

引言
潜艇的隐身性能不仅是保障完成其作战使命的基本性能,更有助于潜艇在海战中更好地发挥其强大的突袭能力.随着如今作战任务多样性的提升, 潜艇不可避免地会涉及到近自由面航行,艇体的分离涡与自由面相互作用, 致使涡结构会在原有结构基础上产生位置偏移,进一步加剧流场的复杂程度, 这对潜艇的隐身性能来说是一项更大的挑战.由于战略战术的需求, 有关潜艇近水面航行的研究逐渐受到重视.近年来随着水动力学研究的深入,越来越多的科研人员通过流场流动细节来寻找影响宏观力及噪声的本质原因.对于精细流场的获取主要有两种途径: 试验测试与数值模拟.其中数值模拟由于成本较低且能获取全场流动信息而受到广泛应用,但其可信程度稍低, 往往需要试验数据加以验证. 随着流场测试技术的不断发展,粒子图像测速(particle image velocimetry,PIV)因其无接触、全局、瞬态测量等优点, 迅速成为研究者的利器[1-4].
由于流场测量困难, 鲜有考虑自由面对潜艇尾流场流动特性影响的试验研究,大都采用数值模拟的方法探究艇体与自由面相互作用的影响.Dawson[17]是详细开展潜艇近自由面航行数值模拟较早的研究者之一. Shariati等[18-19]应用RANS方法对SUBOFF模型多种工况、航速、潜深做了详细研究.近期, Amiri等[20-22]对自由面如何影响潜艇水动力性能进行了系列研究.2019年Carrica等[23]考虑静水环境及波浪环境对Joubert BB2潜艇近自由面自航的水动力性能进行了研究.Tian等[24]研究了不同波浪作用以及不同潜深对水下航行器水动力的影响.在国内, 张楠等[25-28]开展了大量关于潜艇近水面航行数值模拟研究,奠定了国内自由面对潜艇尾流影响数值研究的基础. 随后,逐渐受到各科研高校的关注,涌现出大批有关自由面对潜艇尾流影响的论文[29-34].
采用精细流场测量技术对潜艇绕流场的试验研究很少,有关自由面对潜艇尾流场流动特性影响的研究更是少之又少.本文依托哈尔滨工程大学船模水池实验室,采用先进的水下三维粒子图像测速(stereoscopic particle image velocimetry,SPIV)系统测量潜艇尾流场微观结构, 辅以数值模拟技术观测近自由面航行时表面波系,以此来研究SUBOFF潜艇无限潜深与近水面航行时尾流场特性,通过试验与数值模拟结果相互验证、补充,得到潜艇尾流场流动特征以及随航速与潜深变化的规律,以期为未来潜艇设计提供依据.
1 试验方案
1.1 试验设备与试验模型选取
1.1.1 试验设备
本文依托哈尔滨工程大学船模拖曳水池开展SUBOFF模型尾流场SPIV试验,
基本实验设备如下.
(1)拖曳水池: 长度108 m; 宽度7 m; 水深3.5 m.
(2)拖车: 车速V ≤ 6.5 m/s; 稳速范围: 0.1~6.5 m/s; 精度: 0.1%;通过自主设计并制作的固定装置将试验模型固定在拖车上, 固定方式采用艇尾固定.
(3)水下粒子图像测速系统: 2D-3C SPIV系统.
1.1.2 模型选取
图1

试验所用模型由聚乳酸(PLA)材料经3D打印技术制作而成. 聚乳酸密度为1.20~1.30 kg/L, 弹性模量为3000~4000 MPa, 拉伸强度为40~60 MPa. 由于打印机工作区域限制,整个艇体分三段打印, 最后拼接而成. 首先将艇体表面打磨光顺并喷涂防水涂层,然后对艇体表面进行亚光黑处理, 最后对测量截面附近进行喷涂吸光材料,避免试验过程中激光强反光影响. 由于本次试验采用的潜艇模型缩尺比较小,故在艇体首部$L$/20处加装激流装置以加快艇体表面的层流转淚.经3D打印的实物模型以及喷涂效果如图2所示.
图2

1.2 试验工况的确定
$\begin{eqnarray*} Fr=\frac{U}{\sqrt {gL} } \end{eqnarray*}$
式中, $U$为拖曳航速, $L$为潜艇的特征长度.
测量截面取为桨盘面处, 模型参数及试验工况如表1所示.

1.3 数值模型与网格划分
采用基于有限体积法的STAR-CCM+商业软件进行潜艇流场数值模拟,应用隐式非定常时间推进格式进行非稳态求解, 湍流模型选取分离涡模型(DES),时间步长的选取则充分考虑CFL~1的条件,综合网格空间尺度及时间尺度, 最终选为0.001 s. 由于涉及到近自由面航行,自由表面采用两相体积VOF 方法建模. 控制方程采用基于压力的耦合求解,其中对流项采用二阶迎风格式进行空间离散, 耗散项采用二阶中心差分格式进行离散.计算时长为定为2 s.
计算域如图3所示, 具体设定如下: 速度入口边界距艇首2倍艇长$L$,压力出口距艇尾4倍艇长$L$, 其余边界设为壁面边界条件, 距艇中心10倍艇径$D$.
图3

网格划分采用软件中自带的切割体网格形式, 在艇体周围进行三层局部加密,在主附体交接部分及分离涡发展区域(指挥台围壳后端及十字舵后端)进行局部加密,对潜艇近水面航行时的自由表面和开尔文波形等物理现象也进行加密.边界层网格划分则采用棱柱层网格形式, 并采用All $y+$壁面处理,同时根据不同航速进行棱柱层厚度调整, 保证$y+$值处于1左右范围内.根据不同航速下的兴波程度有针对性地加密自由表面及开尔文波形,最终将网格数控制在1000万左右, 艇体周围各加密区细节如图4所示.
图4

2 潜艇尾流场测量试验
2.1 水下SPIV测量系统
本试验所采用的流场测量设备为DANTEC公司为哈尔滨工程大学船模拖曳水池定制的随车式水下SPIV系统,布置于拖车右侧, SPIV系统规格参数如下: CCD相机分辨率为2048 $\times$ 2048像素;双脉冲Nd-YAG激光器, 最大脉冲频率为15 Hz; 最大脉冲激光能量为1200 mJ; 常规工作能量为200 mJ;激光束持续时长为4 ns; 激光波长为532 nm; 脉冲激光片厚度为0.6 mm;最大测量范围为400 mm $\times$ 400 mm;示踪粒子为聚酰胺颗粒.
该套系统包括一个浸没水中的雷体、两个翼型支架、脉冲式激光器、同步器、图像采集装置、粒子播撒装置等.雷体包含相机及众多反射镜和柱面镜结构, 其内部详细光学结构布置如图5所示.雷体内的两台相机为Dantec公司的FlowSense 4M MKII 12位精度相机组,其使用高性能的逐行扫描行间CCD芯片, 相机的分辨率为2048 $\times$ 2048像素并且具有相同数目的存储单元. 两台相机的镜头参数各不相同, 靠近前端的Camera1镜头为50 mm f/1.8的佳能镜头, 靠近后端的Camera2镜头为85 mm f/1.8的佳能镜头. 支柱1中包含激光导光臂, 支柱2中包含相机线缆支柱结构.
图5

图6

2.2 流场数据采集、测量与分
采用平均直径为50 $\mu$m聚酰胺颗粒(PSP-50)作为示踪粒子, 密度为1.03 g/cm$^{3}$,具有良好的跟随性. 由于拖曳水池尺度较大,如何在拖曳水池进行大范围粒子均匀播撒是一项技术挑战,本试验应用一套自主设计的粒子播撒装置进行示踪粒子播撒, 播撒装置如图7所示.装置上方装有搅拌电机的水箱可以存储大量的水并均匀搅拌粒子,打开水箱下方的阀门后, 粒子沿下方不同管道播撒到水池中,下方每条管道都开有若干小孔, 其潜深可以在水下50 cm范围内自由调节,完全符合潜艇的潜深要求, 在不同深度下均能保证潜艇模型周围存在适量粒子.每航次试验结束后进行示踪粒子补充, 通过相机观测窗口进行粒子浓度判别,保证每次测量过程中平均粒子浓度约为150 g/m$^{3}$即每个查问区域具有15~30个粒子,这样能够增大互相关分析的精确度.
在试验过程中, 脉冲激光照亮待测区域示踪粒子, 相机双帧拍摄,采集频率调至最大采样频率7.5 Hz, 根据不同航速,调整激光(相机)在相邻两帧之间的时间间隔,以保证在此间隔内粒子最大位移不超过查询区域的1/4,每次测量采集的图片数控制在150~200对之间以满足数据收敛性的要求. 试验过程如图8所示.
图7

图8

采用Dantec Studio 6.2软件对试验图片进行批量处理与后续分析.自适应互相关算法获得流场矢量信息, 查询区域大小设置为64 $\times$ 64像素,32 $\times$ 32像素, 16 $\times$ 16像素, 重叠率为50%.邻域验证设置为5 $\times$ 5矩阵, 通过比较矩阵内的向量并启用替换,可以有效过滤掉伪向量并用邻域向量的中值进行插值.通过实时监测迭代步数对结果收敛性的影响, 迭代次数选择为10,检测最少有效粒子数设置为10, 最终得到的相邻速度矢量间距为2.45 mm.
吴铁成[36]应用该SPIV系统在拖曳水池中进行了大量船舶艉流场试验,对该系统不确定度进行分析, 并对KCS标模多工况下伴流场进行测量,与公开数据进行对比, 验证了该系统的准确性.
3 模型试验准确性验证
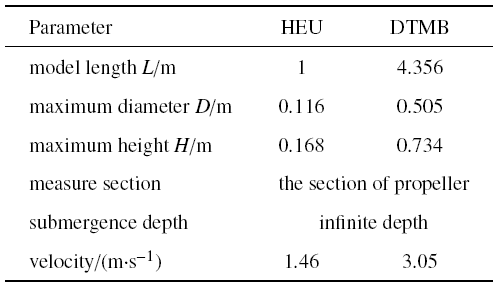
应用泰勒水池的SUBOFF实验数据作为参照, 对本次模型试验及数值计算进行验证.由于测试水池以及PIV测试能力的限制, 模型缩尺比略有不同, 两者主尺度参数见表2.测量航速由$Fr$相似换算得到, 由于此时浸深较大, 自由面影响较小,使用$Fr$相似来确定本试验航速不够严谨. 受试验条件中模型长度及拖曳航速的限制,在今后的试验研究中应尽量满足雷诺数相似条件, 使用更大的模型及航速.
PIV试验得到的轴向速度值普遍小于泰勒水池实验值,将其归结于模型大小引起的尺度效应. 本试验采用的潜艇模型尺度较小,因此相同$Fr$下的$Re$较小, 导致边界层稍厚, 测量得到的速度要小一些.
以泰勒水池的实验值作为参照计算本试验测量的误差值, 最大误差在5%以内.对比发现CFD计算的轴向速度值偏小, 其原因为大部分网格位于自由液面区域,艇体周围网格只能达到四五百万量级, 另外模型太小,模型本身产生的流场特征也较小, 经过一些耗散实际测量到的量就会小很多,而数值模拟条件比较理想化, 模拟出与试验环境相同的真实物理环境还存在差异, 即CFD结果过高估计了马蹄涡的强度, 使得马蹄涡的影响区域增大,造成了桨盘面处偏低的轴向速度. 通过以上流场对比结果来看,本次试验和数值计算结果与泰勒水池标准实验结果吻合良好,因此本试验结果能够应用于后续的研究.
图9

图9
桨盘面0.6$R$处无量纲轴向速度值对比图
Fig.9
Comparison diagram of dimensionless axial velocity value at 0.6$R$ of propeller disk
图10

4 试验结果分析
4.1 不同潜深下螺旋桨盘面速度场分析
图11给出$Fr=0.3$~0.7范围内不同潜深工况下桨盘面轴向速度场, 左为1.5$D$潜深结果, 中间为2.5$D$潜深结果, 右为4$D$潜深结果. 其中空白区域对应桨轴遮挡处的无数据区域.
从图11中可以看出, 本次PIV试验大致描绘出了潜艇桨盘面处流场的几项重要特征. 首先, 速度值呈现出沿径向连续增大的圆圈式形状; 其次, 4个十字舵角度(0$^\circ$, 90$^\circ$, 180$^\circ$, 270$^\circ$)最外侧的速度等值线向外凸出, 速度等值线0.8~0.95范围表现出了十字舵后端由于速度削减效应产生的低速区的存在; 另外, 内侧的速度等值线朝向桨轴中心凹陷, 对应速度等值线范围为0.4~0.8, 这是由于主附体交接部位马蹄涡作用造成动量交换, 使得中心位置动量增大, 两侧动量降低, 从而形成近似"V"型的速度等值线结构. 在径向上表现为马蹄涡将高动量的流体卷携至径向内部, 低动量的流体卷携至径向外部. 大潜深工况下, 随着$Fr$增大, 流场结构特征基本一致.
在1.5$D$潜深工况下, 随着$Fr$增大, 潜艇尾流场依旧存在上述几项重要特征. 进一步比较$Fr$对轴向速度的影响, 可以发现随着$Fr$增大潜艇上方外侧速度等值线有不断向下的趋势, 最外层0.95等值线轮廓位于$Y/R=$1处. 与此同时, 上方等值线整体趋于扁平化, 由指挥台围壳脱落的马蹄涡而形成的速度等值线凸起越来越不明显. 这是由于潜艇近水面航行时, 不同$Fr$下兴波高度不同, 自由面与艇体伴流相互作用.
图11

图11
不同潜深工况下桨盘面轴向速度云图(左侧为1.5$D$潜深工况, 中间为2.5$D$潜深工况, 右侧为4$D$潜深工况)
Fig.11
Axial velocity of propeller disk under different submergence conditions (1.5$D$ submergence depths on the left, 2.5$D$ submergence depths in the middle and 4$D$ submergence depths on the right
图11

图11
不同潜深工况下桨盘面轴向速度云图(左侧为1.5$D$潜深工况, 中间为2.5$D$潜深工况, 右侧为4$D$潜深工况) (续)
Fig.11
Axial velocity of propeller disk under different submergence conditions (1.5$D$ submergence depths on the left, 2.5$D$ submergence depths in the middle and 4$D$ submergence depths on the right (continued)
不同潜深工况下潜艇尾流场流动特征基本类似. 对比4$D$潜深、2.5$D$潜深与1.5$D$潜深桨盘面轴向速度分布, 可以发现在低$Fr$时, 1.5$D$潜深的上部分速度分布呈现较为饱和的半圆形分布, 4$D$潜深的上部分速度有压缩现象, 2.5$D$潜深介于1.5$D$潜深和4$D$潜深之间. 随着$Fr$增大, 自由面主要影响流场的上半区域, 三种潜深工况下的速度均有压缩趋势, 而1.5$D$潜深的压缩现象更为明显, 2.5$D$潜深次之. 在试验过程中, 观察到高速工况对应的兴波越发明显, 速度等值线体现出的特征应与兴波密切相关, 自由面产生了一种挤压作用使得上半区域流场结构整体下移. 由于2.5$D$潜深工况整体特性介于1.5$D$潜深和4$D$潜深之间, 因此下文仅对1.5$D$潜深和4$D$潜深工况展开分析.
4.2 不同航速及潜深下潜艇尾部脉动速度场分析
对比不同潜深下的脉动速度值, 可以看出1.5$D$潜深下的脉动速度云图受自由面影响较大, 在局部上体现出脉动速度极大值点, 同时随着$Fr$增大, 桨盘面上方速度等值线明显下移, 表明受自由面的影响, 较大的脉动速度结构整体下移, 体现出与轴向速度等值线相似的规律.
进一步提取0.6$R$范围内的脉动速度值, 如图14所示, 由于桨轴反光区域遮挡,60$^\circ$~120°范围数据缺失. 从图中可以看出不同潜深工况下桨盘面脉动速度随$Fr$增大所体现出的趋势是相同的.首先, 在每个90°范围内, 脉动速度呈现出先下降后上升的趋势,即对应每个尾舵后方都会出现较大的速度脉动, 具有一定周期性.另外上半部分(0$^\circ$~90$^\circ$范围)的脉动速度值略大于下半部分(90$^\circ$~180$^\circ$范围)的脉动速度值, 这就表明桨轴上方的流场会受到指挥台尾流的影响,从而产生更大的脉动速度. 相比于4$D$潜深工况,1.5$D$潜深时局部上出现脉动速度极大值点, 且不同$Fr$间的脉动速度差值也有所增大,因此可知自由面的引入增大了流动的脉动特性.
图12

图12
1.5$D$潜深不同航速下脉动速度云图
Fig.12
Fluctuating velocity at different speeds of 1.5$D$ depth
图13

图13
4$D$潜深不同航速下脉动速度云图
Fig.13
Fluctuating velocity at different speeds of 4$D$ depth
4.3 对于PIV测试结果的CFD补充与扩展
由于PIV测试难以实现对于潜艇兴波的精确探测, 仅能够对大致波形进行观察以完成粗略的对比,而CFD计算可以精确地模拟出波浪的细节信息. 本小节基于CFD模拟结果, 对潜艇近水面航行所兴起的波浪进行量化分析, 并给出中纵切面的波浪高度, 从而在兴波的角度对潜艇绕流场随航速与潜深的变化规律进行解释.
图14

通过数值模拟发现, 在4$D$潜深时, 兴波高度随航速增大不断提高, 但不同航速对应的波浪峰值差距仅为毫米量级, 完全可以忽略自由表面的影响,因此下文仅对1.5$D$潜深工况进行分析.
从图15可以看出, 不同航速的潜艇兴波具有以下规律: 首先潜艇首部后方存在一个波峰, 且航速越高, 波幅越大. 由于波长随$Fr$增大而增大, 在航速增大的情况下, 兴波波峰的起始位置会向艇后方移动. 同时在潜艇尾肩部存在一波谷, 随着航速变大, 波谷位置同样向后移. 因此在桨盘面位置总体表现为随航速增大而降低的液面高度.
图15

图15
1.5$D$潜深不同速度下潜艇中纵剖面波浪高度对比
Fig.15
Comparison of wave height of longitudinal section in centre plane of submarine at different speeds of 1.5$D$
给出不同潜深及不同航速下的潜艇中纵切面速度云图, 如图16所示,左为1.5$D$潜深工况, 右为4$D$潜深工况.
图16

图16
不同航速下潜艇中纵剖面速度云图(左为1.5$D$, 右为4$D)$
Fig.16
Velocity nephogram of longitudinal section in centre plane of submarine at different speeds (1.5$D$ submergence depths on the left and 4$D$ submergence depths on the right)
通过对比不同潜深工况下速度云图发现, 自由液面存在对流场的最大影响体现在上半区域. 同一航速下, 近水面航行时, 艇体与自由面间流场速度明显增大, 特别在波谷区域(对应桨盘面区域), 流场速度明显提升. 这可以由文丘里效应合理地进行解释, 即受限流动在经过缩小的过流断面时, 流体流速会增大. 由前文可知, 随着$Fr$提升, 桨盘面处的液面高度越来越低, 这就导致了桨盘面位置出现更大的流体速度, 而流速的增大势必会导致伴流场结构的变化.
5 结论
本文应用SPIV系统对潜艇尾部流场进行测试, 同时辅以数值模拟对试验结果进行补充与扩展. 通过对不同潜深工况不同航速的分析得到以下结论:
(1)在1.5$D$潜深工况下, 随着$Fr$增大, 由于自由面产生的挤压作用使得桨盘面上方速度等值线有不断向下的趋势,上方等值线整体趋于扁平化, 由指挥台围壳脱落的马蹄涡形成的速度等值线凸起越来越不明显.
(2)每个尾舵后方都会出现较大的脉动速度, 且具有一定周期性, 在周期内,整体脉动速度呈现先下降后上升的趋势. 受指挥台尾流影响,桨盘面上方流场体现出更大的脉动速度. 自由面会增大流体的脉动特性,在1.5$D$潜深工况的脉动速度云图中存在局部脉动速度极大值点, 同时随着$Fr$增大,桨盘面上方0.04以上的速度等值线明显下移, 表明受自由面的影响,较大的脉动速度结构整体下移.
(3)由于波长随$Fr$增大而变大, 随着航速增大, 兴波波峰的起始位置向艇后方移动.同时在潜艇尾肩部存在一波谷, 随着航速增大大, 波谷位置同样向后移.因此在桨盘面处总体表现为自由面高度随航速增大而降低.
(4)自由面存在时, 艇体与自由面间流场速度明显增大, 特别是波谷区域,也恰好对应桨盘面区域, 流场速度明显提升. 随着$Fr$增大,桨盘面处的液面高度越来越低, 这就导致了桨盘面位置出现更大的流体速度,即造成了桨盘面伴流场挤压现象的发生.
参考文献
近十年来流动测量技术的新发展
New development in the technology of flow measurement over the last decade
几种典型流动测量技术的原理及应用现状
Principle and application status for several kinds of typical technology of flow measurement
Particle Image Velocimetry: A Practical Guide. 2nd ed. Berlin Heidelberg:
Twenty years of particle image velocimetry
The structure of the wake generated by a submarine model in yaw
Asymmetries in the wake of a submarine model in pitch
Experimental and numerical study of a generic conventional submarine at 10°yaw
Wake of a cruciform appendage on a generic submarine at 10°yaw
Experiments and CFD for the propeller wake of a generic submarine operating near the surface
拖曳水池随车式PIV技术的研究与应用
Towing PIV technique and its application in a tank
尾附体与主体连接形式对尾流场不均匀度影响的PIV测试评估
PIV estimation on the nonuniform wake flow caused by different junction forms of stern appendages
水下航行体尾流湍流积分长度PIV测量//中国力学学会办公室编,2013中国力学大会论文集
PIV measurement of turbulent integral length of wake of underwater vehicle// Office of The Chinese Society of Theoretical and Applied Mechanics ed, Proceedings of 2013 China mechanical Congress
基于时序脉动速度空间相关方法的桨盘面湍流积分长度PIV测量//中国力学学会办公室编,第九届全国实验流体力学学术会议论文集
PIV measurement of turbulent length scale on propeller plane based on spatial correlation of fluctuating velocity// Office of The Chinese Society of Theoretical and Applied Mechanics ed, Proceedings of the 9th National Conference on Experimental Fluid Mechanics
潜艇模型尾流场和水动力噪声的测量方法研究
Test method for submarine model's wake field and acoustic signal
An investigation into the effects of submergence depth, speed and hull length-to-diameter ratio on the near surface operation of conventional submarines. [PhD Thesis]
The effect of appendages on the hydrodynamic characteristics of an underwater vehicle near the free surface
Identification of underwater vehicles using surface wave pattern
How does the free surface affect the hydrodynamics of a shallowly submerged submarine?
URANS investigation of the interaction between the free surface and a shallowly submerged underwater vehicle at steady drift
Investigation into the wave system of a generic submarine moving along a straight path beneath the free surface. European Journal of Mechanics-B/
Near-surface self propulsion of a generic submarine in calm water and waves
Numerical research on the influence of surface waves on the hydrodynamic performance of an AUV
潜艇水面与水下粘性绕流数值模拟
Numerical simulation of free surface viscous flow around submarine
潜艇近海底与近水面绕流数值模拟研究
Numerical simulation of flow around submarine operating close to the bottom or near surface
带自由液面的艇/桨干扰特性数值模拟与验证研究
Numerical simulation of hull/propeller interaction with free surface
Numerical simulation of hull/propeller interaction of submarine in submergence and near surface conditions. Journal of Hydrodynamics Ser
近水面航行潜体若干水动力的数值模拟. [硕士论文]
Numerical simulation of some hydrodynamic forces for submerged body advancing near free surface. [Master Thesis]
微小型水下潜器近自由液面操纵性预报. [博士论文]
Maneuverability prediction of mini underwater vehicle near free surface. [PhD Thesis]
AUV的水动力优化及近水面运动性能研究. [博士论文]
Study on AUV hydrodynamic optimization and motion performance near free surface. [PhD Thesis]
近水面航行的欠驱动水下航行器水动力性能研究. [硕士论文]
Research on hydrodynamic performance of under-actuated AUV sailing near water surface. [Master Thesis]
双尾半潜无人艇近水面运动水动力特性研究. [硕士论文]
Research on hydrodynamic characteristics for twin tail semi-submerged unmanned vehicle moving near the free-surface. [Master Thesis]
潜艇尾流空间演化及流场特性仿真分析. [硕士论文]
Simulation of submarine wake evolution and flow field characteristics. [Master Thesis]
海底、海面对水下航行体阻力影响的模型试验研究
Resistance test method on underwater vessel operating close to the bottom or the surface

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}