基于李群局部标架的多柔体系统动力学建模与计算 1)
DYNAMIC MODELING AND COMPUTATION FOR FLEXIBLE MULTIBODY SYSTEMS BASED ON THE LOCAL FRAME OF LIE GROUP 1)
基于李群局部标架的多柔体系统动力学建模与计算 1) |
| 刘铖, 胡海岩 |
|
DYNAMIC MODELING AND COMPUTATION FOR FLEXIBLE MULTIBODY SYSTEMS BASED ON THE LOCAL FRAME OF LIE GROUP 1) |
| Liu Cheng, Hu Haiyan |
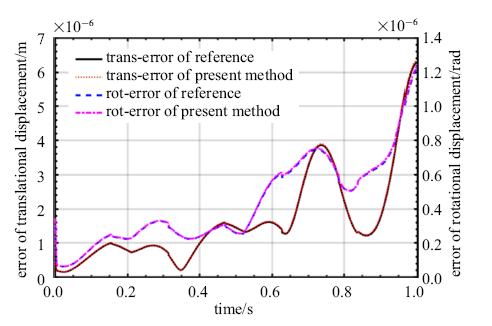
| 图11 基于SE(3)群描述的广义a方法计算单刚体运动的后验误差估计其次, 考察刚性双摆系统, 其几何参数与材料属性与4.1算例(3)中模型完全一致. 设该系统在沿着$Z$轴负方向的重力作用下开始运动.采用基于SE(3)群描述的广义a方法进行仿真计算, 总仿真时间为1 s, 时间步长为$1.0 \times 10^{-3}$ s, 算法参数谱半径为0.8. |
| Fig.11 Posterior error estimation of the generalized alpha method of SE(3) group for a single rigid body |
|
|