基于改进人工势函数的航天器近距离安全控制方法1)
A COLLISION-AVOIDANCE CONTROL ALGORITHM FOR SPACECRAFT PROXIMITY OPERATIONS BASED ON IMPROVED ARTIFICIAL POTENTIAL FUNCTION 1)
基于改进人工势函数的航天器近距离安全控制方法1) |
| 许丹丹, 张进 |
|
A COLLISION-AVOIDANCE CONTROL ALGORITHM FOR SPACECRAFT PROXIMITY OPERATIONS BASED ON IMPROVED ARTIFICIAL POTENTIAL FUNCTION 1) |
| Xu Dandan, Zhang Jin |
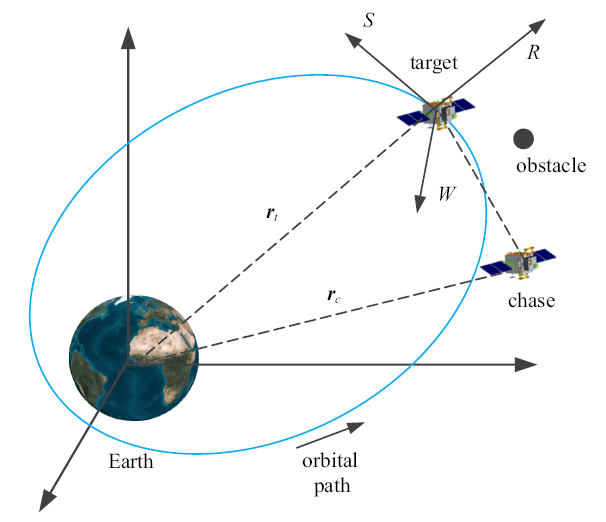
| 图1 相对运动框架 |
| Fig. 1 Relative motion Frame |
|
|