引言
随着我国城镇化进程的加速以及交通基础设施的大规模建设,很大程度上促进了社会经济发展,但也带来了诸多负面影响,例如噪声污染、环境振动等. 交通网络的密集布置使得越来越多的民房和古建筑处于道路沿线,加剧了汽车行驶引起的振动危害. 有鉴于此,深入研究汽车行驶诱发的环境振动响应,并给出可靠的预测模型显得极为重要.
近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型.
基于上述分析,本文在两自由度 1/4 汽车模型的基础上结合郭孔辉[31 ] 提出的弹性滚子接触模型,建立汽车与地基系统的耦合振动模型,并同时考虑车-地之间的竖向和纵向作用,利用 Fourier 和 Laplace 积分变换推导出地表振动位移的解析解. 经过数值计算,系统分析了车速、地面不平度和轮胎包容性对地表振动的影响规律.
1 计算模型
图 1 为 1/4 汽车与地基相互作用的力学模型,车轮沿 $x$ 方向以速度 $c$ 匀速运动,$o$-$x_{1}$ 为固定在车轮上的一维局部坐标系,方向平行于 $x$ 轴,$- r_0 \leqslant x_1 \leqslant r_0 $,$r_0 $ 为轮胎半径. 图中 $m_{1}$,$m_{2}$ 为车身和车轮质量,$z_1 = z_1 ( t)$,$z_2 = z_2 (t)$ 为车身和车轮的竖向位移;$z_0 = z_0 ( t)$ 为地面不平度 (路形函数);$K_{1}$,$C_{1}$ 为汽车悬架刚度系数和阻尼,$K_{\rm w}$,$C_{\rm w}$ 为轮胎刚度系数和阻尼. $2a$,$2b$ 为轮胎着地长度和宽度,其中轮胎半宽 $b$ 为常数,轮胎着地半长 $a = a ( t)$ 为随时间的变化量. 本文着重反映汽车行驶载荷的激励特征,将地基考虑为均质弹性半空间.
图 1
图 1
模型示意图
Fig. 1
Diagram of calculation model
地面不平度 $z_0 (t)$ 采用简谐波函数描述[24 ]
(1) $ z_0 (t) = \bar {B} {\rm e}^{{\rm i}k_0 ct} $
式中,$\bar {B}$ 为路面不平度幅值;波数 $k_0 = \dfrac{2\pi }{L_0 }$,$L_0 $ 为波长. 根据文献[21 ,22 ] ,轮胎压缩量 $\Delta z_{\rm r}$ 表示为
(2) $ \left.\!\!\begin{array}{l} \Delta z_{\rm r} \left( {x_1 ,t} \right) = z_0 \left( {ct + x_1 } \right) + \!\!\sqrt {r_0^2 - x_1^2 } - r_0 - z_2 , \ \ \Delta z_{\rm r} \geqslant 0 \\ \Delta z_{\rm r} \left( {x_1 ,t} \right) = 0 , \ \ \Delta z_{\rm r} < 0 \ \ \hbox{(wheel-ground off)} \end{array}\!\!\right \} $
假设轮胎与地面间的接触力均匀分布,轮-地间的相互作用力可分别由下式表示.
(3) $ q_{\rm d} (t) = \dfrac{1}{4ab}\left( {K_{\rm w} \bar {\Delta }z_{\rm r} + C_{\rm w} \dot {\bar {\Delta }}z_{\rm r} } \right) $
(4) $ f_{\rm d} (t) = \mu _{\rm r} q_{\rm d} $
式中,$\bar {\Delta }z_{\rm r} $ 为轮胎平均压缩量,$\bar {\Delta }z_{\rm r} ( t ) = \int_{ - r_0 }^{r_0 } {\dfrac{\Delta z_{\rm r} }{2r_0 }d x_1 } $;$\dot {\bar {\Delta }}z_{\rm r} $ 表示对时间 $t$ 的一阶导数. $\mu _{\rm r} $为轮胎滚动摩擦系数[31 ] ,$\mu _{\rm r} = \mu _0 + 3.24\mu _{\rm s} \left( {\dfrac{c}{100}} \right)^2$,$\mu _0 $,$\mu _{\rm s} $ 为地面材质相关的基本参数,可查表获得. 根据几何关系,得出轮胎着地长度 $a(t)$ 的表达式为
(5) $ a(t) = \sqrt {r_0^2 - \left( {r_0 - \bar {\Delta }z_{\rm r} } \right)^2} = \sqrt {2r_0 \bar {\Delta }z_{\rm r} - \left( {\bar {\Delta }z_{\rm r} } \right)^2} $
2 问题求解
2.1 汽车系统动力方程及求解
根据 D'alembert 原理,两自由度体系 1/4 汽车系统的运动方程为
(6) $ \left.\!\!\begin{array}{l} m_1 \ddot {z}_1 + C_1 \left( {\dot {z}_1 - \dot {z}_2 } \right) + K_1 \left( {z_1 - z_2 } \right) = 0 \\ m_2 \ddot {z}_2 + C_{\rm w} (\dot {z}_2 - \dot {z}_0 ) + K_{\rm w} \left( {z_2 - z_0 } \right) -\\ \qquad C_1 \left( {\dot {z}_1 - \dot {z}_2 } \right) - K_1 \left( {z_1 - z_2 } \right) = 0 \end{array}\!\! \right \} $
令 $Z_1 = z_1 - z_2 $,$Z_2 = z_2 - z_0 $;则有
(7) $ \left.\!\!\begin{array}{l} z_1 = Z_1 + Z_2 + z_0 , \ \ z_2 = Z_2 + z_0 \\ \dot {z}_1 = \dot {Z}_1 + \dot {Z}_2 + \dot {z}_0 , \ \ \dot {z}_2 = \dot {Z}_2 + \dot {z}_0 \\ \ddot {z}_1 = \ddot {Z}_1 + \ddot {Z}_2 + \ddot {z}_0 , \ \ \ddot {z}_2 = \ddot {Z}_2 + \ddot {z}_0 \end{array}\!\!\right \} $
(8) $ \left.\!\!\begin{array}{l} \ddot {Z}_1 + \ddot {Z}_2 + \dfrac{C_1 }{m_1 }\dot {Z}_1 + \dfrac{K_1 }{m_1 }Z_1 = \omega _0^2 \bar {B} {\rm e}^{{\rm i}\omega _0 t} \\ \ddot {Z}_2 + \dfrac{C_{\rm w} }{m_2 }\dot {Z}_2 + \dfrac{K_{\rm w} }{m_2 }Z_z - \dfrac{C_1 }{m_2 }\dot {Z}_1 - \dfrac{K_1 }{m_2 }Z_1 = \omega _0^2 \bar {B} {\rm e}^{{\rm i}\omega _0 t} \end{array} \!\!\right\} $
(9) $ \left.\!\!\begin{array}{l} Z_1 = A_1 {\rm e}^{{\rm i}\omega _0 t} \\ Z_2 = A_2 {\rm e}^{{\rm i}\omega _0 t} \end{array} \!\!\right\} $
(10) $ \left.\!\!\begin{array}{l} A_1 = \dfrac{\varLambda _1 }{M_1 }\bar {B} \\ A_2 = \dfrac{\varLambda _2 }{M_1 }\bar {B} \end{array}\!\!\right\} $
$$ \begin{array}{l} \varLambda _1 = \dfrac{K_{\rm w} + {\rm i}ck_0 C_{\rm w} }{m_2 \left( {ck_0 } \right)^2} \\ \varLambda _2 = \dfrac{K_1 - m_2 \left( {ck_0 } \right)^2}{m_2 \left( {ck_0 } \right)^2} + \dfrac{{\rm i}C_1 \left( {m_1 + m_2 } \right)}{m_1 m_2 ck_0 }\\ M_1 = \left( {1 - \dfrac{iC_1 }{m_1 ck_0 }} \right)\left( {1 - \dfrac{K_{\rm w} + {\rm i}ck_0 C_{\rm w} }{m_2 \left( {ck_0 } \right)^2}} \right) - \dfrac{K_1 + ick_0 C_1 }{m_2 \left( {ck_0 } \right)^2} \end{array} $$
将式 (10) 依次回代到式 (9)、式 (7)、式 (2) 中,即可确定出轮胎的动态压缩量
(11) $ \left.\!\!\begin{array}{l} \Delta z_{\rm r} \left( {x_1 ,t} \right) = \left[ {\bar {B}\left( {{\rm e}^{{\rm i}k_0 x_1 } -1} \right) - A_2 } \right] {\rm e}^{{\rm i}k_0 ct} + \\ \qquad \sqrt {r_0^2 - x_1^2 } - r_0 , \ \ {\rm real} (\Delta z_{\rm r} ) \geqslant 0 \\ \Delta z_{\rm r} \left( {x_1 ,t} \right) = 0 , \ \ {\rm real} (\Delta z_{\rm r} ) < 0 \end{array}\!\!\right\} $
(12) $ \left.\!\!\begin{array}{l} \bar {\Delta }z_{\rm r} (t) = \left[ {\bar {B}\left( {\dfrac{\sin \left( {r_0 k_0 } \right)}{r_0 k_0 } - 1} \right) - A_2 } \right] {\rm e}^{{\rm i}k_0 ct} + \\ \qquad \left( {\dfrac{\pi }{4} - 1} \right)r_0 , \ \ {\rm real}(\bar {\Delta }z_{\rm r} ) \geqslant 0 \\ \bar {\Delta }z_{\rm r} (t) = 0 , \ \ {\rm real} (\bar {\Delta }z_{\rm r} ) < 0 \end{array}\!\!\right\} $
将式 (12) 分别代入式 (3) $\sim$ 式 (5),则确定出 $q_{\rm d} (t)$,$f_{\rm d} (t)$,$a (t)$.
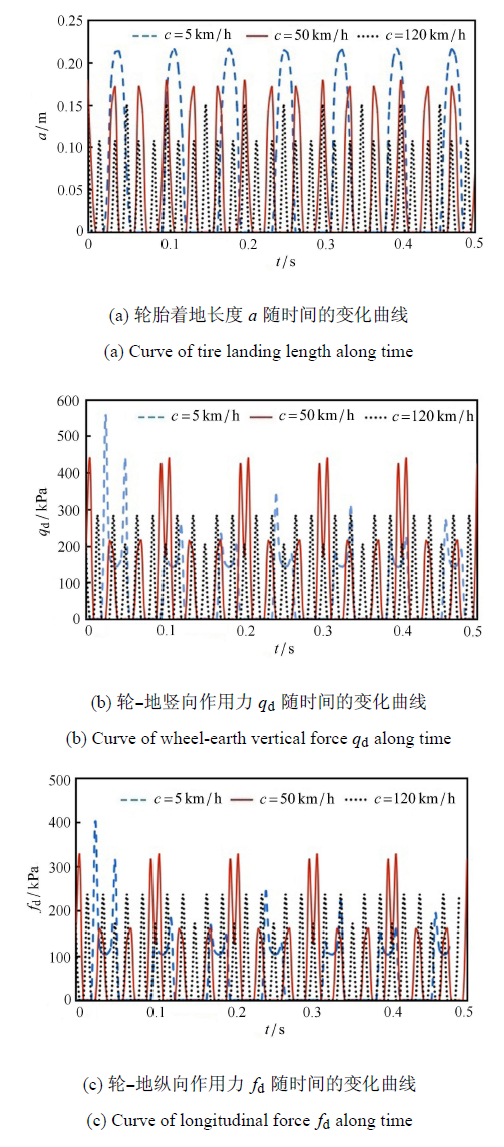
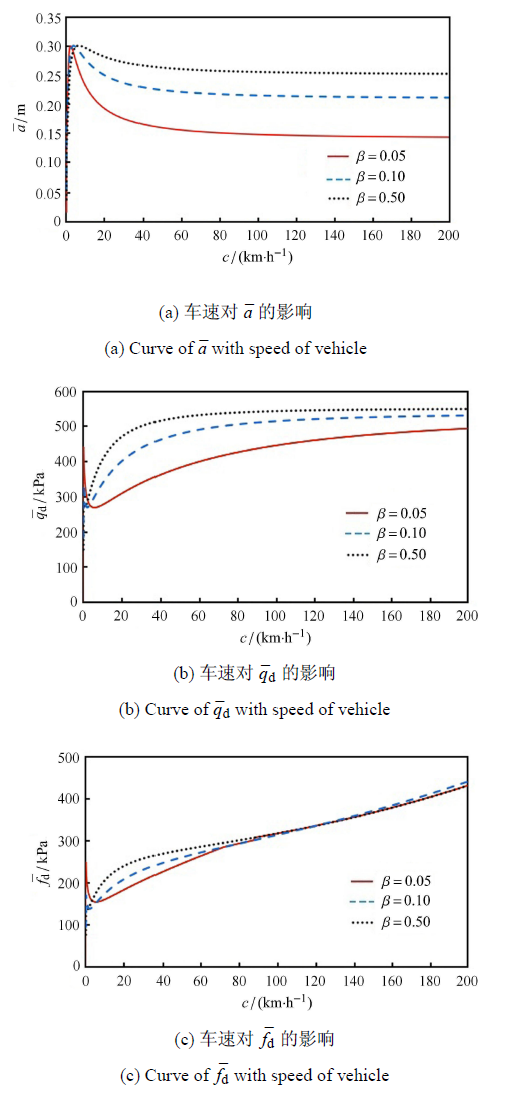
图 2 为不同车速时 $a$,$q_{\rm d}$,$f_{\rm d}$ 随时间的变化曲线 (计算中取 $m_{1} \!=2000$ kg, $m_{2}\! =50$ kg, $K_{1} =1.5 \times 10^{5 }$ N/m, $C_{1} =1.5 \times 10^{4 }$ N$\cdot$s/m; $r_{0} =0.5$ m; 后文均相同). 图中能够发现,当车速增大时这 3 个物理量的波动频率显著加快,但随着车速的增大 $a$,$q_{\rm d}$,$f_{\rm d}$ 的波动幅值没有单调性. 为此,图 3 给出了 3 个物理量波动幅值随车速的变化曲线,并引入地面不平度因子 $\beta = \bar {B}/ {L_0 }$,通过式 (1) 能够看出,$\beta $ 越大表征地面越不平顺. 分析图 3 (a) $\sim$ 图 3 (c) 可知,在低速时 ($c <5$ km/h),3 个物理量的波动幅值 $\bar {a}$,$\bar {q}_{\rm d} $,$\bar {f}_{\rm d} $ 迅速增大并达到峰值,之后随车速增大出现回落. 对于轮胎着地长度,其幅值 $\bar {a}$ 回落后逐渐收敛于稳定值. 而 $\bar {q}_{\rm d}$ 和 $\bar {f}_{\rm d}$ 在回落后发生反弹,$\bar {q}_{\rm d}$ 在车速较高时趋于稳定,而 $\bar {f}_{\rm d} $ 在较高车速时随车速单调递增. 图 3 还反映出,$\bar {a}$ 和 $\bar {q}_{\rm d} $ 的收敛值取决于地面不平度因子 $\beta $, $\beta $ 越大最终收敛值越大. 此外,图 3 (b) 中 $\bar {q}_{\rm d}$ 的曲线形态与文献[18 ] 给出的曲线形态一致,为本文模型提供了验证.
图 2
图 2
$a$,$q_{\rm d}$,$f_{\rm d}$ 随时间的变化曲线
Fig. 2
Curves of parameters $a$,$q_{\rm d}$,$f_{\rm d}$ along time
图 3
图 3
物理量幅值 $\bar {a}$,$\bar {q}_{\rm d}$,$\bar {f}_{\rm d}$ 随车速的变化曲线
Fig. 3
Curves of $\bar {a}$,$\bar {q}_{\rm d}$,$\bar {f}_{\rm d}$ with speed of vehicle
实验研究发现,轮胎充气压力增大,轮胎刚度增大而阻尼减小. 为综合反映轮胎包容性的影响,利用实验拟合公式将轮胎刚度系数 $K_{\rm w}$ 和阻尼系数 $C_{\rm w}$ 统一用轮胎充气压力表示[32 -33 ]
(13) $ \left.\begin{array}{l} K_{\rm w} = 134.3\ln p_{\rm r} - 366.2 \\ C_{\rm w} = - 9.14p_{\rm r} + 3600 \end{array} \right \} $
式中,$p_{\rm r}$ 为轮胎充气压力 (kPa). 图 4 为三物理量幅值 $\bar {a}$,$\bar {q}_{\rm d}$,$\bar {f}_{\rm d}$ 与轮胎充气压力的关系曲线. 图中发现,汽车在中、低速行驶时,胎压对 $\bar {a}$,$\bar {q}_{\rm d}$,$\bar {f}_{\rm d}$ 影响显著;随着 $p_{\rm r} $ 增大,轮胎着地长度 $\bar {a}$ 减小,轮-地作用力 $\bar {q}_{\rm d}$,$\bar {f}_{\rm d}$ 增大. 而高速行驶时,胎压对三物理量幅值几乎无影响.
图 4
图 4
轮胎充气压力对 $\bar {a}$,$\bar {q}_{\rm d}$,$\bar {f}_{\rm d}$ 的影响
Fig. 4
Curves of $\bar {a}$,$\bar {q}_{\rm d}$,$\bar {f}_{\rm d} $ with tire pressure
2.2 地基动力方程及求解
(14) $ \left.\begin{array}{l} \left( {\lambda + G} \right)\dfrac{\partial \theta }{\partial x} + G\nabla ^2u_x - \rho \dfrac{\partial ^2u_x }{\partial t^2} = 0 \\ \left( {\lambda + G} \right)\dfrac{\partial \theta }{\partial y} + G\nabla ^2u_y - \rho \dfrac{\partial ^2u_y }{\partial t^2} = 0 \\ \left( {\lambda + G} \right)\dfrac{\partial \theta }{\partial z} + G\nabla ^2u_z - \rho \dfrac{\partial ^2u_z }{\partial t^2} = 0 \end{array} \right \} $
式中,$u_x $,$u_y $,$u_z $ 为地基中一点的位移分量;$\theta = \dfrac{\partial u_x }{\partial x} + \dfrac{\partial u_y }{\partial y} + \dfrac{\partial u_z }{\partial z}$ 为体应变;$\rho $ 为地基密度;Laplace 算子 $\nabla ^2 = \dfrac{\partial ^2}{\partial x^2} + \dfrac{\partial ^2}{\partial y^2} + \dfrac{\partial ^2}{\partial z^2}$;$\lambda $,$G$ 为 lamb 常数,$\lambda = \dfrac{E\nu }{\left( {1 + \nu } \right)\left( {1 - 2\nu } \right)}$,$G = \dfrac{E}{2\left( {1 + \nu } \right)}$,$E$,$v$ 分别为弹性模量和泊松比.
(15) $ \left.\begin{array}{l} \sigma _{xz} = G\left( {\dfrac{\partial u_z }{\partial x} + \dfrac{\partial u_x }{\partial z}} \right) \\ \sigma _{yz} = G\left( {\dfrac{\partial u_z }{\partial y} + \dfrac{\partial u_y }{\partial z}} \right) \\ \sigma _z = \lambda \theta + 2G\dfrac{\partial u_z }{\partial z} \\ \end{array}\!\! \right \} $
式中,$\sigma _{xz} $,$\sigma _{yz} $,$\sigma _z $ 为地基中一点的应力分量;对时间坐标引入如下 Laplace 变换
(16) $ \hat {f}(x,y,z,s) = \int_0^\infty f(x,y,z,t){\rm e}^{ - st}d t $
式中," $\hat{ \ }$ " 表示对应物理量的 Laplace 变换,$s$ 为变换参数. 对 式 (2) 进行 Laplace 变换后,写为
(17a) $ (\lambda+G) \dfrac{\partial \hat \theta}{\partial x} +G \nabla^2 \hat u_x-\rho s^2 \hat u_x =0 $
(17b) $ (\lambda+G) \dfrac{\partial \hat \theta}{\partial y} +G \nabla^2 \hat u_y-\rho s^2 \hat u_y =0 $
(17c) $ (\lambda+G) \dfrac{\partial \hat \theta}{\partial z} +G \nabla^2 \hat u_z-\rho s^2 \hat u_z =0 $
对式 17(a) $\sim$ 式 17(c) 进行 $\dfrac{\partial }{\partial x}(17{\rm a}) + \dfrac{\partial }{\partial y}(17{\rm b}) + \dfrac{\partial }{\partial z}(17{\rm c})$ 运算,得到
(18) $ \left( {\lambda + 2G} \right)\nabla ^2\hat {\theta } - \rho s^2\hat {\theta } = 0 $
对 $x$, $y$ 坐标引入如下双重 Fourier 变换对
(19) $ \left. \begin{array}{l} \tilde {\tilde {f}}\left( {\xi ,\eta ,z} \right) = \int_{ - \infty }^{ + \infty } {\int_{ - \infty }^{ + \infty } {f\left( {x,y,z} \right)} } {\rm e}^{ - {\rm i}\left( {\xi x + \eta y} \right)} d x d y \\ f\left( {x,y,z} \right) = \dfrac{1}{4\pi ^2}\int_{ - \infty }^{ + \infty } {\int_{ - \infty }^{ + \infty } {\tilde {\tilde {f}}\left( {\xi ,\eta ,z} \right)} } {\rm e}^{{\rm i}\left( {\xi x + \eta y} \right)}d\xi d\eta \end{array} \!\! \right\} $
式中,$\xi $,$\eta $ 为 Fourier 变换参数,"$ \approx $" 表示对应物理量的双重 Fourier 变换. 对式 (18) 进行双重 Fourier 变换,将其化为关于 $\tilde {\tilde {\hat {\theta }}}\left( {\xi ,\eta ,z,s} \right)$ 的二阶常微分方程
(20) $ \left( {\dfrac{d^2}{d z^2} - \xi ^2 - \eta ^2 - \dfrac{\rho s^2}{\lambda + 2G}} \right)\tilde {\tilde {\hat {\theta }}} = 0 $
(21) $ \tilde {\tilde {\hat {\theta }}} = A_3 {\rm e}^{ - r_1 z} $
式中,$r_1 = \sqrt {\xi ^2 + \eta ^2 + \varphi ^2} $,$\varphi ^2 = \dfrac{\rho s^2}{\lambda + 2G}$.
对式 17(a) $\sim$ 式 17(c) 也进行双重 Fourier 变换,并将式 (21) 代入,整理后得到
(22) $ \left.\!\!\begin{array}{l} \left( {\dfrac{d^2}{d z^2} - \xi ^2 - \eta ^2 - \dfrac{\rho s^2}{G}} \right)\tilde {\tilde {\hat {u}}}_x = {\rm i}\xi \left( {\dfrac{\lambda + 2G}{G} - 1} \right)A_3 {\rm e}^{ - r_1 z} \\ \left( {\dfrac{d^2}{d z^2} - \xi ^2 - \eta ^2 - \dfrac{\rho s^2}{G}} \right)\tilde {\tilde {\hat {u}}}_y = {\rm i}\eta \left( {\dfrac{\lambda + 2G}{G} - 1} \right)A_3 {\rm e}^{ - r_1 z} \\ \left( {\dfrac{d^2}{ d z^2} - \xi ^2 - \eta ^2 - \dfrac{\rho s^2}{G}} \right)\tilde {\tilde {\hat {u}}}_y = r_1 \left( {\dfrac{\lambda + 2G}{G} - 1} \right)A_3 {\rm e}^{ - r_1 z} \end{array} \right \} $
求解常微分方程组 (22),得到变换域中地基的位移解
(23) $ \left.\begin{array}{l} \tilde {\tilde {\hat {u}}}_x = - {\rm i}\xi \dfrac{A_3 }{\varphi ^2}{\rm e}^{ - r_1 z} + A_4 {\rm e}^{ - r_2 z} \\ \tilde {\tilde {\hat {u}}}_y = - {\rm i}\eta \dfrac{A_3 }{\varphi ^2}{\rm e}^{ - r_1 z} + A_4 {\rm e}^{ - r_2 z} \\ \tilde {\tilde {\hat {u}}}_z = - r_1 \dfrac{A_3 }{\varphi ^2}{\rm e}^{ - r_1 z} - \dfrac{{\rm i}\left( {\xi A_4 + \eta A_5 } \right)}{r_2 }{\rm e}^{ - r_2 z} \end{array} \right \} $
式中,$r_2 = \sqrt {\xi ^2 + \eta ^2 + \phi ^2} $;$\phi ^2 = \dfrac{\rho s^2}{G}$. $A_{3}\sim A_{5}$ 为 $\xi $, $\eta $, $s$ 的未知函数,由边界条件确定.
对本构方程 (15) 做 Laplace 和 Fourier 变换后,并将式 (21)、式 (23) 代入,得出变换域中地基的应力解
(24) $ \left.\!\!\begin{array}{l} \tilde {\tilde {\hat {\sigma }}}_{xz} = G\Bigg( \dfrac{\partial \tilde {\tilde {\hat {u}}}_x }{\partial z} - {\rm i}\xi \tilde {\tilde {\hat {u}}}_z \Bigg ) \\ \tilde {\tilde {\hat {\sigma }}}_{yz} = G\Bigg( \dfrac{\partial \tilde {\tilde {\hat {u}}}_y }{\partial z} - {\rm i}\eta \tilde {\tilde {\hat {u}}}_z \Bigg) \\ \tilde {\tilde {\hat {\sigma }}}_z = \lambda \tilde {\tilde {\hat {\theta }}} + 2G\dfrac{\partial \tilde {\tilde {\hat {u}}}_z }{\partial z} \\ \end{array} \!\! \right \} $
(25) $ \left. \!\! \begin{array}{l} \sigma _{xz} \left( {x,y,0,t} \right) = - f_{\rm d} H\left ( {a - \left| {x - ct} \right|} \right)H\left( {b - \left| y \right|} \right) \\ \sigma _{yz} \left( {x,y,0,t} \right) = 0 \\ \sigma _z \left( {x,y,0,t} \right) = - q_{\rm d} H\left( {a - \left| {x - ct} \right|} \right)H\left( {b - \left| y \right|} \right) \end{array} \!\! \right \} $
式中,$H\left( \right)$ 表示 Heaviside 阶跃函数. 对式 (25) 进行双重 Fourier 变换和 Laplace 变换后得到
(26) $ \left. \!\!\begin{array}{l} \tilde {\tilde {\hat {\sigma }}}_{xz} \left( {\xi ,\eta ,0,s} \right) = \dfrac{\mu _r \sin \left( {b\eta } \right)}{b\eta }Lp\left( {\xi ,\eta ,s} \right) \\ \tilde {\tilde {\hat {\sigma }}}_{yz} \left( {\xi ,\eta ,0,s} \right) = 0 \\ \tilde {\tilde {\hat {\sigma }}}_z \left( {\xi ,\eta ,0,s} \right) = \dfrac{\sin \left( {b\eta } \right)}{b\eta }Lp\left( {\xi ,\eta ,s} \right) \end{array}\!\! \right \} $
$$ \begin{array}{l} Lp\left( {\xi ,\eta ,s} \right) = \int_0^\infty \dfrac{\sin \left( {a\xi } \right)}{a\xi }\Bigg[ \left( {K_{\rm w} + {\rm i}k_0 cC_{\rm w} } \right)B_1 {\rm e}^{{\rm i}k_0 ct} + \\ \qquad r_0 K_{\rm w} \left( {\dfrac{\pi }{4} - 1} \right) \Bigg ] {\rm e}^{{\rm i}\xi ct}{\rm e}^{ - st} d t \\ B_1 = \bar {B}\left( {\dfrac{\sin \left( {r_0 k_0 } \right)}{r_0 k_0 } - 1} \right) - A_2 \end{array} $$
将式 (23)、式 (24) 代入式 (26),得到
(27) $ \left.\begin{array}{l} \dfrac{2{\rm i}\xi r_1 }{\varphi ^2}A_3 - \left( {r_2 + \dfrac{\xi ^2}{r_2 }} \right)A_4 - \dfrac{\xi \eta }{r_2 }A_5 = \mu _{\rm r} F_{\rm d} \\ \dfrac{2{\rm i}\eta r_1 }{\varphi ^2}A_3 - \dfrac{\xi \eta }{r_2 }A_4 - \left( {r_2 + \dfrac{\eta ^2}{r_2 }} \right)A_5 = 0 \\ \Bigg( \lambda + \dfrac{2Gr_1^2 }{\varphi ^2}\Bigg )A_3 + 2G{\rm i}\left( {\xi A_4 + \eta A_5 } \right) = F_{\rm d} \end{array}\!\! \right \} $
式中,$F_{\rm d} = \dfrac{\sin \left( {b\eta } \right)}{b\eta }Lp\left( {\xi ,\eta,s} \right)$.
求解式 (27),得出 $A_{3} \sim A_{5}$
(28) $ \left.\begin{array}{l} A_3 = \dfrac{\varLambda _3 }{M_2 }\dfrac{\sin \left( {b\eta } \right)}{b\eta }Lp\left( {\xi ,\eta ,s} \right) \\ A_4 = \dfrac{\varLambda _4 }{M_2 }\dfrac{\sin \left( {b\eta } \right)}{b\eta }Lp\left( {\xi ,\eta ,s} \right) \\ A_5 = \dfrac{\varLambda _5 }{M_2 }\dfrac{\sin \left( {b\eta } \right)}{b\eta }Lp\left( {\xi ,\eta ,s} \right) \end{array} \right \} $
$$ \begin{array}{l} \varLambda _3 = \xi ^2 + \eta ^2 + r_2^2 + 2Gi\xi \mu _{\rm r} r_2 \\ \varLambda _4 = \dfrac{2r_1 \left( { {\rm i}\xi r_2 + 2G\mu _r \eta ^2} \right)}{\varphi ^2} - \mu _{\rm r} \Bigg( \lambda + \dfrac{2Gr_1^2 }{\varphi ^2} \Bigg )\left( {r_2 + \dfrac{\eta ^2}{r_2 }} \right) \\ \varLambda _5 = \mu _{\rm r} \xi \eta \dfrac{2Gr_1 \left( {r_1 - 2r_2 } \right) + \lambda \varphi ^2}{r_2 \varphi ^2} + \dfrac{2{\rm i}\eta r_1 r_2 }{\varphi ^2} \\ M_2 = \dfrac{8Gr_1 \xi ^2\eta ^2}{r_2 \varphi ^2} - \dfrac{4Gr_1 r_2 }{\varphi ^2}\Bigg( \xi ^2 + \eta ^2 + \dfrac{2\xi ^2\eta ^2}{r_2^2 } \Bigg) + \\ \qquad \Bigg( \lambda + \dfrac{2Gr_1^2 }{\varphi ^2} \Bigg )\left( {\xi ^2 + \eta ^2 + r_2^2 } \right) \end{array} $$
将 式 (28) 回代到式 (23),则得到地基位移在变换域的解析式
(29) $ \left.\!\!\begin{array}{l} \tilde {\tilde {\hat {u}}}_x = \dfrac{Lp\left( {\xi ,\eta ,s} \right)}{M_2 }\dfrac{\sin \left( {b\eta } \right)}{b\eta }\left( { - {\rm i}\xi \dfrac{\varLambda _3 }{\varphi ^2}{\rm e}^{ - r_1 z} + \varLambda _4 {\rm e}^{ - r_2 z}} \right) \\ \tilde {\tilde {\hat {u}}}_y = \dfrac{Lp\left( {\xi ,\eta ,s} \right)}{M_2 }\dfrac{\sin \left( {b\eta } \right)}{b\eta }\left( { - {\rm i}\eta \dfrac{\varLambda _3 }{\varphi ^2}{\rm e}^{ - r_1 z} + \varLambda _4 {\rm e}^{ - r_2 z}} \right) \\ \tilde {\tilde {\hat {u}}}_z = \dfrac{Lp\left( {\xi ,\eta ,s} \right)}{M_2 }\dfrac{\sin \left( {b\eta } \right)}{b\eta }\cdot \\ \qquad \left[ { - r_1 \dfrac{\varLambda _3 }{\varphi ^2}{\rm e}^{ - r_1 z} - \dfrac{{\rm i}\left( {\xi \varLambda _4 + \eta \varLambda _5 } \right)}{r_2 }{\rm e}^{ - r_2 z}} \right] \end{array} \!\! \right \} $
通过对式 (29) 做双重 Fourier 逆变换和 Laplace 逆变换,并取 $z =0$,则可得到空间域中地表位移 $u_x^0 \left( {x,y,0,t} \right)$, $u_y^0 \left( {x,y,0,t} \right)$, $u_z^0 \left( {x,y,0,t} \right)$.
3 算法验证
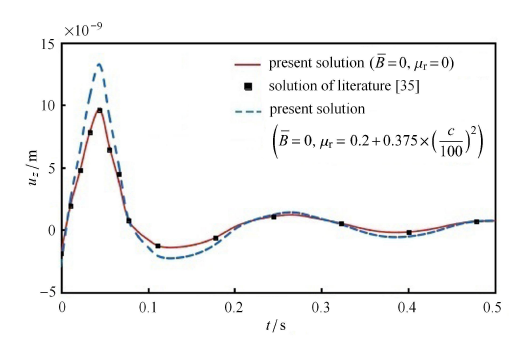
根据前文推导出的公式,编写程序计算地表振动位移,其中 Fourier 逆变换采用离散傅里叶逆变换 (IDFT) 实现,Laplace 逆变换采用 Crump 法[34 ] 做数值反演. 为了进行对比,地基参数取值与文献[35 ] 相同,杨氏模量 $E=2.69\times 10^8$ Pa,密度 $\rho=1550$ kg/m$^3$,泊松比 $\nu=0.257$,$P$ 波波速 $v_P = \sqrt {\left( {\lambda + 2G} \right) / \rho }=459$ m/s,$S$ 波波速 $v_S = \sqrt {G / \rho } =263$ m/s. 通过观察 式 (3)、式 (5)、式 (12) 能够发现,若取地面不平度幅值 $\tilde B=0$,则 $q_{\rm d}$, $a$ 都变为定值,再取轮胎滚动阻力系数 $\mu_{\rm r}= 0$,则 $f_{\rm d} =0$,本文模型即可退化为弹性半空间表面作用移动矩形载荷的地基动力响应问题,退化模型与文献[35 ] 相同. 图 5 为观测点 $A(350,0,0)$ 处的竖向位移,图中显示本文结果与文献解能够很好的吻合. 图 5 还反映出,当同时考虑竖向和纵向作用力时,地表振动位移明显增大.
图 5
图 5
计算结果对比
Fig. 5
Comparison of calculation results
4 数值结果和讨论
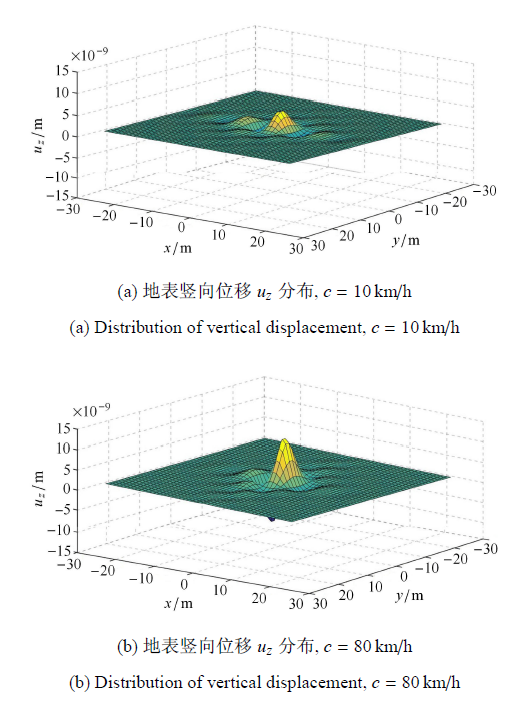
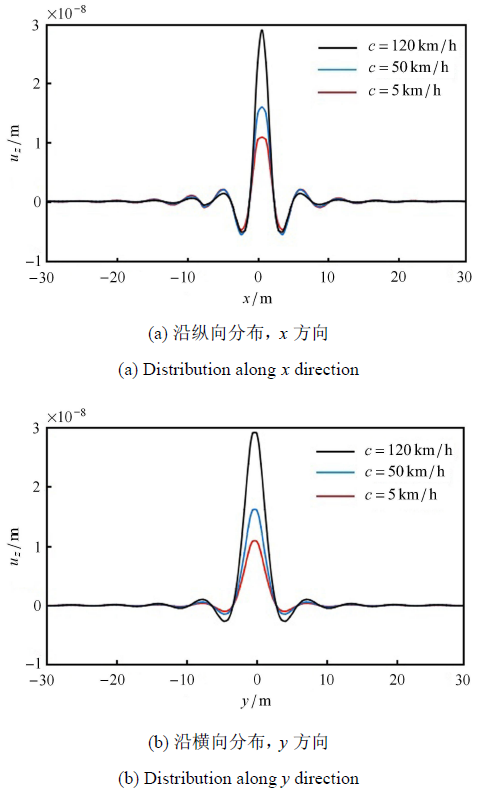
将 2.1 节的汽车模型代入地基模型,即可算出汽车行驶诱发的地基振动位移. 图 6 为计算出的 $t= 0.1$ s 时刻,地表竖向位移 $u_{z}$ 的空间分布,对比图 3 (a) 与图 3 (b) 的位移坐标值可以发现,车速增大时地表位移明显增大. 并且从图 3 (a) 中发现,振动位移沿纵向 ($x$ 方向,汽车行驶方向) 和横向 ($y$ 方向) 的分布存在差异. 为进一步考察该问题,图 7 绘出了振动位移分别沿 $x$, $y$ 方向的衰减曲线. 图中显示,在近场区域,沿纵向分布的振动位移明显大于横向,位移衰减距离也略大于横向. 通过对比图 8 (a) $\sim$ 图 8 (c) 还能发现,汽车行驶速度越低,则振动位移沿纵、横向分布的差异越大. 需补充的是,图 7 和图 8 给出的位移分布曲线与文献[30 ] 的实测曲线分布规律一致,进一步验证了本文模型的可靠.
图 6
图 6
地表竖向位移 $u_{z}$ 空间分布
Fig. 6
Distribution of vertical displacement
图 7
图 7
竖向位移沿纵、横向的分布
Fig. 7
Distribution of vertical displacement along longitudinal and lateral directions
图 8
图 8
不同行驶速度下振动位移纵、横向分布对比
Fig. 8
Distribution comparison between longitudinal and lateral directions at different velocities
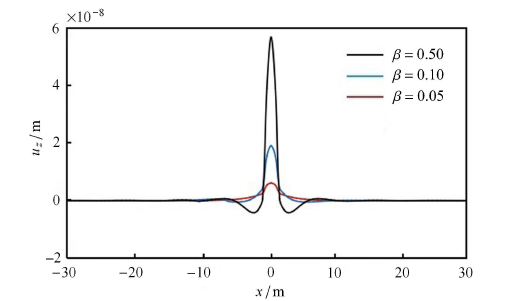
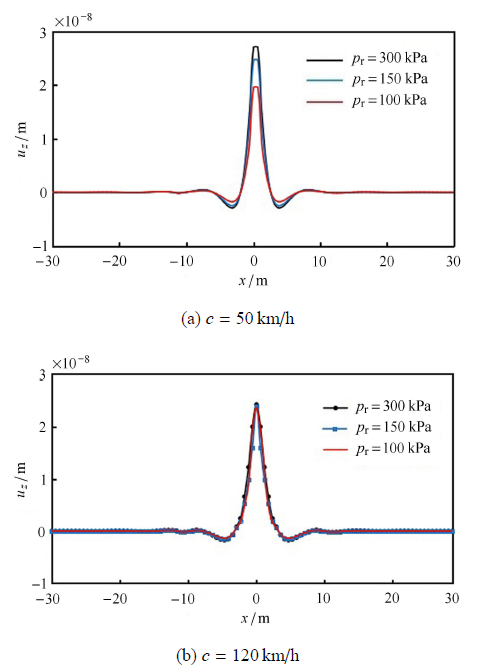
图 9 为不同地面不平度因子 $\beta $ 取值下,地表振动位移的横向分布图,由图可知,地面不平度对地表振动影响非常大,地面越不平顺,振动位移越大,纵向分布具有相同性质. 图 10 反映了轮胎充气压力 $p_{\rm r} $ 对地表振动位移的影响,对比图 10 (a) 和图 10 (b) 发现,汽车在高速行驶时,$p_{\rm r} $ 对地表振动几乎无影响;而在较低车速时产生一定影响,$p_{\rm r} $ 越大,地表振动位移越大.
图 9
图 9
地面不平度对振动位移的影响
Fig. 9
Influence of ground irregularity $\beta $ on vibration displacement
图 10
图 10
轮胎充气压力对地表振动的影响
Fig. 10
Effects of tire pressure on surface vibration
5 结论
利用 1/4 车体模型和弹性滚子接触模型建立 车-地耦合系统的振动分析模型. 模型中所有参数都物理意义明确,均可通过查表或试验确定 (地基参数). 因此,本文给出的模型和算法可以作为一种预测汽车行驶诱发地基振动的理论方法.
文中通过理论推导和数值计算,分别讨论了汽车行驶速度、地面不平度及轮胎充气压力对车-地相互作用和地表振动的影响规律. 可总结出以下几点结论:
(1) 相对而言,车速对于轮-地作用力的峰值影响有限 (尤其高速行驶时),而对载荷激励频率影响较大. 故,车速主要通过改变车-地相互作用的激励频率来影响地表振动.
(2) 地面不平度对车-地相互作用力和地表振动的影响最为显著.
(3)轮胎包容性在较低车速时对车-地相互作用力和地表振动有一定影响,随着车速增大,影响逐渐消失.
参考文献
View Option
[1]
Ren X Wu J Tang Y . Propagation and attenuation characteristics of the vibration in soft soil foundations induced by high-speed trains
Soil Dynamics and Earthquake Engineering 2019 ,117 :374 -383
[本文引用: 1]
[2]
Roshan KM Murty DS . Quantification of ground-vibrations generated by high speed trains in ballasted railway tracks
Transportation Geotechnics 2019 ,20 :10 -24
[3]
Alexandros L Yiannis T Prodromos N . Efficient mitigation of high-speed trains induced vibrations of railway embankments using expanded polystyrene blocks
Transportation Geotechnics 2020 ,22 :3 -12
[4]
边学成 , 陈云敏 . 列车载荷作用下轨道和地基的动响应分析
力学学报 , 2005 ,37 (4 ):477 -484
( Bian Xuecheng Chen Yunmin . Dynamic response analysis of track and foundation under train load
Chinese Journal of Theoretical and Applied Mechanics 2005 ,37 (4 ):477 -484 (in Chinese))
[5]
郭林生 , 文永蓬 , 尚慧琳 等 . 考虑车下设备的城轨车辆弹性车体垂向振动特性研究
振动与冲击 , 2019 ,38 (21 ):97 -103
( Guo Linsheng Wen Yongpeng Shang Huilin , et al . Vertical vibration characteristics of urban rail elastic vehicle body with under-vehicle equipment
Journal of Vibration and Shock 2019 ,38 (21 ):97 -103 (in Chinese))
[6]
崔高航 , 欧阳浩然 , 陶夏新 等 . 城轨沿线地面环境振动响应的半解析有限元求解
振动与冲击 , 2019 ,38 (15 ):109 -114
[本文引用: 1]
( Cui Gaohang Ouyang Haoran Tao Xiaxin , et al . Semi-analytical finite element method for ground environment vibration responses along urban rail
Journal of Vibration and Shock 2019 ,38 (15 ):109 -114 (in Chinese))
[本文引用: 1]
[7]
Cai YQ Sun HL Xu CJ . Steady state responses of poroelastic half-space soil medium to a moving rectangular load
International Journal of Solids and Structures 2007 ,44 (22 ):7183 -7196
[本文引用: 1]
[8]
周华飞 , 蒋建群 . 高速移动载荷下黏弹性半空间体的动力响应
力学学报 , 2007 ,39 (4 ):545 -553
( Zhou Huafei Jiang Jianqiong . Dynamic response of viscoelastic half-space body under high-speed moving loads
Chinese Journal of Theoretical and Applied Mechanics 2007 ,39 (4 ):545 -553 (in Chinese))
[9]
曹志刚 , 孙思 , 袁宗浩 等 . 地表移动载荷对既有地下隧洞动力影响解析研究
岩土工程学报 , 2018 ,40 (12 ):2262 -2273
( Cao Zhigang Sun Si Yuan Zonghao , et al . An analytical study on the dynamic effects of surface moving loads on existing subsurface tunnels
Chinese Journal of Geotechnical Engineering 2018 ,40 (12 ):2262 -2273 (in Chinese))
[10]
王立安 , 赵建昌 , 侯小强 等 . 非均匀饱和半空间的 Lamb 问题
岩土力学 , 2020 ,41 (5 ):1 -9
[本文引用: 1]
( Wang Lian Zhao Jianchang Hou Xiaoqiang , et al . Lamb problem for non-homogeneous saturated half space
Rock and Soil Mechanics 2020 ,41 (5 ):1 -9 (in Chinese))
[本文引用: 1]
[11]
Fryba L . Dynamic interaction of vehicles with trucks and roads
Vehicle System Dynamics 1987 ,16 :129 -138
[本文引用: 1]
[12]
孙璐 , 邓学均 . 速度与车辆动态特性对于车路相互作用的影响
土木工程学报 , 1997 ,30 (34 ):40 -48
[本文引用: 1]
( Sun Lu Deng Xuejun . The influence of velocity and vehicle dynamic characteristics on vehicle-road interaction
China Civil Engineering Journal 1997 ,30 (34 ):40 -48 (in Chinese))
[本文引用: 1]
[13]
孙璐 , 邓学均 . 移动的车辆随机载荷作用下梁桥的瞬态响应
振动与冲击 , 1997 ,16 (1 ):62 -68
[本文引用: 1]
( Sun Lu Deng Xuejun . Transient response of girder bridges under random load of moving vehicles
Journal of Vibration and Shock 1997 ,16 (1 ):62 -68 (in Chinese))
[本文引用: 1]
[14]
黄新艺 , 卓卫东 , 魏祥湘 . 移动车辆作用对公路连续梁桥地震反应特性的影响
振动与冲击 , 2019 ,30 (5 ):837 -848
[本文引用: 1]
( Huang Xinyi Zhuo Weidong Wei Xiangxiang . The influence of moving vehicles on the seismic response characteristics of highway continuous girder bridge
Journal of Vibration and Shock 2019 ,30 (5 ):837 -848 (in Chinese))
[本文引用: 1]
[15]
Cai YQ Chen Y Cao Z . Dynamic responses of a saturated poroelastic half-space generated by a moving truck on the uneven pavement
Soil Dynamics and Earthquake Engineering 2015 ,69 :172 -181
[本文引用: 1]
[16]
Liu HB Kim D . Simulating the uncertain environmental impact of freight truck shifting programs
Atmospheric Environment 2019 ,214 (1 ):8 -16
[本文引用: 1]
[17]
Cyriaque AO Tan YQ Zhou XY . Numerical investigation of the mechanical response of semi-rigid base asphalt pavement under traffic load and nonlinear temperature gradient effect
Construction and Building Materials 2020 ,235 (28 ):135 -147
[本文引用: 1]
[18]
Zhi L Qian J Shi Z , et al . Dynamic responses of layered poroelastic ground under moving traffic loads considering effects of pavement roughness
Soil Dynamics and Earthquake Engineering 2020 ,130 :1 -13
[本文引用: 2]
[19]
陈瑶 , 蔡袁强 , 曹志刚 等 . 不平顺路面对交通载荷引起的地基振动影响
浙江大学学报(工学版) , 2019 ,53 (56 ):1031 -1039
[本文引用: 1]
( Chen Yao Cai Yuanqiang Cao Zhigang , et al . The uneven road is affected by the vibration of foundation caused by traffic load
Journal of Zhejiang University (Engineering Science )2019 ,53 (56 ):1031 -1039 (in Chinese))
[本文引用: 1]
[20]
孙加亮 , 田强 , 胡海岩 . 多柔体系统动力学建模与优化研究进展
力学学报 , 2019 ,51 (6 ):1565 -1586
[本文引用: 1]
( Sun Jialiang Tian Qiang Hu Haiyan . Advances in dynamic modeling and optimization of flexible multibody systems
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (6 ):1565 -1586 (in Chinese))
[本文引用: 1]
[21]
Guo KH . Tire roller contact model for simulation of vehicle vibration input
SAE Technical Papers , 1993 ,932008
[本文引用: 2]
[22]
郭孔辉 , 刘青 , 丁国峰 . 轮胎包容特性分析及其在汽车振动系统建模中的应用
汽车工程 , 1999 ,21 (2 ):65 -71
[本文引用: 1]
( Guo Konghui Liu Qing Ding Guofeng . Analysis of tire inclusion characteristics and its application in automobile vibration system modeling
Automotive Engineering 1999 ,21 (2 ):65 -71 (in Chinese))
[本文引用: 1]
[23]
郭孔辉 , 杨一洋 . 轮胎力学特性试验台的运动学分析
机械工程学报 , 2013 ,49 (20 ):63 -70
( Guo Konghui Yang Yiyang . Kinematic analysis of tire mechanical characteristics test bench
Journal of Mechanical Engineering 2013 ,49 (20 ):63 -70 (in Chinese))
[24]
郭孔辉 . 汽车操纵动力学 . 长春 : 吉林科学技术出版社 , 1991
[本文引用: 2]
( Guo Konghui Vehicle steering dynamics . Changchun : Jilin Science and Technology Press , 1991 )
[本文引用: 2]
[25]
胡海岩 . 论力学系统的自由度
力学学报 , 2018 ,50 (5 ):1135 -1144
[本文引用: 1]
( Hu Haiyan . On the degrees of freedom of a mechanical system
Chinese Journal of Theoretical and Applied Mechanics 2018 ,50 (5 ):1135 -1144 (in Chinese))
[本文引用: 1]
[26]
刘志浩 , 高钦和 . 考虑充气压力效应的重载轮胎面内振动模态建模及参数辨识
振动与冲击 , 2018 ,37 (18 ):184 -192
[本文引用: 1]
( Liu Zhihao Gao Qinhe . Modeling and parameter identification of vibration modes in heavy duty tires considering the effect of air pressure
Journal of Vibration and Shock 2018 ,37 (18 ):837 -848 (in Chinese))
[本文引用: 1]
[27]
刘志浩 , 高钦和 , 于传强 等 . 重载轮胎面内欧拉梁模型及耦合振动特性研究
振动工程学报 , 2019 ,32 (1 ):107 -119
[本文引用: 1]
( Liu Zhihao Gao Qin Yu Chuanqiang , et al . Study on the model of euler beam and coupling vibration characteristics of heavy duty tire
Journal of Vibration and Shock 2019 ,32 (1 ):107 -119 (in Chinese))
[本文引用: 1]
[28]
范纪华 , 章定国 , 谌宏 . 基于绝对节点坐标法的弹性线方法研究
力学学报 , 2019 ,51 (5 ):1455 -1465
[本文引用: 1]
( Fan Jihua Zhang Dingguo Shen Hong . Research on elastic line method based on absolute nodal coordinate method
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (5 ):1455 -1465 (in Chinese))
[本文引用: 1]
[29]
叶茂 , 任珉 , 谭平 等 . 城市道路交通诱发建筑结构振动的实测和数值模拟
应用力学学报 , 2013 ,30 (3 ):463 -468
[本文引用: 1]
( Ye Mao Ren Min Tan Ping , et al . Measurement and numerical simulation of building structure-induced vibration of urban road traffic
Chinese Journal of Applied Mechanics 2013 ,30 (3 ):463 -468 (in Chinese))
[本文引用: 1]
[30]
贾宝印 , 楼梦麟 , 宗刚 等 . 车辆载荷引起地面振动的实测研究
振动与冲击 , 2013 ,32 (4 ):10 -14
[本文引用: 2]
( Jia Baoyin Lou Menglin Zong Gang , et al . Field measurements for ground vibration induced by vehicle
Journal of vibration and Shock 2013 ,32 (4 ) : 10 -14 (in Chinese))
[本文引用: 2]
[31]
Thomas D . 车辆动力学基础 . 赵六奇译. 北京 : 清华大学出版社 , 2006
[本文引用: 2]
( Thomas D . Fundamentals of Vehicle Dynamics . Zhao Liuqi (translated). Beijin : Tsinghua University Press , 2006 (in Chinese))
[本文引用: 2]
[32]
季学武 , 高义民 , 裘熙定 . 轮胎动刚度和阻尼特性的研究
汽车工程 , 1994 ,16 (5 ):315 -321
[本文引用: 1]
( Ji Xuewu Gao Yimin Qiu Xiding . Research on dynamic stiffness and damping characteristics of tire
Automotive Engineering 1994 ,16 (5 ):315 -321 (in Chinese))
[本文引用: 1]
[33]
聂信天 , 史立新 , 顾浩 等 . 农用轮胎径向刚度和阻尼系数试验研究
南京农业大学学报 , 2011 ,34 (5 ):139 -143
[本文引用: 1]
( Nie Xinting Shi Lixin Gu Hao , et al . Research on the radial stiffness and damping of tractor coefficient tires through test
Journal of Nanjing Agricultural University 2011 ,34 (5 ):139 -143 (in Chinese))
[本文引用: 1]
[34]
何光渝 , 王卫红 . 精确的拉普拉斯数值反演方法及其应用
石油学报 , 1995 ,16 (1 ):96 -104
[本文引用: 1]
( He Guangyu Wang Weihong . Precise Laplace numerical inversion method and its application
Acta Petrolei Sinica 1995 ,16 (1 ):96 -104 (in Chinese))
[本文引用: 1]
[35]
谢伟平 , 王国波 , 于艳丽 . 移动载荷引起的土变形计算
岩土工程学报 , 2004 ,26 (3 ):318 -322
URL
[本文引用: 2]
讨论了移动荷载作用下地基土的变形问题 ,推导了不同荷载形式下地基土的变形计算公式 ,并以矩形荷载为例 ,比较了轨道、荷载自振频率、荷载移动速度、地基土模型等不同因素对地基土变形的影响。该方法可用于轨道系统引起的环境振动评价。
( Xie Weiping Wang Guobo Yu Yanli . Calculation of soil deformation induced by moving load
Chinese Journal of Geotechnical Engineering 2004 ,26 (3 ):318 -322 (in Chinese))
URL
[本文引用: 2]
讨论了移动荷载作用下地基土的变形问题 ,推导了不同荷载形式下地基土的变形计算公式 ,并以矩形荷载为例 ,比较了轨道、荷载自振频率、荷载移动速度、地基土模型等不同因素对地基土变形的影响。该方法可用于轨道系统引起的环境振动评价。
Propagation and attenuation characteristics of the vibration in soft soil foundations induced by high-speed trains
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
Quantification of ground-vibrations generated by high speed trains in ballasted railway tracks
2019
Efficient mitigation of high-speed trains induced vibrations of railway embankments using expanded polystyrene blocks
2020
考虑车下设备的城轨车辆弹性车体垂向振动特性研究
2019
考虑车下设备的城轨车辆弹性车体垂向振动特性研究
2019
城轨沿线地面环境振动响应的半解析有限元求解
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
城轨沿线地面环境振动响应的半解析有限元求解
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
Steady state responses of poroelastic half-space soil medium to a moving rectangular load
1
2007
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
地表移动载荷对既有地下隧洞动力影响解析研究
2018
地表移动载荷对既有地下隧洞动力影响解析研究
2018
非均匀饱和半空间的 Lamb 问题
1
2020
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
非均匀饱和半空间的 Lamb 问题
1
2020
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
Dynamic interaction of vehicles with trucks and roads
1
1987
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
速度与车辆动态特性对于车路相互作用的影响
1
1997
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
速度与车辆动态特性对于车路相互作用的影响
1
1997
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
移动的车辆随机载荷作用下梁桥的瞬态响应
1
1997
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
移动的车辆随机载荷作用下梁桥的瞬态响应
1
1997
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
移动车辆作用对公路连续梁桥地震反应特性的影响
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
移动车辆作用对公路连续梁桥地震反应特性的影响
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
Dynamic responses of a saturated poroelastic half-space generated by a moving truck on the uneven pavement
1
2015
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
Simulating the uncertain environmental impact of freight truck shifting programs
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
Numerical investigation of the mechanical response of semi-rigid base asphalt pavement under traffic load and nonlinear temperature gradient effect
1
2020
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
Dynamic responses of layered poroelastic ground under moving traffic loads considering effects of pavement roughness
2
2020
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
... 图 2 为不同车速时 $a$,$q_{\rm d}$,$f_{\rm d}$ 随时间的变化曲线 (计算中取 $m_{1} \!=2000$ kg, $m_{2}\! =50$ kg, $K_{1} =1.5 \times 10^{5 }$ N/m, $C_{1} =1.5 \times 10^{4 }$ N$\cdot$s/m; $r_{0} =0.5$ m; 后文均相同). 图中能够发现,当车速增大时这 3 个物理量的波动频率显著加快,但随着车速的增大 $a$,$q_{\rm d}$,$f_{\rm d}$ 的波动幅值没有单调性. 为此,图 3 给出了 3 个物理量波动幅值随车速的变化曲线,并引入地面不平度因子 $\beta = \bar {B}/ {L_0 }$,通过式 (1) 能够看出,$\beta $ 越大表征地面越不平顺. 分析图 3 (a) $\sim$ 图 3 (c) 可知,在低速时 ($c <5$ km/h),3 个物理量的波动幅值 $\bar {a}$,$\bar {q}_{\rm d} $,$\bar {f}_{\rm d} $ 迅速增大并达到峰值,之后随车速增大出现回落. 对于轮胎着地长度,其幅值 $\bar {a}$ 回落后逐渐收敛于稳定值. 而 $\bar {q}_{\rm d}$ 和 $\bar {f}_{\rm d}$ 在回落后发生反弹,$\bar {q}_{\rm d}$ 在车速较高时趋于稳定,而 $\bar {f}_{\rm d} $ 在较高车速时随车速单调递增. 图 3 还反映出,$\bar {a}$ 和 $\bar {q}_{\rm d} $ 的收敛值取决于地面不平度因子 $\beta $, $\beta $ 越大最终收敛值越大. 此外,图 3 (b) 中 $\bar {q}_{\rm d}$ 的曲线形态与文献[18 ] 给出的曲线形态一致,为本文模型提供了验证. ...
不平顺路面对交通载荷引起的地基振动影响
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
不平顺路面对交通载荷引起的地基振动影响
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
多柔体系统动力学建模与优化研究进展
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
多柔体系统动力学建模与优化研究进展
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
Tire roller contact model for simulation of vehicle vibration input
2
1993
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
... 式中,$\bar {B}$ 为路面不平度幅值;波数 $k_0 = \dfrac{2\pi }{L_0 }$,$L_0 $ 为波长. 根据文献[21 ,22 ] ,轮胎压缩量 $\Delta z_{\rm r}$ 表示为 ...
轮胎包容特性分析及其在汽车振动系统建模中的应用
1
1999
... 式中,$\bar {B}$ 为路面不平度幅值;波数 $k_0 = \dfrac{2\pi }{L_0 }$,$L_0 $ 为波长. 根据文献[21 ,22 ] ,轮胎压缩量 $\Delta z_{\rm r}$ 表示为 ...
轮胎包容特性分析及其在汽车振动系统建模中的应用
1
1999
... 式中,$\bar {B}$ 为路面不平度幅值;波数 $k_0 = \dfrac{2\pi }{L_0 }$,$L_0 $ 为波长. 根据文献[21 ,22 ] ,轮胎压缩量 $\Delta z_{\rm r}$ 表示为 ...
2
1991
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
... 地面不平度 $z_0 (t)$ 采用简谐波函数描述[24 ] ...
2
1991
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
... 地面不平度 $z_0 (t)$ 采用简谐波函数描述[24 ] ...
论力学系统的自由度
1
2018
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
论力学系统的自由度
1
2018
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
考虑充气压力效应的重载轮胎面内振动模态建模及参数辨识
1
2018
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
考虑充气压力效应的重载轮胎面内振动模态建模及参数辨识
1
2018
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
重载轮胎面内欧拉梁模型及耦合振动特性研究
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
重载轮胎面内欧拉梁模型及耦合振动特性研究
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
基于绝对节点坐标法的弹性线方法研究
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
基于绝对节点坐标法的弹性线方法研究
1
2019
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
城市道路交通诱发建筑结构振动的实测和数值模拟
1
2013
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
城市道路交通诱发建筑结构振动的实测和数值模拟
1
2013
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
车辆载荷引起地面振动的实测研究
2
2013
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
... 将 2.1 节的汽车模型代入地基模型,即可算出汽车行驶诱发的地基振动位移. 图 6 为计算出的 $t= 0.1$ s 时刻,地表竖向位移 $u_{z}$ 的空间分布,对比图 3 (a) 与图 3 (b) 的位移坐标值可以发现,车速增大时地表位移明显增大. 并且从图 3 (a) 中发现,振动位移沿纵向 ($x$ 方向,汽车行驶方向) 和横向 ($y$ 方向) 的分布存在差异. 为进一步考察该问题,图 7 绘出了振动位移分别沿 $x$, $y$ 方向的衰减曲线. 图中显示,在近场区域,沿纵向分布的振动位移明显大于横向,位移衰减距离也略大于横向. 通过对比图 8 (a) $\sim$ 图 8 (c) 还能发现,汽车行驶速度越低,则振动位移沿纵、横向分布的差异越大. 需补充的是,图 7 和图 8 给出的位移分布曲线与文献[30 ] 的实测曲线分布规律一致,进一步验证了本文模型的可靠. ...
车辆载荷引起地面振动的实测研究
2
2013
... 近些年出现的文献中,关于轨道列车引起地基振动响应研究已有很多[1 -6 ] ,而针对汽车载荷的地基振动响应研究却较少. 最早研究汽车载荷引起地基振动,是将汽车载荷简化为移动点源或面源载荷进行研究[7 -10 ] ,而这种简化是最理想的状态,没有考虑汽车悬架和轮胎的刚度、阻尼,以及地面状况对 车-地相互作用的动态影响. Fryba[11 ] 提出一种考虑汽车悬架和轮胎刚度、阻尼的两自由度 1/4 汽车模型,该模型在后续研究中得到了广泛应用并取得大量成果. 如:孙璐等[12 ] 利用两自由度 1/4 汽车模型分析了车-路动力相互作用;孙璐等[13 ] 、黄新艺等[14 ] 利用该模型分析了车-桥耦合振动响应;文献[15 ,16 ,17 ,18 ,19 ] 同样利用 1/4 车体模型对车-路面-地基系统的耦合振动响应做了研究. 但值得注意的是,该模型尽管考虑了汽车悬架和轮胎的刚度、阻尼,但并未考虑轮胎在汽车行驶过程中的动态变形,将轮-地接触假设为点接触或接触面积恒定不变的面接触,这样的假设无法反映轮胎包容性对车-地相互作用的影响,而且上述研究中都只考虑了车-地之间的竖向作用,并未考虑轮-地之间的纵向滚动摩擦. 孙加亮等[20 ] 对近年来多柔体系统的动力学建模、分析方法以及相关成果做了系统总结和综述,并提出关于柔性部件动力分析的问题. 郭孔辉等[21 -24 ] 在两自由度 1/4 汽车模型的基础上考虑轮胎几何滤波效应和弹性滤波效应,提出反映轮胎包容性的弹性滚子接触模型,并做了实验验证. 胡海岩[25 ] 通过研究振动系统在状态空间中的可达流形后发现,在计算非完整约束力学系统的自由度时,每一个非完整约束可以使得系统减少半个自由度. 刘志浩等[26 -27 ] 建立轮胎欧拉梁模型进一步分析了轮胎包容性对振动特性的影响. 范纪华等[28 ] 基于绝对节点坐标的弹性线方法对履带式车辆的动力学问题做了仿真分析. 此外,也有学者采用现场实测的方法研究了汽车行驶诱发地面振动的特性,如叶茂等[29 ] 、贾宝印等[30 ] . 但由于问题本身的复杂性且影响因素较多,实测方法未能得出有效的振动预测模型. ...
... 将 2.1 节的汽车模型代入地基模型,即可算出汽车行驶诱发的地基振动位移. 图 6 为计算出的 $t= 0.1$ s 时刻,地表竖向位移 $u_{z}$ 的空间分布,对比图 3 (a) 与图 3 (b) 的位移坐标值可以发现,车速增大时地表位移明显增大. 并且从图 3 (a) 中发现,振动位移沿纵向 ($x$ 方向,汽车行驶方向) 和横向 ($y$ 方向) 的分布存在差异. 为进一步考察该问题,图 7 绘出了振动位移分别沿 $x$, $y$ 方向的衰减曲线. 图中显示,在近场区域,沿纵向分布的振动位移明显大于横向,位移衰减距离也略大于横向. 通过对比图 8 (a) $\sim$ 图 8 (c) 还能发现,汽车行驶速度越低,则振动位移沿纵、横向分布的差异越大. 需补充的是,图 7 和图 8 给出的位移分布曲线与文献[30 ] 的实测曲线分布规律一致,进一步验证了本文模型的可靠. ...
2
2006
... 基于上述分析,本文在两自由度 1/4 汽车模型的基础上结合郭孔辉[31 ] 提出的弹性滚子接触模型,建立汽车与地基系统的耦合振动模型,并同时考虑车-地之间的竖向和纵向作用,利用 Fourier 和 Laplace 积分变换推导出地表振动位移的解析解. 经过数值计算,系统分析了车速、地面不平度和轮胎包容性对地表振动的影响规律. ...
... 式中,$\bar {\Delta }z_{\rm r} $ 为轮胎平均压缩量,$\bar {\Delta }z_{\rm r} ( t ) = \int_{ - r_0 }^{r_0 } {\dfrac{\Delta z_{\rm r} }{2r_0 }d x_1 } $;$\dot {\bar {\Delta }}z_{\rm r} $ 表示对时间 $t$ 的一阶导数. $\mu _{\rm r} $为轮胎滚动摩擦系数[31 ] ,$\mu _{\rm r} = \mu _0 + 3.24\mu _{\rm s} \left( {\dfrac{c}{100}} \right)^2$,$\mu _0 $,$\mu _{\rm s} $ 为地面材质相关的基本参数,可查表获得. 根据几何关系,得出轮胎着地长度 $a(t)$ 的表达式为 ...
2
2006
... 基于上述分析,本文在两自由度 1/4 汽车模型的基础上结合郭孔辉[31 ] 提出的弹性滚子接触模型,建立汽车与地基系统的耦合振动模型,并同时考虑车-地之间的竖向和纵向作用,利用 Fourier 和 Laplace 积分变换推导出地表振动位移的解析解. 经过数值计算,系统分析了车速、地面不平度和轮胎包容性对地表振动的影响规律. ...
... 式中,$\bar {\Delta }z_{\rm r} $ 为轮胎平均压缩量,$\bar {\Delta }z_{\rm r} ( t ) = \int_{ - r_0 }^{r_0 } {\dfrac{\Delta z_{\rm r} }{2r_0 }d x_1 } $;$\dot {\bar {\Delta }}z_{\rm r} $ 表示对时间 $t$ 的一阶导数. $\mu _{\rm r} $为轮胎滚动摩擦系数[31 ] ,$\mu _{\rm r} = \mu _0 + 3.24\mu _{\rm s} \left( {\dfrac{c}{100}} \right)^2$,$\mu _0 $,$\mu _{\rm s} $ 为地面材质相关的基本参数,可查表获得. 根据几何关系,得出轮胎着地长度 $a(t)$ 的表达式为 ...
轮胎动刚度和阻尼特性的研究
1
1994
... 实验研究发现,轮胎充气压力增大,轮胎刚度增大而阻尼减小. 为综合反映轮胎包容性的影响,利用实验拟合公式将轮胎刚度系数 $K_{\rm w}$ 和阻尼系数 $C_{\rm w}$ 统一用轮胎充气压力表示[32 -33 ] ...
轮胎动刚度和阻尼特性的研究
1
1994
... 实验研究发现,轮胎充气压力增大,轮胎刚度增大而阻尼减小. 为综合反映轮胎包容性的影响,利用实验拟合公式将轮胎刚度系数 $K_{\rm w}$ 和阻尼系数 $C_{\rm w}$ 统一用轮胎充气压力表示[32 -33 ] ...
农用轮胎径向刚度和阻尼系数试验研究
1
2011
... 实验研究发现,轮胎充气压力增大,轮胎刚度增大而阻尼减小. 为综合反映轮胎包容性的影响,利用实验拟合公式将轮胎刚度系数 $K_{\rm w}$ 和阻尼系数 $C_{\rm w}$ 统一用轮胎充气压力表示[32 -33 ] ...
农用轮胎径向刚度和阻尼系数试验研究
1
2011
... 实验研究发现,轮胎充气压力增大,轮胎刚度增大而阻尼减小. 为综合反映轮胎包容性的影响,利用实验拟合公式将轮胎刚度系数 $K_{\rm w}$ 和阻尼系数 $C_{\rm w}$ 统一用轮胎充气压力表示[32 -33 ] ...
精确的拉普拉斯数值反演方法及其应用
1
1995
... 根据前文推导出的公式,编写程序计算地表振动位移,其中 Fourier 逆变换采用离散傅里叶逆变换 (IDFT) 实现,Laplace 逆变换采用 Crump 法[34 ] 做数值反演. 为了进行对比,地基参数取值与文献[35 ] 相同,杨氏模量 $E=2.69\times 10^8$ Pa,密度 $\rho=1550$ kg/m$^3$,泊松比 $\nu=0.257$,$P$ 波波速 $v_P = \sqrt {\left( {\lambda + 2G} \right) / \rho }=459$ m/s,$S$ 波波速 $v_S = \sqrt {G / \rho } =263$ m/s. 通过观察 式 (3)、式 (5)、式 (12) 能够发现,若取地面不平度幅值 $\tilde B=0$,则 $q_{\rm d}$, $a$ 都变为定值,再取轮胎滚动阻力系数 $\mu_{\rm r}= 0$,则 $f_{\rm d} =0$,本文模型即可退化为弹性半空间表面作用移动矩形载荷的地基动力响应问题,退化模型与文献[35 ] 相同. 图 5 为观测点 $A(350,0,0)$ 处的竖向位移,图中显示本文结果与文献解能够很好的吻合. 图 5 还反映出,当同时考虑竖向和纵向作用力时,地表振动位移明显增大. ...
精确的拉普拉斯数值反演方法及其应用
1
1995
... 根据前文推导出的公式,编写程序计算地表振动位移,其中 Fourier 逆变换采用离散傅里叶逆变换 (IDFT) 实现,Laplace 逆变换采用 Crump 法[34 ] 做数值反演. 为了进行对比,地基参数取值与文献[35 ] 相同,杨氏模量 $E=2.69\times 10^8$ Pa,密度 $\rho=1550$ kg/m$^3$,泊松比 $\nu=0.257$,$P$ 波波速 $v_P = \sqrt {\left( {\lambda + 2G} \right) / \rho }=459$ m/s,$S$ 波波速 $v_S = \sqrt {G / \rho } =263$ m/s. 通过观察 式 (3)、式 (5)、式 (12) 能够发现,若取地面不平度幅值 $\tilde B=0$,则 $q_{\rm d}$, $a$ 都变为定值,再取轮胎滚动阻力系数 $\mu_{\rm r}= 0$,则 $f_{\rm d} =0$,本文模型即可退化为弹性半空间表面作用移动矩形载荷的地基动力响应问题,退化模型与文献[35 ] 相同. 图 5 为观测点 $A(350,0,0)$ 处的竖向位移,图中显示本文结果与文献解能够很好的吻合. 图 5 还反映出,当同时考虑竖向和纵向作用力时,地表振动位移明显增大. ...
移动载荷引起的土变形计算
2
2004
... 根据前文推导出的公式,编写程序计算地表振动位移,其中 Fourier 逆变换采用离散傅里叶逆变换 (IDFT) 实现,Laplace 逆变换采用 Crump 法[34 ] 做数值反演. 为了进行对比,地基参数取值与文献[35 ] 相同,杨氏模量 $E=2.69\times 10^8$ Pa,密度 $\rho=1550$ kg/m$^3$,泊松比 $\nu=0.257$,$P$ 波波速 $v_P = \sqrt {\left( {\lambda + 2G} \right) / \rho }=459$ m/s,$S$ 波波速 $v_S = \sqrt {G / \rho } =263$ m/s. 通过观察 式 (3)、式 (5)、式 (12) 能够发现,若取地面不平度幅值 $\tilde B=0$,则 $q_{\rm d}$, $a$ 都变为定值,再取轮胎滚动阻力系数 $\mu_{\rm r}= 0$,则 $f_{\rm d} =0$,本文模型即可退化为弹性半空间表面作用移动矩形载荷的地基动力响应问题,退化模型与文献[35 ] 相同. 图 5 为观测点 $A(350,0,0)$ 处的竖向位移,图中显示本文结果与文献解能够很好的吻合. 图 5 还反映出,当同时考虑竖向和纵向作用力时,地表振动位移明显增大. ...
... [35 ] 相同. 图 5 为观测点 $A(350,0,0)$ 处的竖向位移,图中显示本文结果与文献解能够很好的吻合. 图 5 还反映出,当同时考虑竖向和纵向作用力时,地表振动位移明显增大. ...
移动载荷引起的土变形计算
2
2004
... 根据前文推导出的公式,编写程序计算地表振动位移,其中 Fourier 逆变换采用离散傅里叶逆变换 (IDFT) 实现,Laplace 逆变换采用 Crump 法[34 ] 做数值反演. 为了进行对比,地基参数取值与文献[35 ] 相同,杨氏模量 $E=2.69\times 10^8$ Pa,密度 $\rho=1550$ kg/m$^3$,泊松比 $\nu=0.257$,$P$ 波波速 $v_P = \sqrt {\left( {\lambda + 2G} \right) / \rho }=459$ m/s,$S$ 波波速 $v_S = \sqrt {G / \rho } =263$ m/s. 通过观察 式 (3)、式 (5)、式 (12) 能够发现,若取地面不平度幅值 $\tilde B=0$,则 $q_{\rm d}$, $a$ 都变为定值,再取轮胎滚动阻力系数 $\mu_{\rm r}= 0$,则 $f_{\rm d} =0$,本文模型即可退化为弹性半空间表面作用移动矩形载荷的地基动力响应问题,退化模型与文献[35 ] 相同. 图 5 为观测点 $A(350,0,0)$ 处的竖向位移,图中显示本文结果与文献解能够很好的吻合. 图 5 还反映出,当同时考虑竖向和纵向作用力时,地表振动位移明显增大. ...
... [35 ] 相同. 图 5 为观测点 $A(350,0,0)$ 处的竖向位移,图中显示本文结果与文献解能够很好的吻合. 图 5 还反映出,当同时考虑竖向和纵向作用力时,地表振动位移明显增大. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}