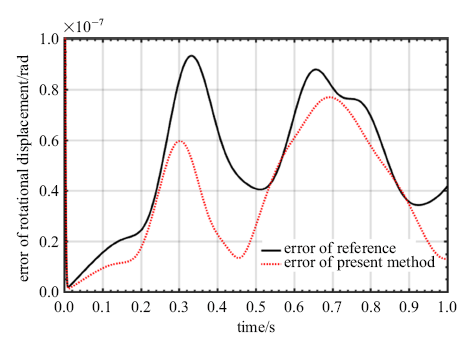
| 图13 基于SE(3)群的广义a方法对刚性双摆模型转动位移的后验误差估计上述基于SE(3)群描述的广义a方法的误差估计方法可直接推广至多柔体系统的动力学仿真中. 但随着系统刚度矩阵与阻尼矩阵的引入,时间离散误差估计值与参考误差将进一步扩大, 但两者的变化趋势依然是一致的. |
| Fig.13 Posterior error estimation of the generalized alpha Lie group SE(3) method for the rotational displacement of a double pendulum |
|
|