

引言
滑坡是一种全球性的地质灾害, 它对世界上很多国家都造成了巨大的危害, 促使这些国家的研究人员不断探索滑坡灾害监测和预警的技术手段. 追溯滑坡监测的研究历史, 学界比较公认的时间起点为日本学者斋藤迪孝[1]在1963年提出滑坡预报经验公式时, 之后的几十年各种高新技术在滑坡监测领域中得到应用. 在滑坡监测技术的发展过程中, 有不少专家学者已经从不同角度以不同观点进行了系统的总结[2-3], 并对其发展趋势做出了展望. 而就目前我国的监测技术, 预警预报的成功率仍然较低, 如2016年共发生地质灾害9710起, 而全国共成功预报地质灾害只有676起[4],因此开展滑坡监测新技术的探索具有较高的参考价值.
在滑坡破坏过程中次声波监测机理研究方面. Chai等[20]通过单轴压缩试验发现花岗岩破裂过程中也产生次声信号. 朱星等[21-22]以岩体稳定性监测为目的, 对6种典型的岩石试样单轴全过程加载试验过程中的次声波信号进行了实时监测, 并对数字次声波信号进行了处理与分析. 徐洪等[23]对岩石变形破坏次声异常的能量特征进行分析, 研究结果为岩石破坏前兆预警提供了重要依据. 贾炳等[24-30]以次声波技术应用于监测、预警矿井煤岩动力灾害为目的, 相继开展了大量的研究, 通过进行煤岩试样的单轴加载试验, 对采集的次声信号的相对能量和频率进行分析, 发现相对能量和频率具有明显的阶段性. 除了进行实验室物理模型试验次声波的研究外, 朱星等[31]还对大光包滑坡侧缘拉裂壁岩崩进行次声监测, 并分析了岩崩次声的基本特征. 上述研究结果为岩质滑坡次声波监测提供了理论参考, 但对土质滑坡次声波监测的研究鲜有报道. 基于此, 考虑到滑坡的主要力学破坏方式为剪切破坏, 开展土剪破坏次声监测试验研究, 分析了剪切过程中的微观声学响应[32-34], 探索土质滑坡中次声产生机理, 为实现土质滑坡次声波监测提供理论参考.
1 土体直剪实验次声-力-位移联合监测系统
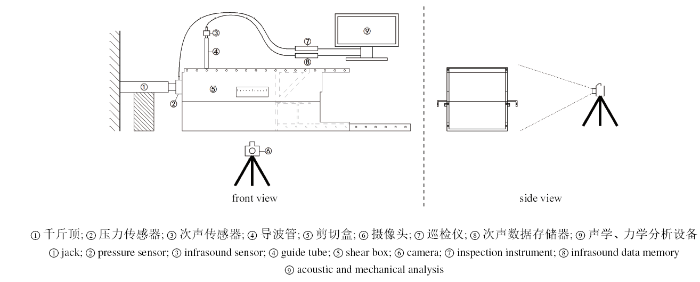
在实验中, 土体直剪实验力-声联合监测系统主要由变尺寸直剪盒、力学数据采集模块、声学数据采集模块以及位移采集模块四部分组成, 如图1所示.
图1
1.1 变尺寸直剪盒设计
传统的应变控制式直剪仪在进行土体剪切实验时, 采用的土样规格一般为面积30 cm$^{2}$高2 cm的圆柱, 可以实时获取剪切应力与剪切位移数据, 但不能采集声波信号, 而在此尺寸下的土样在剪切过程中所产生的声波能量又是非常微小, 因此本研究需要设计一个大尺寸且尺寸可变的剪切仪器, 在本论文中称之为变尺寸直剪盒.
图2

图3

1.2 力学数据采集模块
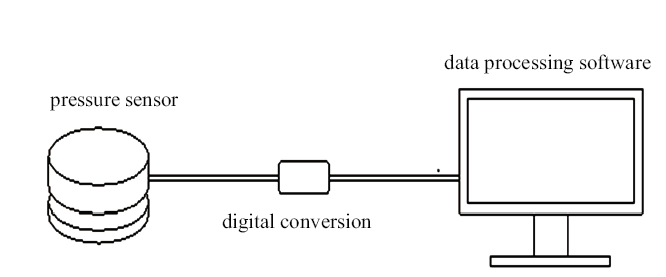
在实验中需要对土样剪切过程中的推力进行实时采集, 因此需要一套合适的力学数据采集系统. 本研究中使用的力学采集仪器主要为平膜盒式力学传感器, 除此之外, 还有配套的数字转换器以及数据处理软件等, 图4为整个系统的示意图.
图4
1.3 次声数据采集模块
次声数据采集模块包括刚性导波管、次声传感器、次声数据存储器以及相应的数据处理软件, 其中最核心的部件当属次声传感器. 本次实验所使用的次声传感器来自于中国科学院声学研究所研制的IDS2016型次声传感器, 该传感器具有体积小、灵敏度高、对机械振动不敏感、频响好的优点. 其中3 dB平稳带宽保持在0.5$\sim$200 Hz范围内, 灵敏度为50 mV/Pa, 在1$\sim$100 Hz频率范围内灵敏度曲线平直, 可以完全覆盖剪切过程中产生次声波的整个频段.
1.4 位移采集模块
针对传统的基于传感器的接触式测量方法来测量剪切位移, 存在仪器安装困难的现状, 故结合本研究的实际情况, 实验采用自行研发的非接触式光学测量方法结合数字图像识别技术来进行位移数据的采集.
测量的原理是通过计算物体位移变化前后呈现的两幅图像之间的相关性来计算位移值. 根据本实验的实际情况, 利用此测量方法时需要在上部剪切盒表面贴一张长方形白纸(白色与钢板的深色在二值化后会形成鲜明反差)作为定位标记, 然后使用数码摄像机录制整个剪切盒移动过程, 得到一串数字图像序列, 再利用计算机程序对每一副图像进行预处理, 包括图形矫正、二值化处理、选取特征像素行(特征像素行指, 图像序列中的所有图像中, 作为定位标记的像素数量都相等的那一行像素, 之所以直接取行像素作为计算量, 是因为在本次研究的实验中, 上部剪切盒只做水平直线运动)等步骤(流程如图5所示).
图5

图5
图像序列第1帧和第$n$帧的处理流程图
Fig.5
Processing flowchart of the first and $n$th frames of the image sequence
图像预处理的每一步需使用相同的变换参数. 显然, 预处理后的图像的特征像素行是一个一维二进制行向量(称为特征行向量). 如果将第一张图像的特征像素行右移(这里的移位为循环移位, 即移位后末位变首位), 每次右移后得到新的特征行向量序列, 将这一特征行向量序列依次与其他图像的特征行向量进行相关性计算(见图6), 每次计算后都会得到一组相关性系数, 在一组相关性系数中的每一个值都对应一个移位的像素数, 而移位的像素数又对应一个位移距离, 因此, 每一组相关性系数序列中的最大值对应的位移距离就是这幅图像中被测物体在当前时刻的位移值.
图6

由于位移数据的采集最初来自数码摄像机, 所以本测量方法的精度主要依赖于摄像机的分辨率. 本次研究采用的4K摄像机横向分辨率为3840个像素, 在白纸所在的焦距处整个屏幕所囊括的总距离在所有实验中平均约为1000 mm, 由此可以算得测量精度为每像素0.26 mm, 在之后的研究中可以采用更高分辨率的摄像机来提高测量精度. 整个流程可以通过Photoshop图像处理软件和Matlab编程实现.
2 实验材料
图7

图8


3 实验方案
3.1 实验流程
首先, 将野外取回的所有土样分批放入烘箱中, 以105${^\circ}$C的温度持续24 h鼓风干燥, 并将烘干后的土样研磨并过2 mm筛备用; 接下来, 按具体实验目的, 将变尺寸剪切仪的上部挡土板和下部挡土板固定在规定的位置, 采用分层压实的方法将处理好的土样堆填于剪切盒中; 然后, 在土样顶部插入刚性导波管, 在导波管顶部安装次声传感器探头, 将力学传感器放置在千斤顶与上部剪切盒之间, 将记录位移用的摄像头摆放在合适位置; 最后, 记录实验开始时间, 并打开数据采集软件, 在记录30 s背景噪音的基础上, 开始按压千斤顶为上部剪切盒加载直至土样剪切破坏.
3.2 分析方法研究
3.2.1 背景噪声分析与处理
在室内试验过程中, 会出现很多外在条件干扰的情况. 例如开、关门和抽风机运转时会导致空气不稳定流通, 实验用水所发出的超低频声等. 针对上述可控的低频声源, 本试验时间均选定在凌晨, 关闭与试验无直接关系的电器设备, 以减少外界带来的干扰. 在预处理的基础上, 考虑到本次研究中关注的重点是声波信号的次声部分, 所以需要对声波信号进行了低通滤波处理. 在文中利用巴特沃斯滤波器对信号进行处理, 设置通带截止频率为20 Hz, 阻带截止频率为25 Hz, 通带内最大衰减为0.5 dB, 阻带衰减为40 dB. 同时, 利用背景噪声强度较低的现状, 设置声压强度阈值为0.000 5 Pa, 最后, 对阈值处理后小波信号进行小波逆变换.
3.2.2 次声事件拾取
为了提取次声事件, 将整个时域按次声事件分段, 本文提出了一种按次声事件由计算机程序自动划分时域的方法. 首先根据每个采样点的信噪比初步判断该采样点是否位于一个次声事件的时段内, 再归并比较密集的有效采样点形成一个次声事件, 具体步骤如下.
第一步, 初步判断一个采样点是否位于一个次声事件的时段内.
根据离散声波信号的能量公式
其中, $E$表示信号能量; $s$表示声波通过的面积, 可以认为是常量; $\rho $表示声波传播介质的密度, 这里即指空气的密度; $v$表示音速; $I$表示采样点总数; $x(i)$表示第$i$个采样点的声压值, 可以得到单个采样点所代表的能量
根据功率的定义(单位时间内的能量), 本文定义离散声波信号中第$i$个采样点的功率为
本文对"均方功率"的定义由式(1)右侧去掉$s$, $\rho $和$v$再开方得到, 因为式中的$s$, $\rho$和$v$为常量, 所以去掉这3个量不影响信号点间的相对取值且避免了对它们的测量, 再开方的目的是为了使最后得到的值与声压值量纲相同.
由式(3)定义一个判据式
其中, $P_{j}$表示第$j$个采样点的功率, $P_{\max}$表示前30 s背景噪声的最大功率, $L$表示用于计算信噪比的时窗长度.
式(4)左侧的意义为以第$i$个采样点为中心的$L$时长范围内的信号能量, 右侧的意义为在长度同样为$L$的时段内噪声的最大能量, 整个式子表示将局部的信号能量与相同长度噪声能量进行比较. 针对新信号中的每一个点代入式(5)中判断, 结果为真时, 把该点标记为1, 否则标记为0, 这样就形成一个由0和1组成的序列, 称为第一轮标记序列, 其长度等于原始信号. 于是整个时域按信噪比被初步划分出来. 此时的划分是不够的, 因为第一轮标记序列中的1值点过于零碎, 需要将间隔很短的信号段再一次归并.
第二步, 对第一轮标记序列进行归并整合. 这一步会用到一个所有值均为1的行向量$r$作为参考向量, 把这个参考向量作为时窗在第一轮标记序列的时域中平移, 并与和时窗长度相同的局部按下式做计算
其中, $c_{i}$表示判别该采样点(第$i$个点)是否需要重新标记为1或0的值, $J$表示移动时窗的采样点序列总数, $s_{j}$表示第一轮标记序列中的第$j$个点, $\lceil \rceil$表示向上取整, $\lfloor \rfloor$表示向下取整.
由式(6)计算得到结果$c_{i}$后, 再判别是否需要重置采样点的声压值, 当$c_{i}>0$时, 说明第一轮标记序列中与时窗长度相同的局部向量与作为参考样本的向量相互匹配, 该点可以标记为1, 否则当$c_{i}<0$时应该标记为0. 最后再次得到一个基于时域的由若干0和1分别连续分布的新序列, 称为次声事件标记序列, 其中连续的1指明该时段内存在能量明显大于背景噪音的次声信号, 而连续的0指明该时段内不存在有效的次声信号.
式(5)中的时窗长度$L$和式(6)中时窗长度$J$是两个对最终划分结果影响较大的计算因子. 其中$L$应设置一个较小值, 若设置值过大, 一些能量较小的次声事件将不会被识别出. 而时窗长度$J$影响最终次声事件划分出来的数量, 若$J$取值过小, 次声事件会划分的过密, 无疑会增加后期分析的工作量, 而$J$若取值过大, 对次声事件的划分又太过于简单, 一些间隔很远的有效信号也被归并为一个次声事件. 经过反复实验, 本文认为$L=5$, $J=100$是合适的. 最后根据式(5)和式(6), 使用MATLAB编制了对信号按次声事件自动划分时域的程序.
4 试验结果分析
4.1 应变软化类黏性土的渐进性破坏过程
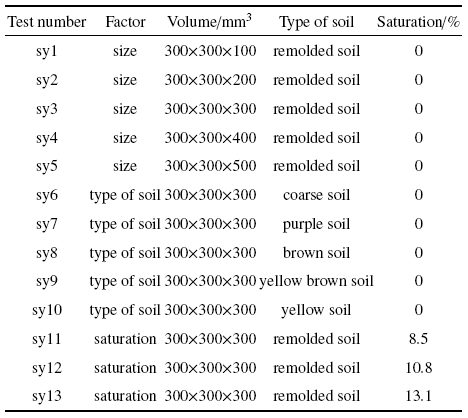
图9

图9
"推力-时间"曲线和声波信号时域图
Fig.9
"Thrust-time" curve and time domain diagram of acoustic signal
图10

人工加载对剪切速度的影响可以认为是微乎其微的, 在本实验中推力与剪切带受到的剪力几乎相等, 由牛顿第二定律
其中, $f$是土体受到的剪力, 单位kN; $F$是千斤顶的推力, 单位kN; $m$是土体上半部分质量, 实测sy3的土体总质量49.24 kg; $a$为位移加速度, 单位为m/s$^{2}$. 经计算$ma$的值在$-$0.046 6到0.049 9之间, 远远小于推力大小, 因此可大致认为在千斤顶加载的过程中上部剪切盒保持匀速运动.
同时, 推力的趋势线随位移变化呈现升高后降低的规律, 当sy3发生剪切破坏时, 首先在某一点处超过抗剪强度而发生破裂, 然后从此破裂点开始向整个剪切面蔓延扩展, 随着剪切面的蔓延扩展, 整个土体的抗剪强度也在降低, 应变局部化现象增强, 直至整个剪切面贯通, 整体表现出明显的应变软化特性.
4.2 剪切过程的次声响应
根据渐进破坏理论和推力趋势线的形态, 本文将其划分为了弹性变形阶段、弹塑性变形阶段以及峰值后的应变软化阶段3个阶段. 为了探究与声学信号的关系, 将推力-位移曲线在时域上重新描述, 绘制出的"推力-时间"曲线图, 以sy3为例(见图11), 推力趋势线在经过前30 s的背景噪音录制阶段后随时间逐渐增大, 加载后先是呈直线状态增大, 处于弹性变形阶段; 在74 s后曲线斜率开始减小, 曲线本身呈向下弯曲状, 处于弹塑性变形阶段; 在118 s处推力趋势线达到峰值6.1 kN后开始减少, 随后随着时间推移逐渐减小, 对应着应变软化阶段.
图11

sy3在次声事件拾取的基础上获取了26个次声事件(见图11), 将每个事件对应的次声信号均方功率峰值用虚线连接起来形成均方功率的包络线, 随着时间推移包络线开始逐渐上升, 在105 s处均方功率达到0.047 9 Pa后开始下降, 之后偶有起伏但都没有超过105 s处的峰值, 并且很明显的, 该包络线的时域形态与推力趋势线较为相似.
从图11来看, 剪切试验过程中的时域信号在105 s处能量达到了峰值, 同时应力曲线也达到峰值,实际上从现场结果来看试样在达到应力峰值时已经破坏, 但此时应力并没有大幅度下降, 表明土样还有一定残余强度. 破坏过程中的次声信号强度比破裂后剪切面滑移所产生的次声信号强度大, 说明土样内部裂隙发展所产生的次声信号与土样颗粒摩擦所产生的次声信号有一定的区别.
表3 各组实验次声事件次数与时间差计算结果
Table 3
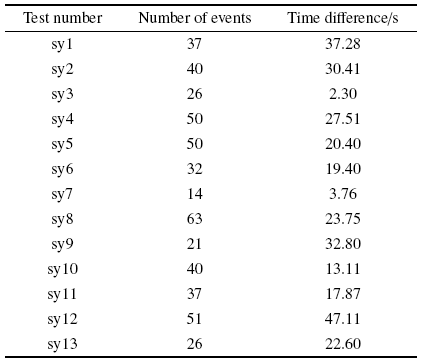 |
图12

图13
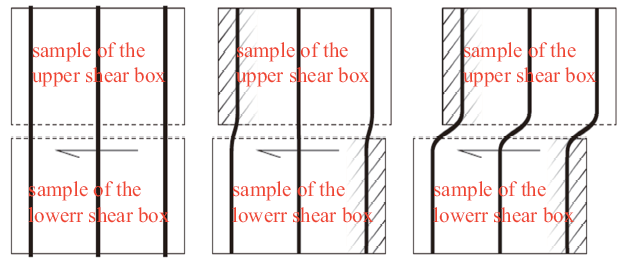
图13
剪切过程示意图(阴影区域表示压密区, 1#、2#和3#三根粗直线表示铝丝, 用于表征土样平行于剪切方向的截面的形变)
Fig.13
Schematic diagram of the cutting process
在剪切过程初期, 土体整体变形以上部试样中压密区土体的弹性变形为主, 剪切带中的剪切变形为辅, 因此推力趋势线呈近直线状, 在此阶段, 土颗粒主要发生弹性变形, 颗粒间接触面相互挤压产生的声波能量较小, 但随着剪切过程的发展, 土体整体变形进入到以剪切带塑性变形为主的阶段, 此阶段中主要以黏土胶体团粒本身的变形为主, 这种胶体团粒的变形比弹性变形所产生的声波能量要大, 从以土颗粒弹性变形为主到黏土团粒本身变形为主, 后者产生的声波信号成分也逐渐超过前者, 所以在宏观上表现为弹塑性阶段次声信号幅度值比弹性阶段更大(见图14), 均方功率峰值一般也发生在此阶段. 在推力峰值时, 土体剪切面开始渐进性破坏, 并进入到应变软化阶段, 在此阶段剪切面从某一点发生破裂并逐步蔓延到整个剪切面, 此时剪切带的运动形式在微观上发展成以黏土团粒拉张破裂后土颗粒间的摩擦为主, 黏土团粒的破裂为辅, 此时的信号能量也逐渐减弱, 偶尔局部团粒破裂活动较为集中时, 在时域信号上还会产生相应的脉冲, 但包含此脉冲的次声事件的幅值一般不会再超过弹性阶段的幅值.
图14

5 结论
(1)针对常规土体应变式直剪仪用于声发射实验时声学信号微弱的缺陷, 研发了专门用于探测次声信号的变尺寸直剪仪, 设计了非接触式位移数据的自动采集模块, 搭建了一套大尺寸土体直剪实验力-声-位移联合采集系统, 为土质滑坡次声监测技术室内实验研究奠定了基础.
(2)将声学信号结合力学和位移数据进行分析, 发现次声信号在时域上的脉冲形态与直剪实验中的"推力-时间"曲线具有明显的相关性, 并在应变软化类黏性土直剪过程中剪切带的渐进性破坏理论的基础上, 分析了剪切过程中弹性阶段、弹塑性阶段和应变软化阶段的微观声学响应, 认为黏性土剪切破坏时发出的次声信号主要来源于弹性阶段中黏土颗粒的相互挤压、弹塑性阶段和应变软化阶段中由黏土颗粒构成的胶体团粒本身的变形以及黏土胶体团粒拉张破裂后包含其中的土颗粒间的相互摩擦三种形式.
(3)在土剪不同阶段, 次声信号的幅值大小呈现出应变软化阶段$<$弹性阶段$<$弹塑性阶段的规律, 同时, 次声信号的均方功率峰值都在推力峰值之前, 平均提前为22.95 s, 这说明将次声技术作为土质滑坡预警手段的具有理论可行性.
本研究对于土质边坡的动态监测和稳定性预测都具有重要的指导意义, 可为进一步基于次声的土质滑坡预警模型研究提供一定的理论参考.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}