基于抱爪式对接机构捕获缓冲系统动力学仿真研究
DYNAMIC SIMULATION ANALYSIS OF CAPTURE AND BUFFER SYSTEM BASED ON CLAW-TYPE DOCKING MECHANISM
基于抱爪式对接机构捕获缓冲系统动力学仿真研究 |
| 沈涛, 张崇峰, 王卫军, 冯文博, 邱华勇 |
|
DYNAMIC SIMULATION ANALYSIS OF CAPTURE AND BUFFER SYSTEM BASED ON CLAW-TYPE DOCKING MECHANISM |
| Shen Tao, Zhang Chongfeng, Wang Weijun, Feng Wenbo, Qiu Huayong |
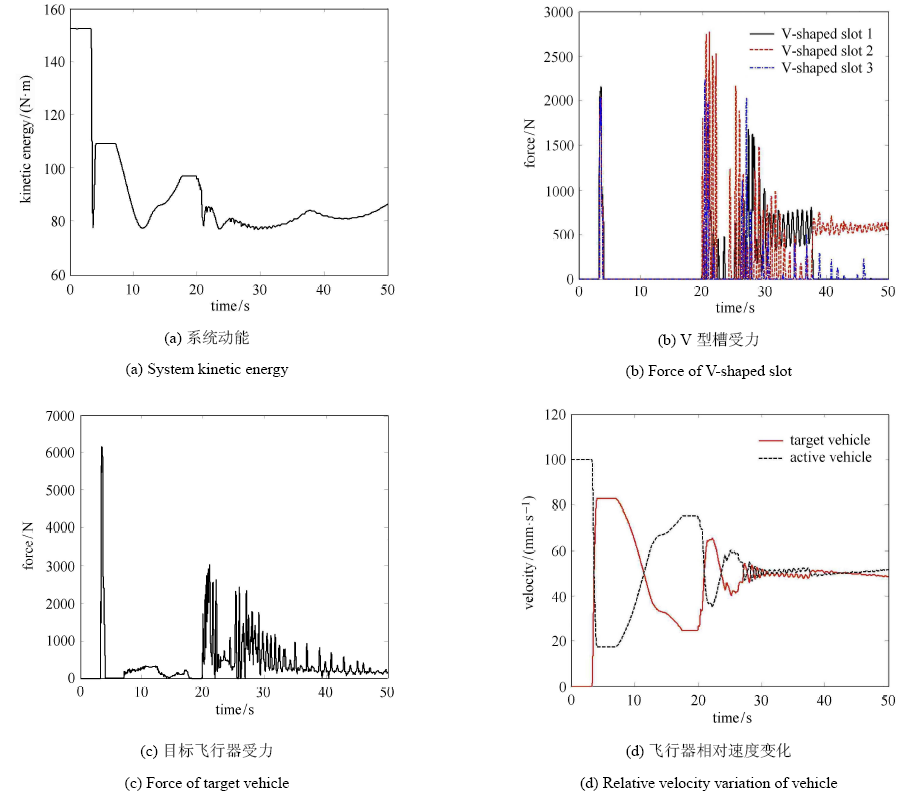
| 图4 工况 1 仿真结果 |
| Fig. 4 Simulation result of 1st working condition |
|
|