引言
非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径.
本文研究了航天器在大气层中飞行的情况, 航天器在大气层外飞行的情况将在后续的工作中讨论.
1 非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理
非保守非线性两类变量刚-弹-液-控耦合分析动力学的Hamilton型拟变分原理为
(1) $\delta {\varPi }_{\rm reqc} -\delta Q_{req} =0$
$\varPi _{\rm reqc} =\int_{t_0 }^{t_1 }\bigg\{\pi _{\rm c} -M_{\rm F} \cdot \phi +M_{\rm c} \cdot \theta +F_{\rm c} \cdot X^{\rm r}+ \pi _{\rm r} +\\ \qquad\iiint_{V^{\rm e}} \rho ^{\rm e}(v^{\rm r}+\omega \times x^{\rm e})\cdot v^{\rm e}{\rm d}V+\pi_{\rm e} +\\ \qquad\iiint_{V^{\rm q}} \rho^{\rm q}(v^{\rm r}+\omega \times x^{\rm q})\cdot v^{\rm q}{\rm d}V+\pi _{\rm q} +\\ \qquad\iint_{S_{\rm eq}}{(T^{\rm eq}\cdot u^{\rm e}+T^{\rm qe}\cdot u^{\rm q})}{\rm d}S\bigg\}{\rm d}t $
$\pi _{\rm c} =\dfrac{1}{2}\omega _{\rm c} \cdot J_{\rm D} \cdot \omega _{\rm c} +K_{\rm m} I_{\rm D} \cdot \phi $
$\pi _{\rm r} =\iiint_{V^{\rm e}} \dfrac{1}{2}\rho ^{\rm e}v^{\rm r}\cdot v^{\rm r}{\rm d}V+\iiint_{V^{\rm q}} \dfrac{1}{2}\rho^{\rm q}v^{\rm r}\cdot v^{\rm r}{\rm d}V +\\ \qquad\dfrac{1}{2} \omega \cdot J\cdot \omega +(F+F_{\rm N} )\cdot X^{\rm r}+(M+M_{\rm N} )\cdot \theta $
$ \pi_{\rm e} =\iiint_{V^{\rm e}}\bigg[\dfrac{1}{2}\rho^{\rm e}v^{\rm e}\cdot v^{\rm e}-A(E)+(f^{\rm e}+f_{\rm N}^{\rm e})\cdot u^{\rm e}\bigg]{\rm d}V +\\ \qquad \iint_{S_\sigma }(T^{\rm e}+T_{\rm N}^{\rm e})\cdot u^{\rm e}{\rm d}S $
$ \pi _{\rm q} =\iiint_{V^{\rm q}} \bigg[\dfrac{1}{2}\rho ^{\rm q}v^{\rm q}\cdot v^{\rm q}+pI:\nabla u^{\rm q}-\mu (\nabla v^{\rm q}+v^{\rm q}\nabla ):\\ \qquad\nabla u^{\rm q}+(f^{\rm q}+f_{\rm N}^{\rm q})\cdot u^{\rm q}\bigg]{\rm d}V+\iint_{S_{\rm f} }(T^{\rm q}+T_{\rm N}^{\rm q})\cdot u^{\rm q}{\rm d}S $
$ \delta Q_{req} =\int_{t_0}^{t_1}(X^{\rm r}\cdot \delta F_{\rm N} + \theta \cdot \delta M_{\rm N} ){\rm d}t+\\ \qquad\int_{t_0}^{t_1}\lt(\iiint_{V^{\rm e}} u^{\rm e}\cdot \delta f_{\rm N}^{\rm e} {\rm d}V){\rm d}t +\\ \qquad \int_{t_0}^{t_1}\lt(\iint_{S_\sigma} u^{\rm e}\cdot \delta T_{\rm N}^{\rm e} {\rm d}S){\rm d}t+\\ \qquad\int_{t_0}^{t_1}\lt(\iiint_{V^{\rm q}} u^{\rm q}\cdot \delta f_{\rm N}^{\rm q} {\rm d}V){\rm d}t +\\ \qquad\int_{t_0}^{t_1}\lt(\iint_{S_{\rm f}} u^{\rm q}\cdot \delta T_{\rm N}^{\rm q} {\rm d}S){\rm d}t-\\ \qquad\int_{t_0}^{t_1}\bigg[\iiint_{V^{\rm q}} \nabla u^{\rm q}:\delta \mu (\nabla \dot{{u}}^{\rm q}+\dot{{u}}^{\rm q}\nabla )){\rm d}V\bigg]{\rm d}t$
(2) $ \left.\begin{array}{l} v^{\rm r}-\dfrac{{\rm d}X^{\rm r}}{{\rm d}t}={\bf0},\ \ \omega -\dfrac{{\rm d} \theta }{{\rm d}t}={\bf0}\\ E-\dfrac{1}{2}(\nabla u^{\rm e}+u^{\rm e}\nabla +\nabla u^{\rm e}\cdot u^{\rm e}\nabla )={\bf0}\\ v^{\rm e}-\dfrac{{\rm d}u^{\rm e}}{{\rm d}t}={\bf0},\ \ v^{\rm q}-\dfrac{{\rm d}u^{\rm q}}{{\rm d}t}={\bf0},\ \ \omega _{\rm c} -\dfrac{{\rm d}\phi}{{\rm d}t}={\bf0} \\ u^{\rm e}-\bar{u}^{\rm e}={\bf0},\ \ {\rm on}\ S_{\rm u} \\ u^{\rm q}-\bar{u}^{\rm q}={\bf0},\ \ {\rm on}\ S_{\rm w}\\ \end{array}\right\} $
式中, $X^{\rm r}$为系统质心的矢径, $x$为系统中任意一点到质心的矢径, $ \theta$为系统刚化后的转角, $J$为系统刚化后的转动惯量(假设$J$为常量), $F$为保守力主矢, $F_{\rm N}$为非保守力主矢, $M$为保守力主矩, $M_{\rm N}$为非保守力主矩, $\rho^{\rm q}$为流体质量密度, $\rho^{\rm e}$为弹性体质量密度, $f^{\rm e}$为弹性体的保守体积力, $f_{\rm N}^{\rm e} $为弹性体的非保守体积力, $f^{\rm q}$为流体的保守体积力, $f_{\rm N}^{\rm q}$为流体的非保守体积力, $\mu$为黏性系数, $I$为单位张量, $p$为压强, $T^{\rm e}$为弹性体的保守面积力, $T_{\rm N}^{\rm e} $为弹性体的非保守面积力, $v^{\rm r}$为刚体平动的速度, $v^{\rm e}$为弹性体质点的速度, $u^{\rm e}$为弹性体质点的位移, $T^{\rm q}$为流体的保守面积力, $T_{\rm N}^{\rm q}$为流体的非保守面积力, $v^{\rm q}$为流体质点的速度, $u^{\rm q}$为流体质点的位移, $\nabla$为梯度算子, $V^{\rm r}$为刚体体积, $V^{\rm q}$流体体积, $S_{\rm w}$为流体的位移边界面, $S_{\rm f}$为流体的应力边界面, $S_{\rm u}$为弹性体的位移边界面, $S_\sigma$为弹性体的应力边界面, $S_{\rm eq} $为弹-液交界面, $T^{\rm qe}$为$S_{\rm eq}$处的液体面积力, $T^{\rm eq}$为$S_{\rm eq} $处的弹性体面积力, $K_{\rm m}$为电动机转矩系数, $J_{\rm D}$为电动机转子转动惯量, $M_{\rm F}$为实现所需的舵面偏角导致的电动机负载转矩, $ \omega_{\rm c}$为电动机转子转动角速度, 并且$\omega _{\rm c} ={\rm d}\phi /{\rm d}t$, $\phi$为电动机转子的转角, $M_{\rm c}$为舵面偏转引起的力矩的增量, $F_{\rm c}$为舵面偏转引起的力的增量.
注意到$\delta \varPi_{\rm reqc}$为刚-弹-液-控耦合动力学两类变量的拟变分原理的定积分形式泛函的变分; $\pi_{\rm c}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0}^{t_1}\pi _{\rm c} {\rm d}t$形式上与电动机动力学的Hamilton变分原理的泛函相同, 认为是保守系统); $\pi_{\rm r}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm r} {\rm d}t}$形式上与刚体动力学的Hamilton型拟变分原理的泛函相同); $\pi_{\rm e}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm e} {\rm d}t}$形式上与弹性动力学的Hamilton型拟变分原理的泛函相同); $\pi_{\rm q}$为$\varPi_{\rm reqc}$的另一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm q} {\rm d}t}$形式上与流体力学的Hamilton型拟变分原理的泛函相同). 明显可见,刚-弹-液-控耦合系统两类变量的Hamilton型拟变分原理的定积分形式泛函$\varPi_{\rm reqc}$不是电动机动力学的Hamilton变分原理的泛函$\int_{t_0}^{t_1 } {\pi _{\rm c}{\rm d}t}$、刚体动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm r} {\rm d}t}$、弹性动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm e} {\rm d}t}$和流体动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm q} {\rm d}t}$的组合, 而是多出控-刚耦合项$-M_{\rm F}\cdot\phi+M_{\rm c}\cdot \theta+F_{\rm c}\cdot X^{\rm r}$、刚-弹耦合项$\int_{t_0}^{t_1}\iiint_{V^{\rm e}}(v^{\rm c}+ \omega\times x^{\rm e})\cdot v^{\rm e}{\rm d}V{\rm d}t$、刚-液耦合项$\int_{t_0}^{t_1}\iiint_{V^{\rm q}}(v^{\rm c}+ \omega\times x^{\rm q})\cdot v^{\rm q}{\rm d}V{\rm d}t$和弹-液耦合项$\iint_{S_{\rm eq}}(T^{\rm eq}\cdot u^{\rm e}+T^{\rm qe}\cdot u^{\rm q}){\rm d}S$. 明显可见, 刚-弹-液-控耦合中的刚-弹耦合和刚-液耦合是惯性耦合, 而弹-液耦合和控-刚耦合是接触耦合. 这里说明, 对于弹-液耦合, 在弹-液交界面$S_{\rm eq} $处, 内力满足平衡关系[43 -44 ]
(3) $T^{\rm eq}+T^{\rm qe}={\bf0},\ \ {\rm on}\ S_{\rm eq}$
(4) $u^{\rm e}-u^{\rm q}={\bf0},\ \ {\rm on}\ S_{\rm eq}$
(5) $T=\iiint_{V^{\rm e}} \dfrac{1}{2}\rho ^{\rm e}v^{\rm r}\cdot v^{\rm r}{\rm d}V+\iiint_{V^{\rm q}} \dfrac{1}{2}\rho ^{\rm q}v^{\rm r}\cdot v^{\rm r}{\rm d}V +\\ \qquad\dfrac{1}{2} \omega \cdot J\cdot \omega +\dfrac{1}{2}\omega _{\rm c} \cdot J_{\rm D} \cdot \omega _{\rm c} +\\ \qquad\iiint_{V^{\rm e}} \bigg[\dfrac{1}{2}\rho ^{\rm e}v^{\rm e}\cdot v^{\rm e}+\rho ^{\rm e}(v^{\rm r}+\omega\times x^{\rm e})\cdot v^{\rm e}\bigg]{\rm d}V +\\ \qquad\iiint_{V^{\rm q}} \bigg[\dfrac{1}{2}\rho ^{\rm q}v^{\rm q}\cdot v^{\rm q}+\rho ^{\rm q}(v^{\rm r}+ \omega\times x^{\rm q})\cdot v^{\rm q}\bigg]{\rm d}V $
(6) $ U=-(K_{\rm m} I_{\rm D} -M_{\rm F} )\cdot \phi -F_{\rm c} \cdot X^{\rm r}-M_{\rm c} \cdot \theta -F\cdot X^{\rm r} -\\ \qquad M\cdot \theta -\iint_{S_{\rm eq}}(T^{\rm eq}\cdot u^{\rm e}+T^{\rm qe}\cdot u^{\rm q}){\rm d}S+\\ \qquad \iiint_{V^{\rm e}}[A(E)-f^{\rm e}\cdot u^{\rm e}]{\rm d}V- \iint_{S_\sigma } T^{\rm e}\cdot u^{\rm e}{\rm d}S+\\ \qquad \iiint_{V^{\rm q}}(-pI:\nabla u^{\rm q}-f^{\rm q}\cdot u^{\rm q}){\rm d}V-\\ \qquad\iint_{S_{\rm f}} T^{\rm q}\cdot u^{\rm q}{\rm d}S $
(7) $ U_{\rm qs} =-F_{\rm N} \cdot X^{\rm r}-M_{\rm N} \cdot \theta -\iiint_{V^{\rm e}} f_{\rm N}^{\rm e}\cdot u^{\rm e}{\rm d}V-\\ \qquad \iint_{S_\sigma} T_{\rm N}^{\rm e} \cdot u^{\rm e}{\rm d}S-\iiint_{V^{\rm q}} f_{\rm N}^{\rm q} \cdot u^{\rm q}{\rm d}V-\\ \qquad\iint_{S_{\rm f}} T_{\rm N}^{\rm q} \cdot u^{\rm q}{\rm d}S+ \iiint_{V^{\rm q}} \mu (\nabla v^{\rm q}+v^{\rm q}\nabla ):\nabla u^{\rm q}{\rm d}V $
2 刚-弹-液-控耦合系统的Lagrange方程
根据式(5)$\sim\!$式(7), 式(1)可改写为
(8) $ \delta{\varPi}_{\rm reqc} -\delta Q_{req} =\\ \qquad\delta \int_{t_0 }^{t_1 }(T-U){\rm d}t-\int_{t_0 }^{t_1 } {\delta U_{\rm qs} } {\rm d}t-\delta Q_{req} =\\ \qquad\int_{t_0 }^{t_1 } \lt( \dfrac{\partial T}{\partial \omega _{\rm c} }\cdot \delta \omega _{\rm c} -\dfrac{\partial U}{\partial \phi }\cdot \delta \phi ){\rm d}t+\\ \qquad\int_{t_0 }^{t_1 } \bigg( \dfrac{\partial T}{\partial v^{\rm r}}\cdot \delta v^{\rm r} -\dfrac{\partial U}{\partial X^{\rm r}}\cdot \delta X^{\rm r}\bigg){\rm d}t+\\ \qquad\int_{t_0 }^{t_1 } \lt( \dfrac{\partial T}{\partial \omega }\cdot \delta \omega -\dfrac{\partial U}{\partial \theta }\cdot \delta \theta ){\rm d}t +\\ \qquad\int_{t_0 }^{t_1 } \lt( \dfrac{\partial T}{\partial v^{\rm e}}\cdot \delta v^{\rm e}-\dfrac{\partial U}{\partial u^{\rm e}}\cdot \delta u^{\rm e}){\rm d}t +\\ \qquad\int_{t_0 }^{t_1 } \lt( \dfrac{\partial T}{\partial v^{\rm q}}\cdot \delta v^{\rm q}-\dfrac{\partial U}{\partial u^{\rm q}}\cdot \delta u^{\rm q}){\rm d}t -\\ \qquad\int_{t_0 }^{t_1 } {\delta U_{{\rm qs}} } {\rm d}t-\delta Q_{req} =0 $
(9) $ \left.\begin{array}{l} \delta v^{\rm r}-\delta \dfrac{{\rm d}X^{\rm r}}{{\rm d}t}={\bf0},\ \ \delta \omega -\delta \dfrac{{\rm d} \theta }{{\rm d}t}={\bf0}\\ \delta E-\delta \dfrac{1}{2}(\nabla u^{\rm e}+u^{\rm e}\nabla +\nabla u^{\rm e}\cdot u^{\rm e}\nabla )={\bf0}\\ \delta v^{\rm e}-\delta \dfrac{{\rm d}u^{\rm e}}{{\rm d}t}=0,\ \ \delta v^{\rm q}-\delta \dfrac{{\rm d}u^{\rm q}}{{\rm d}t}={\bf0}\\ \delta \omega _{\rm c} -\delta \dfrac{{\rm d}\phi}{{\rm d}t}={\bf0}\\ \delta u^{\rm e}={\bf0},\ \ {\rm on}\ S_{\rm u} \\ \delta u^{\rm q}={\bf0},\ \ {\rm on}\ S_{\rm w} \\ \end{array}\right\} $
将先决条件的变分式(9)代入式(8), 进行分步积分, 可得
(10) $ \left.\begin{array}{l} \int_{t_0}^{t_1} \dfrac{\partial T}{\partial \omega _{\rm c} }\cdot \delta \dot{{\phi }}{\rm d}t =\lt(\dfrac{\partial T}{\partial \omega _{\rm c} }\cdot \delta \phi )\bigg|_{t_0 }^{t_1 } - \int_{t_0 }^{t_1 } {\dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \omega _{\rm c} }\cdot \delta \phi {\rm d}t}\\ \int_{t_0 }^{t_1}{\dfrac{\partial T}{\partial v^{\rm r}}\cdot \delta \dot{{X}}^{\rm r}{\rm d}t} =\lt(\dfrac{\partial T}{\partial v^{\rm r}}\cdot \delta X^{\rm r}) \bigg|_{t_0 }^{t_1 } -\int_{t_0 }^{t_1} {\dfrac{\rm d}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm r}}\cdot \delta X^{\rm r}{\rm d}t}\\ \int_{t_0 }^{t_1 } {\dfrac{\partial T}{\partial \omega }\cdot \delta \dot{{\theta }}{\rm d}t} =\lt(\dfrac{\partial T}{\partial\omega }\cdot \delta \theta ) \bigg|_{t_0 }^{t_1 } -\int_{t_0 }^{t_1 } {\dfrac{\rm d}{{\rm d}t}\dfrac{\partial T}{\partial \omega }\cdot \delta \theta {\rm d}t}\\ \int_{t_0 }^{t_1 } {\dfrac{\partial T}{\partial v^{\rm e}}\cdot \delta \dot{{u}}^{\rm e}{\rm d}t} ={\lt(\dfrac{\partial T}{\partial v^{\rm e}}\cdot \delta u^{\rm e})} \bigg|_{t_0 }^{t_1 } -\int_{t_0 }^{t_1 } {\dfrac{\rm d}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm e}}\cdot \delta u^{\rm e}{\rm d}t}\\ \int_{t_0 }^{t_1} \dfrac{\partial T}{\partial v^{\rm q}}\cdot \delta \dot{{u}}^{\rm q}{\rm d}t =\lt(\dfrac{\partial T}{\partial v^{\rm q}}\cdot \delta u^{\rm q})\bigg|_{t_0 }^{t_1} -\int_{t_0 }^{t_1 } {\dfrac{\rm d}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm q}}\cdot \delta u^{\rm q}{\rm d}t} \end{array}\right\} $
将式(10)代入式(8), 在时域边界$t=t_0$和$t=t_1$处取$\delta u^{\rm e}=0$, $\delta u^{\rm q}=0$, $\delta X^{\rm r}=0$, $\delta \theta={\bf0}$, $\delta \phi={\bf0}$,则可得
(11) $ \delta {\varPi }_{\rm reqc} -\delta Q_{req} =\\ \qquad \int_{t_0 }^{t_1 } \lt( -\dfrac{\rm d}{{\rm d}t}\dfrac{\partial T}{\partial \omega _{\rm c}}\cdot \delta \phi -\dfrac{\partial U}{\partial \phi }\cdot \delta \phi ){\rm d}t +\\ \qquad \int_{t_0 }^{t_1 } \lt( -\dfrac{\rm d}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm r}}\cdot \delta X^{\rm r}-\dfrac{\partial U}{\partial X^{\rm r}}\cdot \delta X^{\rm r}){\rm d}t +\\ \qquad \int_{t_0 }^{t_1 } \lt( -\dfrac{\rm d}{{\rm d}t}\dfrac{\partial T}{\partial \omega }\cdot \delta \theta -\dfrac{\partial U}{\partial \theta }\cdot \delta \theta ){\rm d}t +\\ \qquad \int_{t_0 }^{t_1 } \lt( -\dfrac{\rm d}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm e}}\cdot \delta u^{\rm e}-\dfrac{\partial U}{\partial u^{\rm e}}\cdot \delta u^{\rm e}){\rm d}t +\\ \qquad \int_{t_0 }^{t_1 } \lt( -\dfrac{\rm d}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm q}}\cdot \delta u^{\rm q}-\dfrac{\partial U}{\partial u^{\rm q}}\cdot \delta u^{\rm q}){\rm d}t -\\ \qquad \int_{t_0 }^{t_1 } {\delta U_{\rm qs} } {\rm d}t-\delta Q_{req} =0 $
(12) $ \int_{t_0 }^{t_1 } - \delta U_{\rm qs} {\rm d}t-\delta Q_{req} =\\ \qquad \int_{t_0 }^{t_1 } \bigg[ F_{\rm N} \cdot \delta X^{\rm r}+M_{\rm N} \cdot \delta \theta +\iiint_{V^{\rm e}} {f_{\rm N}^{\rm e} \cdot \delta u^{\rm e}{\rm d}V} +\\ \qquad \iint_{S_\sigma } {T_{\rm N}^{\rm e} \cdot \delta u^{\rm e}{\rm d}S}+\iiint_{V^{\rm q}} {f_{\rm N}^{\rm q} \cdot \delta u^{\rm q}{\rm d}V}+\\ \qquad \iint_{S_{\rm f} } {T_{\rm N}^{\rm q} \cdot \delta u^{\rm q}{\rm d}S} -\\ \qquad \iiint_{V^{\rm q}} {\mu (\nabla \dot{{u}}^{\rm q}+\dot{{u}}^{\rm q}\nabla ):\delta \nabla u^{\rm q}}{\rm d}V\bigg]{\rm d}t $
应用Green定理, 并考虑到先决条件(9)中的流体位移边界条件, 可得
(13) $ -\iiint_{V^{\rm q}} {\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\delta \nabla u^{\rm q}}{\rm d}V =\\ \qquad -\iint_{S_{\rm f} } {\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )n^{\rm q}\delta u^{\rm q}{\rm d}S} -\\ \qquad \iint_{S_{\rm eq} } {\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )n^{\rm q}\delta u^{\rm q}{\rm d}S} +\\ \qquad \iiint_{V^{\rm q}} {\nabla \mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\delta u^{\rm q}{\rm d}V} $
(14) $ \delta {\varPi }_{\rm reqc} -\delta Q_{req} =\delta \int_{t_0 }^{t_1 } \lt( T-U-U_{\rm qs} ){\rm d}t-\delta Q_{req} =\\ \qquad \int_{t_0 }^{t_1 } -\lt( \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \omega _{\rm c} }+\dfrac{\partial U}{\partial \phi }) \cdot \delta \phi {\rm d}t+\int_{t_0 }^{t_1 } -\\ \qquad\lt( \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm r}}+\dfrac{\partial U}{\partial X^{\rm r}}-F_{\rm N} ) \cdot \delta X^{\rm r}{\rm d}t + \int_{t_0 }^{t_1 } -\\ \qquad\lt( \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial\omega }+\dfrac{\partial U}{\partial \theta }-M_{\rm N} ) \cdot \delta \theta {\rm d}t+\int_{t_0 }^{t_1 } -\\ \qquad\Bigg\{ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm e}}+\dfrac{\partial U}{\partial u^{\rm e}}-\iiint_{V^{\rm e}} {f_{\rm N}^{\rm e} {\rm d}V} - \\ \qquad\iint_{S_\sigma } {T_{\rm N}^{\rm e} }{\rm d}S\Bigg\}\cdot \delta u^{\rm e}{\rm d}t+\int_{t_0 }^{t_1 } -\\ \qquad\Bigg\{ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm q}}+\dfrac{\partial U}{\partial u^{\rm q}}-\iiint_{V^{\rm q}} [f_{\rm N}^{\rm q} +\\ \qquad\nabla \cdot \mu \lt(\nabla v^{\rm q}+v^{\rm q}\nabla )]{\rm d}V -\\ \qquad \iint_{S_{\rm f} } {[T_{\rm N}^{\rm q} -\mu \lt(\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}]}{\rm d}S+\\ \qquad\iint_{S_{\rm eq} } {[\mu \lt(\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}]}{\rm d}S\Bigg\}\cdot \delta u^{\rm q}{\rm d}t =0 $
由于$\delta u^{\rm e}$, $\delta u^{\rm q}$, $\delta X^{\rm r}$, $\delta \theta $, $\delta \phi$的任意性, 故由上式可得两类变量的刚-弹-液-控耦合系统的Lagrange方程组
(15) $ \left.\begin{array}{l} \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \omega _{\rm c} }+\dfrac{\partial U}{\partial \phi }={\bf0}\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm r}}+\dfrac{\partial U}{\partial X^{\rm r}}-F_{\rm N} ={\bf0}\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial\omega }+\dfrac{\partial U}{\partial \theta }-M_{\rm N} ={\bf0}\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm e}}+\dfrac{\partial U}{\partial u^{\rm e}}-\iiint_{V^{\rm e}} {f_{\rm N}^{\rm e} {\rm d}V}-\iint_{S_\sigma } {T_{\rm N}^{\rm e} {\rm d}S}={\bf0} \\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm q}}+\dfrac{\partial U}{\partial u^{\rm q}}-\\ \qquad\iiint_{V^{\rm q}} {[f_{\rm N}^{\rm q} +\nabla \cdot \mu (\nabla v^{\rm q}+v^{\rm q}\nabla )]{\rm d}V} -\\ \qquad\iint_{S_{\rm f} } {[T_{\rm N}^{\rm q} -\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}]}{\rm d}S+\\ \qquad \iint_{S_{\rm eq} } {[\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}]}{\rm d}S={\bf0}\\ \end{array}\right\} $
3 应用Lagrange方程建立刚-弹-液-控耦合系统的控制方程
应用刚-弹-液-控耦合系统Lagrange方程推导其控制方程. 为此, 需要推导计算Lagrange方程中的有关动能和有关势能的各项. 首先, 推导计算Lagrange方程中的有关动能的各项
(16) $ \left.\begin{array}{l} \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \omega _{\rm c} }=J_{\rm D} \cdot \dfrac{{\rm d} \omega _{\rm c} }{{\rm d}t}\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm e}}=\iiint_{V^{\rm e}} \rho ^{\rm e}\Bigg[\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}+\dfrac{{\rm d} \omega }{{\rm d}t}\times x^{\rm e}+ \omega \times \lt( \omega \times x^{\rm e})+\dfrac{{\rm d}v^{\rm e}}{{\rm d}t}\Bigg]{\rm d}V\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm q}}=\iiint_{V^{\rm q}} \rho ^{\rm q}\Bigg[\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}+\dfrac{{\rm d} \omega }{{\rm d}t}\times x^{\rm q}+\omega \times \lt( \omega \times x^{\rm q})+\dfrac{{\rm d}v^{\rm q}}{{\rm d}t}\Bigg]{\rm d}V\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \omega }=-\iiint_{V^{^{\rm e}}} \rho ^{\rm e}\dfrac{\rm d}{{\rm d}t}\lt(v^{\rm e}\times x^{\rm e}){\rm d}V-\iiint_{V^{\rm q}} {\rho ^{\rm q}\dfrac{\rm d}{{\rm d}t}\lt(v^{\rm q}\times x^{\rm q}){\rm d}V}+J\cdot \dfrac{{\rm d} \omega }{{\rm d}t}\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial v^{\rm r}}=\iiint_{V^{\rm e}} {\rho ^{\rm e}\lt(\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}+\dfrac{{\rm d}v^{\rm e}}{{\rm d}t})}{\rm d}V+ \iiint_{V^{\rm q}} {\rho ^{\rm q}\lt(\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}+\dfrac{{\rm d}v^{\rm q}}{{\rm d}t})}{\rm d}V \end{array}\right\} $
然后, 推导计算Lagrange方程中的有关势能的各项为
(17) $ \left.\begin{array}{l} \dfrac{\partial U}{\partial \phi }=\dfrac{\partial }{\partial \phi }\lt[-\lt(K_{\rm m} I_{\rm D} -M_{\rm F} )\cdot \phi ]=-(K_{\rm m} I_{\rm D} -M_{\rm F} )\\ \dfrac{\partial U}{\partial X^{\rm r}}=\dfrac{\partial }{\partial X^{\rm r}}\lt(-F\cdot X^{\rm r}-F_{\rm c} \cdot X^{\rm r})=-F-F_{\rm c}\\ \dfrac{\partial U}{\partial \theta }=\dfrac{\partial }{\partial \theta }\lt(-M\cdot \theta -M_{\rm c} \cdot \theta )=-M-M_{\rm c} \\ \dfrac{\partial U}{\partial u^{\rm e}}=\dfrac{\partial }{\partial u^{\rm e}}\Bigg[\iiint_{V^{\rm e}} \lt[A(E)-f^{\rm e}\cdot u^{\rm e}]{\rm d}V - \iint_{S_\sigma } {T^{\rm e}\cdot u^{\rm e}}{\rm d}S-\iint_{S_{\rm eq} } T^{\rm eq}\cdot u^{\rm e}{\rm d}S\Bigg]\\ \dfrac{\partial U}{\partial u^{\rm q}}=\dfrac{\partial }{\partial u^{\rm q}}\Bigg[\iiint_{V^{\rm q}} {\lt(-pI:\nabla u^{\rm q}-f^{\rm q}\cdot u^{\rm q}){\rm d}V} - \iint_{S_{\rm f} } {T^{\rm q}\cdot u^{\rm q}{\rm d}S}-\iint_{S_{\rm eq} } {T^{\rm qe}\cdot u^{\rm q}}{\rm d}S\Bigg] \end{array}\right\}\quad $
应用Green定理, 并考虑到先决条件(9)中的弹性位移边界条件, 可得
(18) $ \iiint_{V^{\rm e}} {\dfrac{\partial }{\partial u^{\rm e}}A(E)}{\rm d}V =\iint_{S_\sigma } {(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}{\rm d}S}+\\ \qquad \iint_{S_{\rm eq} } {(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}{\rm d}S} -\\ \qquad \iiint_{V^{\rm e}} {\lt[(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot \nabla ]{\rm d}V} $
(19) $ \dfrac{\partial }{\partial u^{\rm e}}\Bigg[\iiint_{V^{\rm e}} \lt[A(E)-f^{\rm e}\cdot u^{\rm e}]{\rm d}V-\\ \qquad \iint_{S_\sigma } {T^{\rm e}\cdot u^{\rm e}}{\rm d}S-\iint_{S_{\rm eq} } T^{\rm eq}\cdot u^{\rm e}{\rm d}S\Bigg] =\\ \qquad -\iiint_{V^{\rm e}} \Bigg[(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot \nabla +f^{\rm e}\Bigg]{\rm d}V +\\ \qquad \iint_{S_\sigma} \Bigg[\lt(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}-T^{\rm e}\Bigg]{\rm d}S +\\ \qquad \iint_{S_{\rm eq} } \Bigg[\lt(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}-T^{\rm eq}\Bigg]{\rm d}S $
应用Green定理, 并考虑到边界条件(9)中的流体位移边界条件, 可得
(20) $ \left. \begin{array}{l}\dfrac{\partial}{\partial u^{\rm q}}\iiint_{V^{\rm q}} (-pI:\nabla u^{\rm q}){\rm d}V =\iint_{S_{\rm f} } -pI\cdot n^{\rm q}{\rm d}S+ \\ \qquad \iint_{S_{\rm eq}}-pI\cdot n^{\rm q}{\rm d}S-\iiint_{V^{\rm q}} (-pI\cdot \nabla ){\rm d}V\\ \dfrac{\partial U}{\partial u^{\rm q}}=\dfrac{\partial }{\partial u^{\rm q}}\Bigg[\iiint_{V^{\rm q}} (-pI:\nabla u^{\rm q}-f^{\rm q}\cdot u^{\rm q}){\rm d}V- \\ \iint_{S_{\rm f}} T^{\rm q}\cdot u^{\rm q}{\rm d}S-\iint_{S_{\rm eq}}T^{\rm qe}\cdot u^{\rm q}{\rm d}S\Bigg] =\\ \qquad -\iiint_{V^{\rm q}} (-pI\cdot \nabla +f^{\rm q}){\rm d}V+ \\ \qquad\iint_{S_{\rm f}}(-pI\cdot n^{\rm q}-T^{\rm q}){\rm d}S +\\ \qquad \iint_{S_{\rm eq}} (-pI\cdot n^{\rm q}-T^{\rm qe}){\rm d}S \end{array}\right\} $
将式(16)$\sim\!$式(20)代入Lagrange方程(15)中, 可得
(21) $J_{\rm D} \cdot \dfrac{{\rm d}\omega _{\rm c} }{{\rm d}t}-K_{\rm m} I_{\rm D} +M_{\rm F} ={\bf0}$
(22) $\iiint_{V^{\rm e}} \rho ^{\rm e}\lt(\dfrac{{\rm d}v^{\rm e}}{{\rm d}t}+\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}){\rm d}V+\iiint_{V^{\rm q}} \rho^{\rm q}\lt(\dfrac{{\rm d}v^{\rm q}}{{\rm d}t}+\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}){\rm d}V- F-F_{\rm c} -F_{\rm N} =0$
(23) $ -\iiint_{V^{\rm e}} \rho ^{\rm e}\dfrac{\rm d}{{\rm d}t}(v^{\rm e}\times x^{\rm e}){\rm d}V- \iiint_{V^{\rm q}} \rho^{\rm q}\dfrac{\rm d}{{\rm d}t}(v^{\rm q}\times x^{\rm q}){\rm d}V + J\cdot \dfrac{{\rm d} \omega }{{\rm d}t}-M-M_{\rm c} -M_{\rm N} ={\bf0}$
(24) $ \iiint_{V^{\rm e}} \rho^{\rm e}\lt[\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}+\dfrac{{\rm d} \omega }{{\rm d}t}\times x^{\rm e}+\omega \times (\omega \times x^{\rm e})+\dfrac{{\rm d}v^{\rm e}}{{\rm d}t}]{\rm d}V -\\ \quad \iiint_{V^{\rm e}} \lt[(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot \nabla +f^{\rm e}+f_{\rm N}^{\rm e} ]{\rm d}V+\\ \quad \iint_{S_\sigma} \lt[(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}-T^{\rm e}-T_{\rm N}^{\rm e} ]{\rm d}S+ \\ \quad \iint_{S_{\rm eq}} \lt[(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}-T^{\rm eq}]{\rm d}S={\bf0}$
(25) $ \iiint_{V^{\rm q}} \rho^{\rm q}\lt[\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}+\dfrac{{\rm d} \omega }{{\rm d}t}\times x^{\rm q}+\omega \times (\omega \times x^{\rm q})+\dfrac{{\rm d}v^{\rm q}}{{\rm d}t}]{\rm d}V - \\ \quad \iiint_{V^{\rm q}} \lt[-\nabla \cdot pI+\nabla \cdot \mu (\nabla v^{\rm q}+v^{\rm q}\nabla )+f^{\rm q}+f_{\rm N}^{\rm q} ]{\rm d}V +\\ \quad \iint_{S_{\rm f} } \lt[-pI\cdot n^{\rm q}+\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}-T^{\rm q}-T_{\rm N}^{\rm q} ]{\rm d}S + \\ \quad \iint_{S_{\rm eq} } \lt[-pI\cdot n^{\rm q}+\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}-T^{\rm qe}]{\rm d}S={\bf0}$
应用可变函数选值的理论, 进而推导出两类变量的非保守非线性刚-弹-液-控耦合动力学的控制方程
(26) $J_{\rm D} \cdot \dfrac{{\rm d}\omega _{\rm c} }{{\rm d}t}-K_{\rm m} I_{\rm D} +M_{\rm F} ={\bf0}$
(27) $ \iiint_{V^{\rm e}} \rho ^{\rm e}\lt(\dfrac{{\rm d}v^{\rm e}}{{\rm d}t}+\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}){\rm d}V+\iiint_{V^{\rm q}} \rho ^{\rm q}\lt(\dfrac{{\rm d}v^{\rm q}}{{\rm d}t}+\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}){\rm d}V -\\ \qquad F-F_{\rm c} -F_{\rm N} ={\bf0}$
(28) $-\iiint_{V^{\rm e}} {\rho ^{\rm e}\dfrac{\rm d}{{\rm d}t}(v^{\rm e}\times x^{\rm e}){\rm d}V}-\iiint_{V^{\rm q}} {\rho ^{\rm q}\dfrac{\rm d}{{\rm d}t}(v^{\rm q}\times x^{\rm q}){\rm d}V} +\\ \qquad J\cdot \dfrac{{\rm d}\omega }{{\rm d}t}-M-M_{\rm c} -M_{\rm N} ={\bf0}$
(29) $\rho ^{\rm e}\lt[\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}+\dfrac{{\rm d}\omega }{{\rm d}t}\times x^{\rm e}+\omega \times (\omega \times x^{\rm e})+\dfrac{{\rm d}v^{\rm e}}{{\rm d}t}] -\\ \qquad (I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot \nabla -f^{\rm e}-f_{\rm N}^{\rm e} ={\bf0},\ \ {\rm in}\ V$
(30) $(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}-T^{\rm e}-T_{\rm N}^{\rm e} ={\bf0},\ \ {\rm on}\ S_\sigma$
(31) $(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}-T^{\rm eq}={\bf0},\ \ {\rm on}\ S_{\rm eq}$
(32) $ \rho ^{\rm q}\lt[\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}+\dfrac{{\rm d}\omega }{{\rm d}t}\times x^{\rm q}+\omega \times (\omega \times x^{\rm q})+\dfrac{{\rm d}v^{\rm q}}{{\rm d}t}] + \nabla \cdot pI-\\ \qquad\nabla \cdot \mu (\nabla v^{\rm q}+v^{\rm q}\nabla )- f^{\rm q}-f_{\rm N}^{\rm q} ={\bf0},\ \ {\rm in}\ V$
(33) $-pI\cdot n^{\rm q}+\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}- T^{\rm q}-T_{\rm N}^{\rm q} ={\bf0},\ \ {\rm on}\ S_{\rm f}$
(34) $-pI\cdot n^{\rm q}+\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}-T^{\rm qe}={\bf0},\ \ {\rm on}\ S_{\rm f}$
(35) $ (I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}-pI\cdot n^{\rm q} +\\ \qquad\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}=0,\ \ {\rm on}\ S_{\rm eq}$
建议注意: 在无际边界面$S_{\rm eq} $处
(36) $n^{\rm e}+n^{\rm q}={\bf0},\ \ {\rm on}\ S_{\rm eq}$
两类变量的非保守非线性刚-弹-液-控耦合分析动力学的控制方程(26)$\sim$(34)改写为
(37) $J_{\rm D} \cdot \dfrac{{\rm d}\omega _{\rm c} }{{\rm d}t}-K_{\rm m} I_{\rm D} +M_{\rm F} ={\bf0}$
(38) $\iiint_{V^{\rm e}} \rho ^{\rm e}\lt(\dfrac{{\rm d}v^{\rm e}}{{\rm d}t}+\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}){\rm d}V+\iiint_{V^{\rm q}} \rho ^{\rm q}\lt(\dfrac{{\rm d}v^{\rm q}}{{\rm d}t}+\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}){\rm d}V -\\ \qquad F-F_{\rm c} -F_{\rm N} ={\bf0}$
(39) $ -\iiint_{V^{\rm e}} {\rho ^{\rm e}\dfrac{\rm d}{{\rm d}t}(v^{\rm e}\times x^{\rm e}){\rm d}V}-\iiint_{V^{\rm q}} {\rho^{\rm q}\dfrac{\rm d}{{\rm d}t}(v^{\rm q}\times x^{\rm q}){\rm d}V} +\\ \qquad J\cdot \dfrac{{\rm d} \omega }{{\rm d}t}-M-M_{\rm c} -M_{\rm N} ={\bf0}$
(40) $\rho ^{\rm e}\lt[\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}+\dfrac{{\rm d}\omega }{{\rm d}t}\times x^{\rm e}+\omega \times (\omega \times x^{\rm e})+\dfrac{{\rm d}v^{\rm e}}{{\rm d}t}] -\\ \qquad (I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot \nabla -f^{\rm e}-f_{\rm N}^{\rm e} ={\bf0},\ \ {\rm in}\ V$
(41) $(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}-T^{\rm e}-T_{\rm N}^{\rm e} ={\bf0},\ \ {\rm on}\ S_\sigma$
(42) $\rho^{\rm q}\lt[\dfrac{{\rm d}v^{\rm r}}{{\rm d}t}+\dfrac{{\rm d} \omega }{{\rm d}t}\times x^{\rm q}+\omega \times (\omega \times x^{\rm q})+\dfrac{{\rm d}v^{\rm q}}{{\rm d}t}] +\\ \qquad \nabla \cdot pI-\nabla \cdot \mu (\nabla v^{\rm q}+v^{\rm q}\nabla )-\\ \qquad f^{\rm q}-f_{\rm N}^{\rm q} ={\bf0},\ \ {\rm in}\ V$
(43) $-pI\cdot n^{\rm q}+\mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}- T^{\rm q}-T_{_{\rm N} }^{\rm q} ={\bf0},\ \ {\rm on}\ S_{\rm f}$
(44) $ (I+u^{\rm e}\nabla )\cdot \dfrac{\partial A(E)}{\partial E}\cdot n^{\rm e}-pI\cdot n^{\rm q} + \mu (\nabla v^{\rm q}+v^{\rm q}\nabla )\cdot n^{\rm q}={\bf0},\ \ {\rm on}\ S_{\rm eq}$
(45) $ \left.\begin{array}{l} v^{\rm r}-\dfrac{{\rm d}X^{\rm r}}{{\rm d}t}={\bf0},\ \ \omega -\dfrac{{\rm d}\theta }{{\rm d}t}={\bf0}\\ E-\dfrac{1}{2}(\nabla u^{\rm e}+u^{\rm e}\nabla +\nabla u^{\rm e}\cdot u^{\rm e}\nabla )={\bf0}\\ v^{\rm e}-\dfrac{{\rm d}u^{\rm e}}{{\rm d}t}={\bf0},\ \ v^{\rm q}-\dfrac{{\rm d}u^{\rm q}}{{\rm d}t}={\bf0},\ \ \omega _{\rm c} -\dfrac{{\rm d}\phi}{{\rm d}t}={\bf0}\\ u^{\rm e}-\bar{u}^{\rm e}={\bf0},\ \ {\rm on}\ S_{\rm u}\\ u^{\rm q}-\bar{u}^{\rm q}={\bf0},\ \ {\rm on}\ S_{\rm w}\\ \end{array}\right\}$
还有一个重要的先决条件: 在无际边界面$S_{\rm eq}$处
(46) $u^{\rm e}-u^{\rm q}={\bf0},\ \ {\rm on}\ S_{\rm eq}$
退化到一类变量的非保守非线性刚-弹-液-控耦合分析动力学问题, 则其控制方程为
(47) $J_{\rm D} \cdot \dfrac{{\rm d}^2\phi }{{\rm d}t^2}-K_{\rm m} I_{\rm D} +M_{\rm F} ={\bf0}$
(48) $\iiint_{V^{\rm e}} \rho ^{\rm e}\lt(\dfrac{{\rm d}^2u^{\rm e}}{{\rm d}t^2}+\dfrac{{\rm d}^2X^{\rm r}}{{\rm d}t^2}){\rm d}V+\\ \qquad\iiint_{V^{\rm q}} \rho^{\rm q}\lt(\dfrac{{\rm d}^2u^{\rm q}}{{\rm d}t^2}+\dfrac{{\rm d}^2X^{\rm r}}{{\rm d}t^2}){\rm d}V -\\ \qquad F-F_{\rm c} -F_{\rm N} ={\bf0}$
(49) $-\iiint_{V^{\rm e}} \rho ^{\rm e}\dfrac{\rm d}{{\rm d}t}\lt(\dfrac{{\rm d}u^{\rm e}}{{\rm d}t}\times x^{\rm e}){\rm d}V-\\ \qquad\iiint_{V^{\rm q}} \rho ^{\rm q}\dfrac{\rm d}{{\rm d}t}\lt(\dfrac{du^{\rm q}}{{\rm d}t}\times x^{\rm q}){\rm d}V +\\ \qquad J\cdot \dfrac{{\rm d}^2\theta}{{\rm d}t^2}-M-M_{\rm c} -M_{\rm N} ={\bf0}$
(50) $ \rho ^{\rm e}\lt[\dfrac{{\rm d}^2X^{\rm r}}{{\rm d}t^2}+\dfrac{{\rm d}^2\theta }{{\rm d}t^2}\times x^{\rm e}+\dfrac{{\rm d} \theta }{{\rm d}t}\times \lt(\dfrac{{\rm d} \theta }{{\rm d}t}\times x^{\rm e})+\dfrac{{\rm d}^2u^{\rm e}}{{\rm d}t^2}] -\\ \qquad (I+u^{\rm e}\nabla)\cdot \dfrac{\partial A\lt(\dfrac{1}{2}\nabla u^{\rm e}+\dfrac{1}{2}u^{\rm e}\nabla +\dfrac{1}{2}\nabla u^{\rm e}\cdot u^{\rm e}\nabla )}{\partial \lt(\dfrac{1}{2}\nabla u^{\rm e}+\dfrac{1}{2}u^{\rm e}\nabla +\dfrac{1}{2}\nabla u^{\rm e}\cdot u^{\rm e}\nabla )}\cdot \nabla -\\ \qquad f^{\rm e}-f_{\rm N}^{\rm e} ={\bf0},\ \ {\rm in}\ V$
(51) $(I+u^{\rm e}\nabla )\cdot \dfrac{\partial A\lt(\dfrac{1}{2}\nabla u^{\rm e}+\dfrac{1}{2}u^{\rm e}\nabla +\dfrac{1}{2}\nabla u^{\rm e}\cdot u^{\rm e}\nabla )}{\partial \lt(\dfrac{1}{2}\nabla u^{\rm e}+\dfrac{1}{2}u^{\rm e}\nabla +\dfrac{1}{2}\nabla u^{\rm e}\cdot u^{\rm e}\nabla )}\cdot n^{\rm e} -\\ \qquad T^{\rm e}-T_{\rm N}^{\rm e} ={\bf0},\ \ {\rm on}\ S_{\sigma}$
(52) $ \rho^{\rm q}\lt[\dfrac{{\rm d}^2X^{\rm r}}{{\rm d}t^2}+\dfrac{{\rm d}^2 \theta }{{\rm d}t^2}\times x^{\rm q}+\dfrac{{\rm d} \theta }{{\rm d}t}\times \lt(\dfrac{{\rm d} \theta }{{\rm d}t}\times x^{\rm q})+\dfrac{{\rm d}^2u^{\rm q}}{{\rm d}t^2}]+\\ \qquad \nabla \cdot pI-\nabla \cdot \mu \lt(\nabla \dfrac{{\rm d}u^{\rm q}}{{\rm d}t}+\dfrac{{\rm d}u^{\rm q}}{{\rm d}t}\nabla )-\\ \qquad f^{\rm q}-f_{\rm N}^{\rm q} ={\bf0},\ \ {\rm in}\ V$
(53) $ -pI\cdot n^{\rm q}+\mu \lt(\nabla \dfrac{{\rm d}u^{\rm q}}{{\rm d}t}+\dfrac{{\rm d}u^{\rm q}}{{\rm d}t}\nabla )\cdot n^{\rm q} - T^{\rm q}-T_{\rm N}^{\rm q} ={\bf0},\ \ {\rm on}\ S_{\rm f}$
(54) $ (I+u^{\rm e}\nabla )\cdot \dfrac{\partial A\lt(\dfrac{1}{2}\nabla u^{\rm e}+\dfrac{1}{2}u^{\rm e}\nabla +\dfrac{1}{2}\nabla u^{\rm e}\cdot u^{\rm e}\nabla )}{\partial \lt(\dfrac{1}{2}\nabla u^{\rm e}+\dfrac{1}{2}u^{\rm e}\nabla +\dfrac{1}{2}\nabla u^{\rm e}\cdot u^{\rm e}\nabla )}\cdot\\ \qquad n^{\rm e} - pI\cdot n^{\rm q}+\mu \lt(\nabla \dfrac{{\rm d}u^{\rm q}}{{\rm d}t}+\dfrac{{\rm d}u^{\rm q}}{{\rm d}t}\nabla )\cdot n^{\rm q}={\bf0}\\ \qquad {\rm on}\ S_{\rm eq}$
(55) $u^{\rm e}-u^{\rm q}={\bf0}, \ \ {\rm on}\ S_{\rm eq}$
(56) $\left.\begin{array}{l} u^{\rm e}-\bar{u}^{\rm e}={\bf0}, \ \ {\rm on}\ S_{\rm u}\\ u^{\rm q}-\bar{u}^{\rm q}={\bf0}, \ \ {\rm on}\ S_{\rm w} \end{array}\right\}$
这里借助非保守非线性刚-弹-液-控耦合分析动力学的控制方程(47)$\sim$(56)来说明刚-弹-液-控耦合的耦合机理.
刚体动力学的轨迹方程式(48)中的$\iiint_{V^{\rm e}}\rho^{\rm e}$ $({\rm d}^2u^{\rm e})/({\rm d}t^2){\rm d}V$项和弹性动力学的动力学方程式(50)中的$\rho^{\rm e}\{({\rm d}^2X^{\rm r})/({\rm d}t^2)+({\rm d}^2\theta)/({\rm d}t^2)\times x^{\rm e}+({\rm d}\theta)/({\rm d}t)\times[({\rm d}\theta)/({\rm d}t)\times x^{\rm e}]\}$项说明刚-弹耦合是惯性耦合. 同样, 刚体动力学的姿态方程式(49)中的$\iiint_{V^{\rm e}}\rho^{\rm e}$ $({\rm d}/{{\rm d}t})$ $[({\rm d}u^{\rm e})/({\rm d}t)\times x^{\rm e}]{\rm d}V$项和弹性动力学的动力学方程式(50)中的$\rho^{\rm e}\{({\rm d}^2X^{\rm r})/({\rm d}t^2)+({\rm d}^2\theta)/({\rm d}t^2)\times x^{\rm e}+({\rm d}\theta)/({\rm d}t)\times[({\rm d}\theta)/({\rm d}t)\times x^{\rm e}]\}$项说明刚-弹耦合是惯性耦合. 刚体动力学的轨迹方程式(48)中的$\iiint_{V^{\rm q}}\rho^{\rm q}$ $({\rm d}^2u^{\rm q})/({\rm d}t^2){\rm d}V$项和流体动力学的动力学方程式(52)中的$\rho^{\rm q}\{({\rm d}^2X^{\rm r})/({\rm d}t^2)+({\rm d}^2\theta)/({\rm d}t^2)\times x^{\rm q}+({\rm d}\theta)/({\rm d}t)\times[({\rm d}\theta)/({\rm d}t)\times x^{\rm q}]\}$项说明刚-液耦合是惯性耦合. 同样, 刚体动力学的姿态方程式(49)中的$\iiint_{V^{\rm q}}\rho^{\rm q}({\rm d}/{\rm d}t)[({\rm d}u^{\rm q})/({\rm d}t)\times x^{\rm q}]{\rm d}V$项和流体动力学的动力学方程式(52)中的$\rho^{\rm q}\{({\rm d}^2X^{\rm r})/({\rm d}t^2)+({\rm d}^2\theta)/({\rm d}t^2)\times x^{\rm q}+({\rm d}\theta)/({\rm d}t)\times[({\rm d}\theta)/({\rm d}t)\times x^{\rm q}]\}$项说明刚-液耦合是惯性耦合.
弹-液交界面处力的平衡方程(54)和位移协调方程(55)说明弹-液耦合是接触耦合.
刚体动力学的轨迹方程式(48)中的$F_{\rm c}$项和控制动力学的方程式(47)中的$M_{\rm F}$项说明控-刚耦合是接触耦合. 同样, 刚体动力学的姿态方程式(49)中的$M_{\rm c}$项和控制动力学的方程(47)中的$M_{\rm F}$项也说明控-刚耦合是接触耦合.
这里存在一个问题, 即似乎看不出控制对弹和液的影响. 其实不然, 控制是通过方程(48)和(49)影响刚体的$X^{\rm r}$和$ \theta$, 进而影响弹和液的. 反之, 弹和液是通过方程(48)和(49)中的惯性耦合项影响刚体的$X^{\rm r}$和$ \theta$, 而控制中的$\phi$是按照对航天器$X^{\rm r}$和$ \theta$变化规律的要求设计的.
4 刚-弹-液-控耦合系统Lagrange方程的应用研究
4.1 应用非保守非线性刚-弹-液-控耦合系统Lagrange方程建立位移协调元模型
这里说明, 为了书写简捷紧凑, 前面的理论推导部分采用实体张量符号; 为了编写计算程序的方便, 后面的有限元法研究, 采用指标张量符号书写. 将弹性连续体划分为$n$个单元, 取$u_i^{(a)}$为自变函数, 将液体连续体划分为$m$个单元, 取$u_i^{(c)} $为自变函数, 它们满足如下条件:
(1)在元素中$u_i^{(a)} $满足$C^0$连续, $u_i^{(c)} $满足$C^0$连续;
(2)在$S_{ab} $上, $u_i^{(a)} =u_i^{(b)} $;
(3)在$S_{cd} $上, $u_i^{(c)} =u_i^{(d)} $;
(4)在$S_{\rm w} $上, $u_i^{(c)} -\bar{{u}}_i^{(c)} =0$;
(5)在$S_{\rm u} $上, $u_i^{(a)} -\bar{{u}}_i^{(a)} =0$;
(6)在$ S_{\rm eq} $中的$ S_{ac} $上, $u_i^{(a)} -u_i^{(c)} =0$;
或者在$ S_{\rm eq} $中的$ S_{bd} $上, $u_i^{(b)} -u_i^{(d)} =0$.
这里说明, 由于弹-液耦合产生在弹-液交界面处, 为了方便起见, 在划分有限元法的元素的时候,
总是希望把弹-液交界面处理为有限元法中的无际边界面. 这就是条件(6)的来源. 弹性体单元、液体单元和弹-液交界面处单元如图1 所示.
图1
图1
刚-弹-液-控耦合体的有限元素和界面关系
Fig. 1
The relationship between the element and the interface in finite element method of rigid-elastic-liquid-control coupiing
(57) $ \left.\begin{array}{l} \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \dot{{\phi }}_i }+\dfrac{\partial U}{\partial \phi _i }=0\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \dot{{X}}_i^{\rm r} }+\dfrac{\partial U}{\partial X_i^{\rm r} }-F_i^{\rm N}=0\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \dot{{\theta }}_i }+\dfrac{\partial U}{\partial \theta _i }-M_i^{\rm N}=0\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \dot{{u}}_i^{(a)} }+\dfrac{\partial U}{\partial u_i^{(a)} }-\iiint_{V^{e(a)}} {f_i^{(a){\rm N}} {\rm d}V}-\iint_{S_\sigma ^{(a)} } {T_i^{(a){\rm N}} {\rm d}S}=0\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \dot{{u}}_i^{(c)} }+\dfrac{\partial U}{\partial u_i^{(c)} }-\\ \qquad\iiint_{V^{q(c)}} {\lt[f_i^{(c){\rm N}} +\mu \lt(\dot{{u}}_{i,j}^{(c)} +\dot{{u}}_{j,i}^{(c)} )_{,j} ]{\rm d}V} -\\ \qquad\iint_{S_{\rm f}^{(c)} } \lt[T_i^{(c){\rm N}} -\mu \lt(\dot{{u}}_{i,j}^{(c)} +\dot{{u}}_{j,i}^{(c)} )n_j^{(c)} ]{\rm d}S+\\ \qquad\iint_{S_{\rm eq} } {\lt[\mu \lt(\dot{{u}}_{i,j}^{(c)} +\dot{{u}}_{j,i}^{(c)})n_j^{(c)} ]}{\rm d}S=0 \end{array} \right\} $
$ T=\iiint_{V^{\rm e}} \dfrac{1}{2}\rho ^{\rm e}\dot{{X}}_i^{\rm r} \dot{{X}}_i^{\rm r} {\rm d}V+\\ \qquad\iiint_{V^{\rm q}} \dfrac{1}{2}\rho ^{\rm q}\dot{{X}}_i^{\rm r} \dot{{X}}_i^{\rm r} {\rm d}V+\dfrac{1}{2}J_{ij} \dot{{\theta }}_i \dot{{\theta }}_j +\dfrac{1}{2}J_{ij}^{\rm D} \dot{{\phi }}_i \dot{{\phi }}_j +\\ \qquad\iiint_{V^{e(a)}} \sum_{a=1}^n \Bigg[\dfrac{1}{2}\rho ^{\rm e}\dot{{u}}_i^{(a)} \dot{{u}}_i^{(a)} +\rho ^{\rm e} \lt(\dot{{X}}_i^{\rm r} +e_{ijk} \dot{{\theta }}_j x_k^{(a)} )\dot{{u}}_i^{(a)} \Bigg]{\rm d}V +\\ \qquad\iiint_{V^{q(c)}} \sum_{c=1}^m \Bigg[\dfrac{1}{2}\rho ^{\rm q}\dot{{u}}_i^{(c)} \dot{{u}}_i^{(c)} +\rho ^{\rm q} \lt(\dot{{X}}_i^{\rm r} +e_{ijk} \dot{{\theta }}_j x_k^{(c)})\dot{{u}}_i^{(c)}\Bigg]{\rm d}V \\ U=-\lt(K_i^m I^{\rm D}-M_i^{\rm F} )\phi _i -F_i^{\rm c} X_i^{\rm r} -M_i^{\rm c} \theta _i -F_i X_i^{\rm r} -M_i \theta _i -\\ \qquad\iint_{S_{\rm eq}} \lt(T_i^{\rm eq} u_i^{(a)} +T_i^{\rm qe} u_i^{(c)} ){\rm d}S+\\ \qquad\sum_{a=1}^n \Bigg\{\iiint_{V^{{\rm e}(a)}} \Bigg[A\lt(\dfrac{1}{2}u_{j,k}^{(a)} +\dfrac{1}{2}u_{k,j}^{(a)} +\dfrac{1}{2}u_{i,j}^{(a)} u_{i,k}^{(a)}) -\\ \qquad f_i^{(a)} u_i^{(a)} \Bigg]{\rm d}V-\iint_{S_\sigma ^{(a)} } {T_i^{(a)} u_i^{(a)} {\rm d}S}\Bigg\} +\\ \qquad \sum_{c=1}^m \Bigg\{\iiint_{V^{{\rm q}(c)}} {\lt(-p\delta _{ij} u_{i,j}^{(c)} -f_i^{(c)} u_i^{(c)} ){\rm d}V} -\\ \qquad\iint_{S_{\rm f}^{(c)} } T_i^{(c)} u_i^{(c)} {\rm d}S\Bigg\} $
(58) $ \left.\begin{array}{l} u_i^{(a)} -u_i^{(b)} =0, \ \ {\rm on}\ S_{ab}\\ u_i^{(c)} -u_i^{(d)} =0, \ \ {\rm on}\ S_{cd}\\ u_i^{(a)} -\bar{{u}}_i^{(a)} =0, \ \ {\rm on}\ S_{\rm u}\\ u_i^{(c)} -\bar{{u}}_i^{(c)} =0, \ \ {\rm on}\ S_{\rm w}\\ u_i^{(a)} -u_i^{(c)} =0\ \ \text{或}\ \ u_i^{(b)} -u_i^{(d)} =0, \ \ {\rm on}\ S_{\rm eq} \end{array} \right\} $
这便是适于有限元计算的非保守非线性刚-弹-液-控耦合系统的Lagrange方程, 它提供了有限元计算的位移协调元模型.
4.2 应用非保守非线性刚-弹-液-控耦合系统Lagrange方程建立位移杂交元模型
应用Lagrange乘子法, 将式(58)代入势能的表达式中, 则有
(59) $ U_{\rm m} =U+\sum_{a=1}^n \Bigg[\iint_{S_{ab} } {\lt(u_i^{(a)} -u_i^{(b)} )\mu _i {\rm d}S} +\\ \qquad\iint_{S_{\rm u} } \lt(u_i^{(a)} -\bar{{u}}_i^{(a)} )\kappa _i {\rm d}S\Bigg] +\\ \qquad\sum_{c=1}^m \Bigg[\iint_{S_{cd} } \lt(u_i^{(c)} -u_i^{(d)} )\lambda _i {\rm d}S +\\ \qquad\iint_{S_{\rm w} } \lt(u_i^{(c)} -\bar{{u}}_i^{(c)} )\eta _i {\rm d}S\Bigg] $
(60a) $ \left.\begin{array}{l} \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \dot{{\phi }}_i}+\dfrac{\partial U}{\partial \phi _i }=0\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \dot{{X}}_i^{\rm r}}+\dfrac{\partial U}{\partial X_i^{\rm r} }-F_i^{\rm N} =0\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \dot{{\theta }}_i}+\dfrac{\partial U}{\partial \theta _i }-M_i^{\rm N} =0 \end{array} \right\} $
(60b) $ \left.\begin{array}{l} \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \dot{{u}}_i^{(a)} }+\dfrac{\partial U_{\rm m} }{\partial u_i^{(a)} }-\iiint_{V^{e(a)}} {f_i^{(a){\rm N}} {\rm d}V}-\iint_{S_\sigma ^{(a)} } {T_i^{(a){\rm N}}{\rm d}S}=0\\ \dfrac{{\rm d}}{{\rm d}t}\dfrac{\partial T}{\partial \dot{{u}}_i^{(c)} }+\dfrac{\partial U_{\rm m} }{\partial u_i^{(c)} }-\\ \qquad\iiint_{V^{q(c)}} {\lt[f_i^{(c){\rm N}} +\mu \lt(\dot{{u}}_{i,j}^{(c)} +\dot{{u}}_{j,i}^{(c)} )_{,j}]{\rm d}V}-\\ \qquad \iint_{S_{\rm f}^{(c)} } {\lt[T_i^{(c){\rm N}} -\mu \lt(\dot{{u}}_{i,j}^{(c)} +\dot{{u}}_{j,i}^{(c)} )n_j^{(c)} ]{\rm d}S} +\\ \qquad\iint_{S_{\rm eq} } {\lt[\mu \lt(\dot{{u}}_{i,j}^{(c)} +\dot{{u}}_{j,i}^{(c)} )n_j^{(c)} ]}{\rm d}S=0 \end{array} \right\} $
经过一系列的运算, 解得Lagrange乘子的表达式
(61) $\mu _i^{(a)} =-\lt(\delta _{ij} +u_{i,j}^{(a)} )\cdot\\ \qquad\dfrac{\partial A\lt(\dfrac{1}{2}u_{j,k}^{(a)} +\dfrac{1}{2}u_{k,j}^{(a)} +\dfrac{1}{2}u_{i,j}^{(a)} u_{i,k}^{(a)} )}{\partial \lt(\dfrac{1}{2}u_{j,k}^{(a)} +\dfrac{1}{2}u_{k,j}^{(a)} +\dfrac{1}{2}u_{i,j}^{(a)} u_{i,k}^{(a)} )}n_k^{(a)}$
(62) $\mu _i^{(b)} =(\delta _{ij} +u_{i,j}^{(b)} )\cdot\\ \qquad\dfrac{\partial A\lt(\dfrac{1}{2}u_{j,k}^{(b)} +\dfrac{1}{2}u_{k,j}^{(b)} +\dfrac{1}{2}u_{i,j}^{(b)} u_{i,k}^{(b)} )}{\partial \lt(\dfrac{1}{2}u_{j,k}^{(b)} +\dfrac{1}{2}u_{k,j}^{(b)} +\dfrac{1}{2}u_{i,j}^{(b)} u_{i,k}^{(b)} )}n_k^{(b)}$
(63) $ \kappa _i^{(a)} =-(\delta _{ij} +u_{i,j}^{(a)} )\cdot\\ \qquad\dfrac{\partial A\lt(\dfrac{1}{2}u_{j,k}^{(a)} +\dfrac{1}{2}u_{k,j}^{(a)} +\dfrac{1}{2}u_{i,j}^{(a)} u_{i,k}^{(a)} )}{\partial \lt(\dfrac{1}{2}u_{j,k}^{(a)} +\dfrac{1}{2}u_{k,j}^{(a)} +\dfrac{1}{2}u_{i,j}^{(a)} u_{i,k}^{(a)} )}n_k^{(a)}$
(64) $\lambda _i^{(c)} =p\delta _{ij} n_j^{(c)}$
(65) $\lambda _i^{(d)} =-p\delta _{ij} n_j^{(d)}$
(66) $\eta _i^{(c)} =p\delta _{ij} n_j^{(c)}$
将式(61)、式(63)、式(64)和式(66)代入式(59), 经变换, 可得适于有限元计算的位移杂交元模型.
通过如上的推导有限元列式的过程可以发现, 应用Lagrange方程推导的一个特点是不出现对时间的积分. 从事飞行器强度计算的学者明白, 强度计算是相对于特定的"设计情况"进行的, 而所谓设计情况, 是飞行器飞行中的某个部位受力严重的特定的瞬间状态, 并不涉及对时间的积分. 这也说明应用Lagrange方程来解决这类问题的优越性. 应用Lagrange方程建立有限元模型的另一个优越性, 不涉及对时间的积分特性便于将大量静力学有限元素法的计算技术和开发的大量计算程序移植到刚-弹耦合动力学、刚-黏弹耦合动力学、刚-液耦合动力学、刚-热-弹耦合动力学、刚-弹-液耦合动力 学和刚-弹-液-控耦合动力学中.
4.3 非保守非线性刚-弹-控耦合分析动力学问题
在控制方程(47)$\sim$(56)中, 如果忽略式(54)和式(55)的影响, 可以将弹-液耦合解耦, 从而可以独立的研究刚-弹-控和刚-液-控耦合的应用问题.
本节研究非保守非线性刚-弹-控耦合动力学问题, 其控制方程为式(47)$\sim\!$式(51), 但是, 要忽略关于$\rho ^{\rm q}$的惯性耦合项. 在考虑惯性耦合的情况下, 研究梁式太阳能帆板的振动问题, 其特性方程为
(67) $ A\rho \dfrac{\partial ^2w}{\partial t^2}+\dfrac{\partial ^2}{\partial x^2}\lt(EI\dfrac{\partial ^2w}{\partial x^2})-N\dfrac{\partial ^2w}{\partial x^2}=0 $
与一般的特性方程相比, 多出离心惯性力导致的"$-N\partial ^2w/\partial x^2$"项, 其角频率方程为
(68) $ \omega _{\rm m} =\gamma _{\rm m} \sqrt {\gamma _{\rm m}^2 c^2+\bar{{N}}} =\gamma _{\rm m}^2 \sqrt {\dfrac{EI+N/\gamma _{\rm m}^2 }{\rho A}} $
与一般的角频率方程相比, 多出离心惯性力导致的"$+N/\gamma _{\rm m}^2 $"动力刚化项.
另一方面, 同样在考虑惯性耦合的情况下, 研究自由梁的振动问题(可以将飞行器简化为自由梁或者称为无约束梁), 研究结果表明, 无论是自由梁的奇数阶振型或者偶数阶振型, 梁中的质点都不是绕梁的中性轴做往复振动, 而是绕振动中心轴作往复振动. 梁的中性轴和振动中心轴之间, 既有往复运动的线位移$D$, 又有往复摆动的角位移$C$
(69) $\varphi (x)=Cx+D$
图2
图2
无约束梁自由振动的三阶振型
Fig. 2
The third mode of free vibration of unconstrained beams
图3
图3
无约束梁自由振动的二阶振型
Fig. 3
The second mode of free vibration of unconstrained beams
这便说明, 如果简化为自由梁的飞行器被激振前为水平等速直线运动, 则自由梁振动的奇数阶振型和偶数阶振型的作用, 可以使自由梁的运动轨迹和运动姿态产生微小的扰动. 进一步引申这一结果的意义, 因为飞行器的刚体运动与控制之间存在接触耦合, 振动对刚体运动(运动轨迹和运动姿态)的影响可以耦合到控制系统中去. 这就为研究飞行器结构振动对控制的影响提供了参考.
4.4 非保守非线性刚-液-控耦合分析动力学问题
本节研究非保守非线性刚-液-控耦合动力学问题, 其控制方程为式(47)$\sim\!$式(49)、式(52)、式(53), 但是, 要忽略关于$\rho ^{\rm e}$的惯性耦合项.
参照刚-弹-控耦合动力学的研究情况, 研究刚-液-控耦合动力学也分两个方面. 一方面刚体动力学产生的惯性力对流体动力学的影响. 另一方面, 研究流体动力学产生的惯性力对刚体动力学的影响, 进而研究其对控制系统的影响. 太空的环境条件是十分严酷的, 特别是轨道空间存在高真空、高辐射和失重状态的影响. 在失重状态下, 表面张力的作用凸显出来, 因此, 应着重研究在失重条件下的表面张力的特性. 这一研究与文献[45 ] 的论述是一致的: 在涉及液体的相关耦合问题方面, 自由液面边界问题比较复杂, 可分为运动学边界条件和动力学边界条件, 需要对于线性和非线性情形(特别是航天背景中表面张力需要考虑表面张力、接触角及接触线动力学问题边界条件)分别展开讨论.
4.5 非保守非线性弹-液耦合分析动力学问题
姿态方程、轨迹方程和控制系统方程一起, 可以组成飞行器的有控飞行力学问题. 如果假设这类有控飞行力学问题已经解决, 则可近似地认为控制方程(47)$\sim$(49)与控制方程(50)$\sim$(56)之间已经解耦. 这时便可以将控制方程(50)$\sim$(56)处理为非惯性坐标系中的弹-液耦合动力学问题. 这也是飞行器强度计算的一般处理方法. 作者专门研究了与控制方程(50)$\sim$(56)构成的非保守非线性弹-液耦合动力学控制方程的应用问题, 将文献[43 ,44 ] 的研究推广到非惯性系中的流固耦合问题中. 专家评价对这类系统有限元建模、计算及结果分析、讨论具有重要的参考价值.
综合4.3$\sim $4.5节的结果, 可以近似的看出非保守非线性刚-弹-液-控耦合动力学控制方程的应用的效果. 精确的研究非保守非线性刚-弹-液-控耦合动力学控制方程的应用(解析解), 在数学上说是要应用刚-弹-液-控耦合动力学全部控制方程式(47)$\sim$(56), 这是较为困难的, 可以应用较为简单的算例来试探. 对于较为复杂的算例, 建议应用4.1或4.2节的有限元法来试探.
5 结论
(1) 建立了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理和Lagrange方程, 应用系统的Lagrange方程推导出非保守非线性刚-弹-液-控耦合分析动力学的控制方程.
(2) 从Hamilton型拟变分原理的泛函和应用Lagrange方程得到的控制方程都说明: 刚-弹耦合和刚-液耦合是惯性耦合, 弹-液耦合和控-刚耦合是接触耦合.
(3) 从两个方面概要地研究了非保守非线性刚-弹-液-控耦合系统的Lagrange方程的应用.
① 应用Lagrange方程建立了相应的位移协调元和杂交元计算模型, 分析了这类计算模型的优越性;
② 应用系统的控制方程对实际问题进行解析的分析讨论, 说明了应用解析的分析讨论来研究问题与应用数值的、定量的分析方法来研究问题的互补特性.
致谢
在完成本文的过程中, 得到刚-弹-液-控耦合动力学专家岳宝增教授的热情帮助, 作者表示衷心感谢!
参考文献
View Option
[1]
李青 , 王天舒 , 马兴瑞 . 充液航天器液体晃动和液固耦合动力学的研究与应用
力学进展 , 2012 ,42 (4 ):471 -480
DOI
URL
[本文引用: 1]
Random vibration is an important part of spacecraft structure design. Now, the main method used in the structural strength design of spacecrafts is equivalent static design method. Its equivalent principles include equivalent acceleration response, equivalent displacement response and equivalent stress response. Respective theories, methods, domestic and overseas research status, advantages and disadvantages and engineering applications are presented. The design method based on the peak values of displacement and stress response is recommended. And the problems in need of further research are finally suggested.
( Li Qing Wang Tianshu Ma Xingrui . Reviews on liquid sloshing dynamics and liquid-structures coupling dynamics in liquid-filled spacecrafts
Advances in Mechanics 2012 ,42 (4 ):471 -480 (in Chinese))
DOI
URL
[本文引用: 1]
Random vibration is an important part of spacecraft structure design. Now, the main method used in the structural strength design of spacecrafts is equivalent static design method. Its equivalent principles include equivalent acceleration response, equivalent displacement response and equivalent stress response. Respective theories, methods, domestic and overseas research status, advantages and disadvantages and engineering applications are presented. The design method based on the peak values of displacement and stress response is recommended. And the problems in need of further research are finally suggested.
[2]
岳宝增 , 宋小娟 . 具有刚-柔-液-控耦合的航天器动力学研究进展
力学进展 , 2013 ,43 (1 ):163 -173
DOI
URL
[本文引用: 2]
This paper summarized the recent research progress about the attitude nonlinear dynamics of liquid filled spacecraft and coupling dynamics of multi-body-liquid-control nonlinear systems. The developments and achievements in some important research fields, such as dynamics modeling of liquidlled spacecraft with flexible appendage, liquid sloshing dynamics modeling, nonlinear theory and method for spacecrafts with coupling of multi-body-liquid-control, numerical simulation and experiments, are reviewed. The prospects of future researches on concerned topics are also presented in the final section.
( Yue Baozeng Song Xiaojuan . Advances in rigid-flexible-liquid-control coupling dynamics of spacecraft
Advances in Mechanics 2013 ,43 (1 ):163 -173 (in Chinese))
DOI
URL
[本文引用: 2]
This paper summarized the recent research progress about the attitude nonlinear dynamics of liquid filled spacecraft and coupling dynamics of multi-body-liquid-control nonlinear systems. The developments and achievements in some important research fields, such as dynamics modeling of liquidlled spacecraft with flexible appendage, liquid sloshing dynamics modeling, nonlinear theory and method for spacecrafts with coupling of multi-body-liquid-control, numerical simulation and experiments, are reviewed. The prospects of future researches on concerned topics are also presented in the final section.
[3]
Wu WJ Yue BZ Huang H . Coupling dynamic analysis of spacecraft with multiple cylindrical tanks and flexible appendages
Acta Mechanica Sinica 2016 ,32 (1 ):144 -155
DOI
URL
[本文引用: 1]
[4]
Yue BZ Wu WJ Yan YL . Modeling and coupling dynamics of the spacecraft with multiple propellant tanks
AIAA Journal 2016 ,54 (11 ):3608 -3618
DOI
URL
[本文引用: 1]
[5]
Yan YL Yue BZ . Analytical method for the attitude stability of partially liquid filled spacecraft with flexible appendage
Acta Mechanica Sinica 2017 ,33 (1 ):208 -218
DOI
URL
[本文引用: 1]
[6]
Tang Y Yue BZ . Simulation of large-amplitude three-dimensional liquid sloshing in spherical tanks
AIAA Journal 2017 ,55 (6 ):1 -8
DOI
URL
[本文引用: 1]
[7]
Tang Y Yue BZ Yan YL . Improved method for implementing contact angle condition in simulation of liquid sloshing under microgravity
International Journal for Numerical Methods in Fluids 2019 ,89 (4-5 ):123 -142
DOI
URL
[本文引用: 1]
[8]
Yan YL Yue BZ . Dynamic analysis of the flexible spacecraft with liquid sloshing in axisymmetrical container
Journal of Spacecraft and Rocket 2018 ,55 :282 -291
DOI
URL
[本文引用: 1]
[9]
Liu F Yue BZ Zhao LY . Attitude dynamics and control of spacecraft with a partially filled liquid tank and flexible panels
Acta Astronautica 2018 ,143 :327 -336
DOI
URL
[本文引用: 1]
[10]
李晓玉 , 岳宝增 . 基于多尺度方法的平动圆柱贮箱航天器刚-液耦合动力学研究
力学学报 , 2019 ,51 (5 ):1448 -1454
[本文引用: 1]
( Li Xiaoyu Yue Baozeng . Study on the rigid-liquid coupling dynamics of a cylindrical-tank spacecraft in translation based on muti-scale method
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (5 ):1448 -1454 (in Chinese))
[本文引用: 1]
[11]
孙家亮 , 田强 , 胡海岩 . 多柔体系统动力学建模与优化研究进展
力学学报 , 2019 ,51 (6 ):1565 -1586
[本文引用: 1]
( Sun Jialiang Tian Qiang Hu Haiyan . Advances in dynamic modeling and optimization of flexible multibody systems
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (6 ):1565 -1586 (in Chinese)).
[本文引用: 1]
[12]
曹登庆 , 白坤朝 , 丁虎 等 . 大型柔性航天器动力学与振动控制研究进展
力学学报 , 2019 ,51 (1 ):1 -13
URL
[本文引用: 1]
( Cao Dengqing Bai Kunchao Ding Hu , et al . Advances in dynamics and vibration control of large-scale flexible spacecraft
Chinese Journal of Theoretical and Applied Mechanics 2019 ,51 (1 ):1 -13 (in Chinese))
URL
[本文引用: 1]
[13]
王照林 , 刘延柱 . 充液系统动力学 . 北京 : 科学出版社 , 2002
[本文引用: 1]
( Wang Zhaolin Liu Yanzhu . Dynamics of Liquid Filled System . Beijing : Science Press , 2002 (in Chinese))
[本文引用: 1]
[14]
陈滨 . 分析动力学(第2版) . 北京 : 北京大学出版社 , 2012
[本文引用: 1]
( Chen Bin . Analytical Dynamics (2nd Edn) . Beijing : Peking University Press , 2012 (in Chinese))
[本文引用: 1]
[15]
梅凤翔 . 分析力学(下卷) . 北京 : 北京理工大学出版社 , 2013
[本文引用: 1]
( Mei Fengxiang . Analytical Mechanics (Vol II) . Beijing : Beijing University of Technology Press , 2013 (in Chinese))
[本文引用: 1]
[16]
钱学森 , 工程控制论(新世纪版) . 上海 : 上海交通大学出版社 , 2007
[本文引用: 1]
( Qian Xueshen . Engineering Cybernetics (New Century Edition) . Shanghai : Shanghai Jiaotong University Press , 2007 (in Chinese))
[本文引用: 1]
[17]
刘豹 , 唐万生 . 现代控制理论(第3版) . 北京 : 机械工业出版社 , 2007
[本文引用: 1]
( Liu Bao Tang Wansheng . Modern Control Theory (Third Edn) . Beijing : China Machine Press , 2007 (in Chinese))
[本文引用: 1]
[18]
王孝武 , 张小红 , 现代控制理论基础(第2版) . 北京 : 机械工业出版社 , 2006
( Wang Xiaowu Zhang Xiaohong . Fundamentals of Modern Control Theory (Second Edn) . Beijing : China Machine Press , 2006 (in Chinese))
[19]
胡寿松 . 自动控制原理(第5版) . 北京 : 科学出版社 , 2007
[本文引用: 1]
( Hu Shousong . Principles of Automatic Control (Fifth Edn) . Beijing : Science Press , 2007 (in Chinese))
[本文引用: 1]
[20]
马兴瑞 , 王本利 , 苟兴宇 . 航天器动力学——若干问题进展及应用 . 北京 : 科学出版社 , 2001
[本文引用: 1]
( Ma Xingrui Wang Benli Gou Xingyu . Spacecraft Dynamics-Progress and Application of Some Problems . Beijing : Science Press , 2001 (in Chinese))
[本文引用: 1]
[21]
Liang LF Hu HC . Generalized variational principle of three kinds of variables in general mechanics
Science in China $($Ser.A$)$ 2001 ,44 (6 ):770 -776
[本文引用: 1]
[22]
Liang LF Hu HC Liu SQ . Non-contemporaneous variations and Holder's principle
Science in China $($G$)$ 2003 ,46 (5 ):450 -459
[23]
梁立孚 . 变分原理及其应用 . 哈尔滨 : 哈尔滨工程大学出版社等五社联合出版 , 2005
( Liang Lifu . Principles of Variation and Its Application . Harbin : Joint Publishing House of Harbin University of Engineering Press, etc , 2005 (in Chinese))
[24]
Liang LF Liu DK Song HY . The generalized quasi-variational principles of non-conservative systems with two kinds of variables
Science in China $($Ser.G$)$ 2005 ,48 (5 ):600 -613
[25]
罗恩 , 梁立孚 , 李纬华 . 分析力学的非传统Hamilton型变分原理
中国科学(G) , 2006 ,36 (6 ):633 -643
URL
( Luo En Liang Lifu Li Weihua . Unconventional Hamiltonian variational principles in analytical mechanics
Science in China $($Ser.G$)$ 2006 ,36 (6 ):633 -643 (in Chinese))
URL
[26]
梁立孚 , 罗恩 , 冯晓九 . 分析力学初值问题的一种变分原理形式
力学学报 , 2007 ,39 (1 ):106 -111
( Liang Lifu Luo En Feng Xiaojiu . A variational principle form for initial value problems in analytical mechanics
Chinese Journal of Theoretical and Applied Mechanics 2007 ,39 (1 ):106 -111 (in Chinese))
[27]
梁立孚 , 刘宗民 , 刘殿魁 . 非保守薄壁结构系统的广义拟余Hamilton原理及其应用
工程力学 , 2008 ,25 (10 ):60 -65
( Liang Lifu Liu Zongmin Liu Diankui . Generalized Hamilton-type quasi-complementary energy principle of non-conservative thin-wall structural system and its application
Engineering Mechanics 2008 ,25 (10 ):60 -65 (in Chinese))
[28]
赵淑红 , 梁立孚 , 周平 . 带有平动附件多柔体簇系统动力学拟变分原理及其应用
工程力学 , 2011 ,28 (6 ):29 -39
URL
Kinematics of a flexible multi-body cluster system is described according to a mixed coordinate method. Kinetic energy of the annex and the root body is obtained. Then the quasi-variational principle of flexible multi-body cluster system dynamics with the annex of an extendable translation is established. Applying involutory transformations, the quasi-variational principle of flexible multi-body cluster system dynamics with two kinds of variables is established. Through the deduction of quasi-stationary value conditions of quasi-variational principles, quasi-variational principles have been tested. Finally, according to the quasi-stationary value condition of a Hamiltonian principle on flexible multi-body cluster system dynamics, the vibration differential equation of annex of spacecraft is established.
( Zhao Shuhong Liang Lifu Zhou Ping . Quasi-variational principles of flexible multi-body cluster system dynamics with annex of extendable translation and their applications
Engineering Mechanics 2011 ,28 (6 ):29 -39 (in Chinese))
URL
Kinematics of a flexible multi-body cluster system is described according to a mixed coordinate method. Kinetic energy of the annex and the root body is obtained. Then the quasi-variational principle of flexible multi-body cluster system dynamics with the annex of an extendable translation is established. Applying involutory transformations, the quasi-variational principle of flexible multi-body cluster system dynamics with two kinds of variables is established. Through the deduction of quasi-stationary value conditions of quasi-variational principles, quasi-variational principles have been tested. Finally, according to the quasi-stationary value condition of a Hamiltonian principle on flexible multi-body cluster system dynamics, the vibration differential equation of annex of spacecraft is established.
[29]
Liang LF Liu SQ Zhou JS . Quasi-variational principles of single flexible body dynamics and their applications
Science in China $($Ser.G$)$ 2009 ,52 (5 ):775 -787
[30]
梁立孚 , 郭庆勇 . 刚体动力学的拟变分原理及其应用
力学学报 , 2010 ,42 (2 ):300 -305
URL
为了适应航天事业发展的需要,极有必要开展多柔体系统的理论分析.作为应用非保守系统的拟变分原理进行多柔体动力学的理论分析的组成部分,研究了刚体动力学的拟变分原理及其应用:建立了刚体动力学的拟变分原理,推导出刚体动力学的拟变分原理的拟驻值条件; 建立了刚体动力学的广义拟变分原理,说明了应用广义拟变分原理求得问题的解析解和数值解的途径; 最后,借助算例说明了应用变分方法来研究刚体动力学问题的优越性.
( Liang Lifu Guo Qingyong . The quasi-variational principles of rigid-body dynamics and their applications
Journal of Theoretical and Applied Mechanics 2010 ,42 (2 ):300 -305 (in Chinese))
URL
为了适应航天事业发展的需要,极有必要开展多柔体系统的理论分析.作为应用非保守系统的拟变分原理进行多柔体动力学的理论分析的组成部分,研究了刚体动力学的拟变分原理及其应用:建立了刚体动力学的拟变分原理,推导出刚体动力学的拟变分原理的拟驻值条件; 建立了刚体动力学的广义拟变分原理,说明了应用广义拟变分原理求得问题的解析解和数值解的途径; 最后,借助算例说明了应用变分方法来研究刚体动力学问题的优越性.
[31]
李海波 , 宋海燕 , 梁立孚 . 确定无约束梁耦合振型的一种途径
强度与环境 , 2011 ,38 (2 ):6 -12
[本文引用: 1]
( Li Haibo Haiyan Song Lifu Liang . An approach of coupled vibration mode determined of unrestrained beam
Structure & Environment Engineering 2011 ,38 (2 ):6 -12 (in Chinese))
[本文引用: 1]
[32]
Liang LF Song HY . Non-linear and non-conservative quasi- variational principle of flexible body dynamics and application in spacecraft dynamics
Science China Physics, Mechanics & Astronomy 2013 ,56 (11 ):2192 -2199
DOI
URL
[本文引用: 1]
[33]
Ma CY Feng XJ Liang LF . Variational principles of optimal control in holonomic and nonholonomic systems
// International Conference on Mechanics and Control Engineering, Nanjing, Jiangsu, China, Apr . 11 -12, 2015
[本文引用: 1]
[34]
梁立孚 , 宋海燕 , 樊涛 等 . 非保守系统的拟变分原理及其应用 . 北京 : 科学出版社 , 2015
( Liang Lifu Song Haiyan Fan Tao , et al . Quasi Variational Principles of Nonconservative Systems and Their Applications . Beijing : Science Press , 2015 (in Chinese))
[35]
Song HY Liang LF . Investigation of power-type variational principles in liquid-filled system
Applied Mathematics and Mechanics $($English Edition$)$ 2015 ,36 (12 ):1651 -1662
[36]
冯晓九 , 梁立孚 , 宋海燕 . 刚-弹-液耦合动力学的功能型拟变分原理
中国科学-技术科学 , 2016 ,46 (2 ):195 -203
DOI
URL
( Feng Xiaojiu Liang Lifu Song Haiyan . Quasi variational principle of the rigid-elastic-liquid coupling dynamics
Scientia Sinica: Technologica 2016 ,46 (2 ):195 -203 (in Chinese))
DOI
URL
[37]
梁立孚 , 宋海燕 , 李海波 . 航天分析动力学 . 北京 : 科学出版社 , 2016
( Liang Lifu Song Haiyan Li Haibo . Aerospace Analytical Dynamics Beijing : Science Press , 2016 (in Chinese))
[38]
周平 , 李海波 , 梁立孚 . 刚弹耦合动力学初值问题拟变分原理及其应用
北京航空航天大学学报 , 2017 ,43 (7 ):1321 -1329
( Zhou Ping Li Haibo Liang Lifu . Quasi-variational principle and application of initial value problem for rigid-elastic coupling dynamics
Beijing University of Aeronautics and Astronautics 2017 ,43 (7 ):1321 -1329 (in Chinese))
[39]
Feng XJ Liang LF Song HY . Application of Lagrange's equation to rigid-elastic coupling dynamics
Science China Technological Sciences 2017 ,60 (8 ):1263 -1277
DOI
URL
[40]
梁立孚 , 周平 . Lagrange方程应用于流体动力学
哈尔滨工程大学学报 , 2018 ,39 (1 ):33 -39
( Liang Lifu Zhou Ping . Application of Lagrange equation in fluid mechanics
Journal of Harbin Engineering University 2018 ,39 (1 ):33 -39 (in Chinese))
[41]
梁立孚 , 郭庆勇 . 航天刚-弹-液耦合系统的弹-液耦合研究
北京航空航天大学学报 , 2019 ,45 (2 ):243 -251
[本文引用: 1]
( Liang Lifu Guo Qingyong . Elastic-liquid coupling in aerospace rigid-elastic-liquid coupling system
Journal of Beijing University of Aeronautics and Astronautics 2019 ,45 (2 ):243 -251 (in Chinese))
[本文引用: 1]
[42]
梁立孚 , 郭庆勇 , 宋海燕 . 连续介质分析动力学及其应用
力学进展 , 2019 ,49 :201908
URL
[本文引用: 1]
( Liang Lifu Guo Qingyong Song Haiyan . Analytical dynamics of continuous medium and its application
Advances in Mechanics 2019 ,49 :201908 (in Chinese))
URL
[本文引用: 1]
[43]
邢景棠 , 周盛 , 崔尔杰 . 流固耦合力学概述
力学进展 , 1997 ,27 (1 ):19 -38
URL
[本文引用: 2]
This paper reviews the fluid solid interaction mechanics and its principal characteristics research topics, some advances and the tendency of further developments.
( Xing Jingtang Zhou Sheng Cui Erjie . A survey on the fluid-solid interaction mechnics
Advances in Mechanics 1997 ,27 (1 ):19 -38 (in Chinese))
URL
[本文引用: 2]
This paper reviews the fluid solid interaction mechanics and its principal characteristics research topics, some advances and the tendency of further developments.
[44]
Xing JT . Developments of numerical method for linear and nonlinear fluid-solid interaction dynamics with applications
Advances in Mechanics 2016 ,46 (2 ):95 -139
[本文引用: 2]
[45]
岳宝增 . 液体大幅晃动动力学 . 北京 : 科学出版社 , 2012
[本文引用: 1]
( Yue Baozeng . Dynamics of Large Liquid Sloshing . Beijing : Science Press , 2012 (in Chinese))
[本文引用: 1]
充液航天器液体晃动和液固耦合动力学的研究与应用
1
2012
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
充液航天器液体晃动和液固耦合动力学的研究与应用
1
2012
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
具有刚-柔-液-控耦合的航天器动力学研究进展
2
2013
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
... [2 ]. 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
具有刚-柔-液-控耦合的航天器动力学研究进展
2
2013
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
... [2 ]. 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Coupling dynamic analysis of spacecraft with multiple cylindrical tanks and flexible appendages
1
2016
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Modeling and coupling dynamics of the spacecraft with multiple propellant tanks
1
2016
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Analytical method for the attitude stability of partially liquid filled spacecraft with flexible appendage
1
2017
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Simulation of large-amplitude three-dimensional liquid sloshing in spherical tanks
1
2017
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Improved method for implementing contact angle condition in simulation of liquid sloshing under microgravity
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Dynamic analysis of the flexible spacecraft with liquid sloshing in axisymmetrical container
1
2018
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Attitude dynamics and control of spacecraft with a partially filled liquid tank and flexible panels
1
2018
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
基于多尺度方法的平动圆柱贮箱航天器刚-液耦合动力学研究
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
基于多尺度方法的平动圆柱贮箱航天器刚-液耦合动力学研究
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
多柔体系统动力学建模与优化研究进展
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
多柔体系统动力学建模与优化研究进展
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
大型柔性航天器动力学与振动控制研究进展
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
大型柔性航天器动力学与振动控制研究进展
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2002
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2002
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2012
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2012
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2013
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2013
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2007
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2007
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2007
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2007
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2007
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2007
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2001
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
1
2001
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Generalized variational principle of three kinds of variables in general mechanics
1
2001
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Non-contemporaneous variations and Holder's principle
2003
The generalized quasi-variational principles of non-conservative systems with two kinds of variables
2005
分析力学的非传统Hamilton型变分原理
2006
分析力学的非传统Hamilton型变分原理
2006
非保守薄壁结构系统的广义拟余Hamilton原理及其应用
2008
非保守薄壁结构系统的广义拟余Hamilton原理及其应用
2008
带有平动附件多柔体簇系统动力学拟变分原理及其应用
2011
带有平动附件多柔体簇系统动力学拟变分原理及其应用
2011
Quasi-variational principles of single flexible body dynamics and their applications
2009
确定无约束梁耦合振型的一种途径
1
2011
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
确定无约束梁耦合振型的一种途径
1
2011
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Non-linear and non-conservative quasi- variational principle of flexible body dynamics and application in spacecraft dynamics
1
2013
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Variational principles of optimal control in holonomic and nonholonomic systems
1
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
Investigation of power-type variational principles in liquid-filled system
2015
刚弹耦合动力学初值问题拟变分原理及其应用
2017
刚弹耦合动力学初值问题拟变分原理及其应用
2017
Application of Lagrange's equation to rigid-elastic coupling dynamics
2017
航天刚-弹-液耦合系统的弹-液耦合研究
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
航天刚-弹-液耦合系统的弹-液耦合研究
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
连续介质分析动力学及其应用
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
连续介质分析动力学及其应用
1
2019
... 非保守非线性刚-弹-液-控耦合分析动力学是与航天动力学和多体动力学相关的重要研究课题之一. 对于这一学术领域在国内外的研究进展, 文献[1 ,2 ] 做了很好的综述. 文献[3 ,4 ,5 ,6 ,7 ,8 ,9 ,10 ,11 ,12 ] 可以反映出近年来新的进展. 此外, 还参考了充液系统动力学[13 ] 、 分析动力学[14 -15 ] 、工程控制论[16 ] 和自动控制[17 -19 ] 的几部专著. 对于20世纪的研究情况, 文献[20 ] 指出: "由于多柔体构形的复杂性,目前解决多柔体动力学问题主要是依赖于数值的、定量的分析方法, 几乎没有人进行解析的分析讨论, 这对于深刻把握系统的非线性力学实质、预测系统的全局动力学现象是十分不利的. 因此, 极有必要开展多柔体系统的理论分析, 当然, 这是一个十分复杂的问题, 解决它可能需要很长的时间. "作者有关的研究工作就是在这一论述的启发下展开的. 由于分析力学的特点, 应用分析力学中的Hamilton型变分原理和Lagrange方程进行多柔体系统的解析的分析讨论和理论分析是一条可行的途径. 经过十余年的潜心研究[21 -31 ] , 至2013年研究非线性、非保守柔体动力学拟变分原理及其在航天器动力学中的应用[32 ] , 多柔体系统的解析分析讨论和理论分析已经基本实现. 进而, 适时地拓宽了研究领域: 应用现代非线性力学的理论成果和分析方法对航天工程中的刚(柔)$-\!$液-控耦合动力学的耦合机理进行深入探索, 并预见带柔性附件充液航天器的动力学响应特征, 从而为复杂结构航天器的设计与分析提供理论参考[2 ] . 又经过多年的艰苦的研究工作[33 -41 ] , 至2019年《力学进展》发表了《连续介质分析动力学及其应用》一文, 比较全面地介绍了研究成果[42 ] . 正是在经过新世纪以来的近20年的研究积累的基础上, 尝试性地研究了非保守非线性刚-弹-液-控耦合系统的Hamilton型拟变分原理, 从系统的Hamilton型拟变分原理出发, 借助Lagrange-Hamilton体系, 建立了刚-弹-液-控耦合系统的Lagrange方程, 应用该Lagrange方程建立了系统的控制方程. 并应用Lagrange方程建立了相应的有限元计算模型, 研究了系统的控制方程的应用, 探索进行解析的分析讨论的途径. ...
流固耦合力学概述
2
1997
... 注意到$\delta \varPi_{\rm reqc}$为刚-弹-液-控耦合动力学两类变量的拟变分原理的定积分形式泛函的变分; $\pi_{\rm c}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0}^{t_1}\pi _{\rm c} {\rm d}t$形式上与电动机动力学的Hamilton变分原理的泛函相同, 认为是保守系统); $\pi_{\rm r}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm r} {\rm d}t}$形式上与刚体动力学的Hamilton型拟变分原理的泛函相同); $\pi_{\rm e}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm e} {\rm d}t}$形式上与弹性动力学的Hamilton型拟变分原理的泛函相同); $\pi_{\rm q}$为$\varPi_{\rm reqc}$的另一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm q} {\rm d}t}$形式上与流体力学的Hamilton型拟变分原理的泛函相同). 明显可见,刚-弹-液-控耦合系统两类变量的Hamilton型拟变分原理的定积分形式泛函$\varPi_{\rm reqc}$不是电动机动力学的Hamilton变分原理的泛函$\int_{t_0}^{t_1 } {\pi _{\rm c}{\rm d}t}$、刚体动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm r} {\rm d}t}$、弹性动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm e} {\rm d}t}$和流体动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm q} {\rm d}t}$的组合, 而是多出控-刚耦合项$-M_{\rm F}\cdot\phi+M_{\rm c}\cdot \theta+F_{\rm c}\cdot X^{\rm r}$、刚-弹耦合项$\int_{t_0}^{t_1}\iiint_{V^{\rm e}}(v^{\rm c}+ \omega\times x^{\rm e})\cdot v^{\rm e}{\rm d}V{\rm d}t$、刚-液耦合项$\int_{t_0}^{t_1}\iiint_{V^{\rm q}}(v^{\rm c}+ \omega\times x^{\rm q})\cdot v^{\rm q}{\rm d}V{\rm d}t$和弹-液耦合项$\iint_{S_{\rm eq}}(T^{\rm eq}\cdot u^{\rm e}+T^{\rm qe}\cdot u^{\rm q}){\rm d}S$. 明显可见, 刚-弹-液-控耦合中的刚-弹耦合和刚-液耦合是惯性耦合, 而弹-液耦合和控-刚耦合是接触耦合. 这里说明, 对于弹-液耦合, 在弹-液交界面$S_{\rm eq} $处, 内力满足平衡关系[43 -44 ] ...
... 姿态方程、轨迹方程和控制系统方程一起, 可以组成飞行器的有控飞行力学问题. 如果假设这类有控飞行力学问题已经解决, 则可近似地认为控制方程(47)$\sim$(49)与控制方程(50)$\sim$(56)之间已经解耦. 这时便可以将控制方程(50)$\sim$(56)处理为非惯性坐标系中的弹-液耦合动力学问题. 这也是飞行器强度计算的一般处理方法. 作者专门研究了与控制方程(50)$\sim$(56)构成的非保守非线性弹-液耦合动力学控制方程的应用问题, 将文献[43 ,44 ] 的研究推广到非惯性系中的流固耦合问题中. 专家评价对这类系统有限元建模、计算及结果分析、讨论具有重要的参考价值. ...
流固耦合力学概述
2
1997
... 注意到$\delta \varPi_{\rm reqc}$为刚-弹-液-控耦合动力学两类变量的拟变分原理的定积分形式泛函的变分; $\pi_{\rm c}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0}^{t_1}\pi _{\rm c} {\rm d}t$形式上与电动机动力学的Hamilton变分原理的泛函相同, 认为是保守系统); $\pi_{\rm r}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm r} {\rm d}t}$形式上与刚体动力学的Hamilton型拟变分原理的泛函相同); $\pi_{\rm e}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm e} {\rm d}t}$形式上与弹性动力学的Hamilton型拟变分原理的泛函相同); $\pi_{\rm q}$为$\varPi_{\rm reqc}$的另一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm q} {\rm d}t}$形式上与流体力学的Hamilton型拟变分原理的泛函相同). 明显可见,刚-弹-液-控耦合系统两类变量的Hamilton型拟变分原理的定积分形式泛函$\varPi_{\rm reqc}$不是电动机动力学的Hamilton变分原理的泛函$\int_{t_0}^{t_1 } {\pi _{\rm c}{\rm d}t}$、刚体动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm r} {\rm d}t}$、弹性动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm e} {\rm d}t}$和流体动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm q} {\rm d}t}$的组合, 而是多出控-刚耦合项$-M_{\rm F}\cdot\phi+M_{\rm c}\cdot \theta+F_{\rm c}\cdot X^{\rm r}$、刚-弹耦合项$\int_{t_0}^{t_1}\iiint_{V^{\rm e}}(v^{\rm c}+ \omega\times x^{\rm e})\cdot v^{\rm e}{\rm d}V{\rm d}t$、刚-液耦合项$\int_{t_0}^{t_1}\iiint_{V^{\rm q}}(v^{\rm c}+ \omega\times x^{\rm q})\cdot v^{\rm q}{\rm d}V{\rm d}t$和弹-液耦合项$\iint_{S_{\rm eq}}(T^{\rm eq}\cdot u^{\rm e}+T^{\rm qe}\cdot u^{\rm q}){\rm d}S$. 明显可见, 刚-弹-液-控耦合中的刚-弹耦合和刚-液耦合是惯性耦合, 而弹-液耦合和控-刚耦合是接触耦合. 这里说明, 对于弹-液耦合, 在弹-液交界面$S_{\rm eq} $处, 内力满足平衡关系[43 -44 ] ...
... 姿态方程、轨迹方程和控制系统方程一起, 可以组成飞行器的有控飞行力学问题. 如果假设这类有控飞行力学问题已经解决, 则可近似地认为控制方程(47)$\sim$(49)与控制方程(50)$\sim$(56)之间已经解耦. 这时便可以将控制方程(50)$\sim$(56)处理为非惯性坐标系中的弹-液耦合动力学问题. 这也是飞行器强度计算的一般处理方法. 作者专门研究了与控制方程(50)$\sim$(56)构成的非保守非线性弹-液耦合动力学控制方程的应用问题, 将文献[43 ,44 ] 的研究推广到非惯性系中的流固耦合问题中. 专家评价对这类系统有限元建模、计算及结果分析、讨论具有重要的参考价值. ...
Developments of numerical method for linear and nonlinear fluid-solid interaction dynamics with applications
2
2016
... 注意到$\delta \varPi_{\rm reqc}$为刚-弹-液-控耦合动力学两类变量的拟变分原理的定积分形式泛函的变分; $\pi_{\rm c}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0}^{t_1}\pi _{\rm c} {\rm d}t$形式上与电动机动力学的Hamilton变分原理的泛函相同, 认为是保守系统); $\pi_{\rm r}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm r} {\rm d}t}$形式上与刚体动力学的Hamilton型拟变分原理的泛函相同); $\pi_{\rm e}$为$\varPi_{\rm reqc}$的一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm e} {\rm d}t}$形式上与弹性动力学的Hamilton型拟变分原理的泛函相同); $\pi_{\rm q}$为$\varPi_{\rm reqc}$的另一个组成部分($\int_{t_0 }^{t_1 } {\pi _{\rm q} {\rm d}t}$形式上与流体力学的Hamilton型拟变分原理的泛函相同). 明显可见,刚-弹-液-控耦合系统两类变量的Hamilton型拟变分原理的定积分形式泛函$\varPi_{\rm reqc}$不是电动机动力学的Hamilton变分原理的泛函$\int_{t_0}^{t_1 } {\pi _{\rm c}{\rm d}t}$、刚体动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm r} {\rm d}t}$、弹性动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm e} {\rm d}t}$和流体动力学的Hamilton型拟变分原理的泛函$\int_{t_0}^{t_1}{\pi _{\rm q} {\rm d}t}$的组合, 而是多出控-刚耦合项$-M_{\rm F}\cdot\phi+M_{\rm c}\cdot \theta+F_{\rm c}\cdot X^{\rm r}$、刚-弹耦合项$\int_{t_0}^{t_1}\iiint_{V^{\rm e}}(v^{\rm c}+ \omega\times x^{\rm e})\cdot v^{\rm e}{\rm d}V{\rm d}t$、刚-液耦合项$\int_{t_0}^{t_1}\iiint_{V^{\rm q}}(v^{\rm c}+ \omega\times x^{\rm q})\cdot v^{\rm q}{\rm d}V{\rm d}t$和弹-液耦合项$\iint_{S_{\rm eq}}(T^{\rm eq}\cdot u^{\rm e}+T^{\rm qe}\cdot u^{\rm q}){\rm d}S$. 明显可见, 刚-弹-液-控耦合中的刚-弹耦合和刚-液耦合是惯性耦合, 而弹-液耦合和控-刚耦合是接触耦合. 这里说明, 对于弹-液耦合, 在弹-液交界面$S_{\rm eq} $处, 内力满足平衡关系[43 -44 ] ...
... 姿态方程、轨迹方程和控制系统方程一起, 可以组成飞行器的有控飞行力学问题. 如果假设这类有控飞行力学问题已经解决, 则可近似地认为控制方程(47)$\sim$(49)与控制方程(50)$\sim$(56)之间已经解耦. 这时便可以将控制方程(50)$\sim$(56)处理为非惯性坐标系中的弹-液耦合动力学问题. 这也是飞行器强度计算的一般处理方法. 作者专门研究了与控制方程(50)$\sim$(56)构成的非保守非线性弹-液耦合动力学控制方程的应用问题, 将文献[43 ,44 ] 的研究推广到非惯性系中的流固耦合问题中. 专家评价对这类系统有限元建模、计算及结果分析、讨论具有重要的参考价值. ...
1
2012
... 参照刚-弹-控耦合动力学的研究情况, 研究刚-液-控耦合动力学也分两个方面. 一方面刚体动力学产生的惯性力对流体动力学的影响. 另一方面, 研究流体动力学产生的惯性力对刚体动力学的影响, 进而研究其对控制系统的影响. 太空的环境条件是十分严酷的, 特别是轨道空间存在高真空、高辐射和失重状态的影响. 在失重状态下, 表面张力的作用凸显出来, 因此, 应着重研究在失重条件下的表面张力的特性. 这一研究与文献[45 ] 的论述是一致的: 在涉及液体的相关耦合问题方面, 自由液面边界问题比较复杂, 可分为运动学边界条件和动力学边界条件, 需要对于线性和非线性情形(特别是航天背景中表面张力需要考虑表面张力、接触角及接触线动力学问题边界条件)分别展开讨论. ...
1
2012
... 参照刚-弹-控耦合动力学的研究情况, 研究刚-液-控耦合动力学也分两个方面. 一方面刚体动力学产生的惯性力对流体动力学的影响. 另一方面, 研究流体动力学产生的惯性力对刚体动力学的影响, 进而研究其对控制系统的影响. 太空的环境条件是十分严酷的, 特别是轨道空间存在高真空、高辐射和失重状态的影响. 在失重状态下, 表面张力的作用凸显出来, 因此, 应着重研究在失重条件下的表面张力的特性. 这一研究与文献[45 ] 的论述是一致的: 在涉及液体的相关耦合问题方面, 自由液面边界问题比较复杂, 可分为运动学边界条件和动力学边界条件, 需要对于线性和非线性情形(特别是航天背景中表面张力需要考虑表面张力、接触角及接触线动力学问题边界条件)分别展开讨论. ...


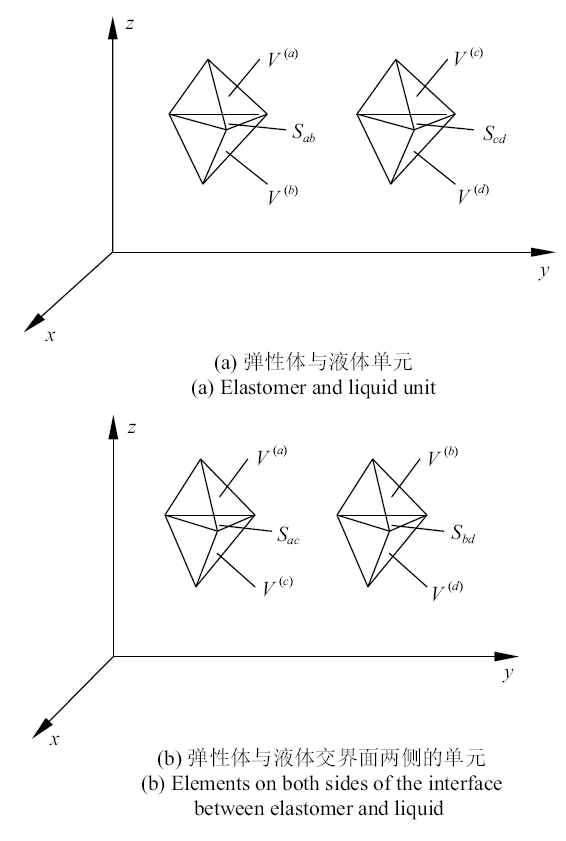
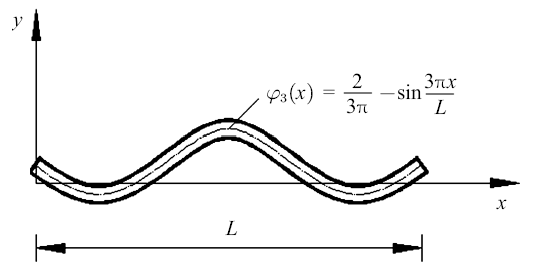
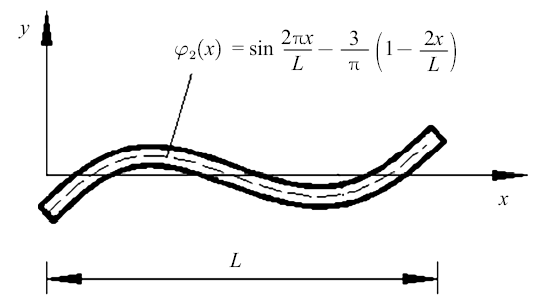


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}