引言
地基上加肋板是工程中一种常见的结构, 如建筑物筏形基础、混凝土刚性路面板、飞行跑道等. 这类板壳结构通常受均布、移动、集中等载荷作用,尤其是在不均匀载荷的长期影响下结构易发生倾斜、变形、开裂等, 造成严重的安全隐患和经济损失. 因此在设计阶段通过优化肋梁布置来调整加肋板的局部刚度, 有针对性地适应载荷的局部不均匀性, 可充分发挥弹性地基加肋板的力学性能, 达到控制不均匀变形的目的.
目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计.
无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中.
由以上分析可知, 多数研究都集中在平板或加肋板的弯曲、动力响应等方面, 而对于弹性地基加肋板肋条位置的优化问题鲜见相关文献. 本文则通过无网格伽辽金法并结合遗传算法, 根据实际需要(载荷情况等)优化弹性地基加肋板的肋条位置, 增大局部刚度, 以减小局部变形. 首先利用无网格的优势, 基于一阶剪切变形理论和移动最小二乘近似原理, 建立了一个弹性地基加肋板的无网格模型计算弹性地基加肋板的弯曲问题, 并实现肋条任意角度布置; 其次将遗传算法引入结构的优化设计中, 针对肋条的布置进行位置优化计算; 最后以不同参数、载荷布置形式的弹性地基加肋板的肋条最佳布置位置进行分析求解, 将本文解与ABAQUS有限元解及文献结果进行比较分析. 研究表明, 该方法能有效地分析弹性地基加肋板肋梁位置优化问题, 在肋条位置改变时, 不需要重新划分网格, 具有一定的工程实际应用价值. 此外,本文方法将来还可以针对不同的地基参数(不均匀地基)对肋条位置进行优化.
1 基于遗传算法的弹性地基加肋板肋条无网格优化列式
1.1 无网格力学模型
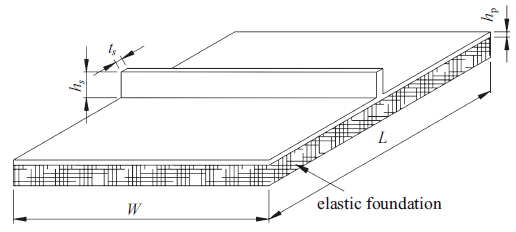
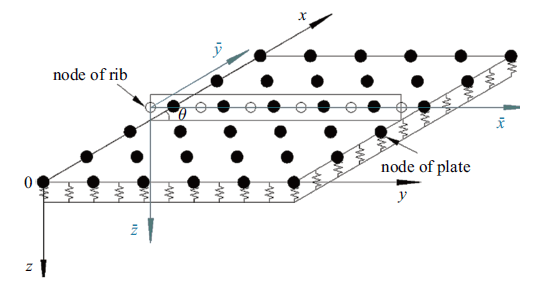
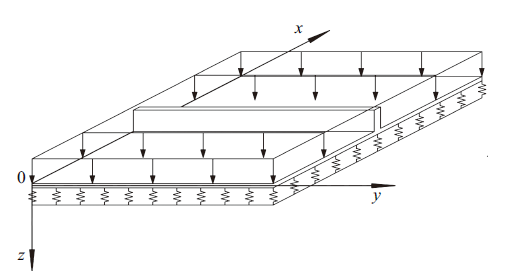
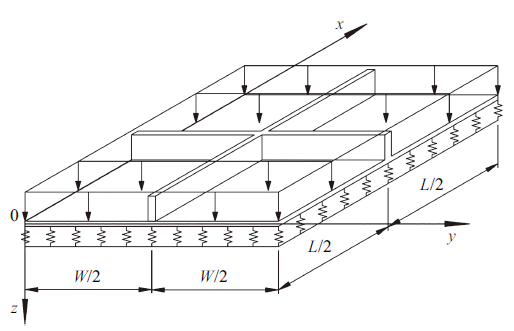
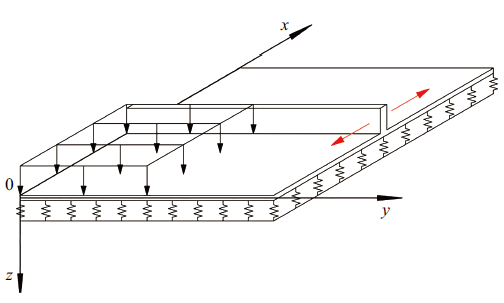
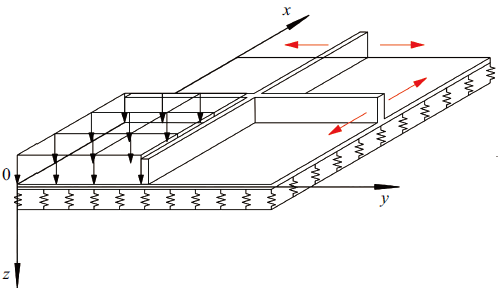
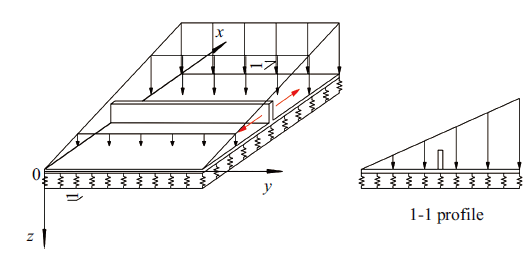
弹性地基加肋板如图1 所示, 假设其材质均匀, 弹性模量、泊松比、板厚、肋条高、肋条厚度、板宽及板长分别为$E$, $\mu$, $h_{\rm p}$, $h_{\rm s}$, $t_{\rm s}$, $W$, $L$, 并以弹簧模拟弹性地基(弹簧一端与加肋板节点连接, 另一端固接). 平板及肋条均用一系列点来离散, 分别采用各自的坐标系建立无网格力学模型(图2 ), 两个坐标系之间的关系如下
(1) $ \begin{eqnarray} \label{eq1} \left. \begin{array}{l} x=\bar{{x}}\cos \theta +x_0 \\ y=\bar{{x}}\sin \theta +y_0 \\ \end{array} \right\} \end{eqnarray}$
式中($x_{0}$, $y_{0})$为肋条坐标系原点在平板整体坐标系中的坐标.
图 1
图 1
弹性地基加肋板
Fig. 1
Ribbed plate on elastic foundation
图 2
图 2
无网格模型
Fig. 2
Meshfree model
1.2 平板及肋条的位移场
基于上述的无网格力学模型, 记平板和肋条的节点总数分别为$n$和$m$, 在各自的坐标系中求出其位移场如下.
由移动最小二乘近似[39 ] 求出平板第$I$个节点的形函数
(2) $ \begin{eqnarray} \label{eq2} H_I (x,y)=q^{\rm T}(x,y)B^{-1}(x,y)q(x_I ,y_I )\overline \omega (x-x_I ,y-y_I ) \end{eqnarray}$
式中, $B(x,y)=\sum \limits_{I=1}^n {\overline \omega (x-x_I ,y-y_I)q(x_I ,y_I )q^{\rm T}(x,y)}$ $q^{\rm T}(x,y)=[1,x,y,x^2,y^2,xy,y^2]$为二维空间单项式基函数. 肋条的形函数与此类似, 但取一维空间单项式基函数$q^{\rm T}(x)=[1,x,x^2]$, $\overline \omega $为权函数
\begin{eqnarray*} \overline \omega (r)=\left\{ \begin{array}{l@{\ \ }l} 2 / 3-4r^2+4r^3, & r\leqslant 1 / 2 \\ 4 / 3-4r+4r^2-{4r^3} / 3, &1 / 2<r\leqslant 1 \\ 0, &r>1 \end{array} \right. \end{eqnarray*}
平板节点自由度包括$u_{o\rm p}$, $v_{o\rm p}$, $w_{\rm p}$, $\varphi_{{\rm p}x}$, $\varphi_{{\rm p}y}$, 其中$u_{o\rm p}$, $v_{o\rm p}$, $w_{\rm p}$分别表示节点沿$x$, $y$, $z$方向的平动位移, $\varphi_{{\rm p}x}$, $\varphi_{{\rm p}y}$分别表示节点绕$y$, $x$轴的转角. 基于一阶剪切变形理论[40 ] , 将平板位移场表示为
(3) $ \begin{eqnarray} \left.\begin{array}{l} u_{\rm p} (x,y,z,t)=u_{\rm 0p} (x,y,t)-z\varphi_{{\rm p}x} (x,y,t)= \\ \sum \limits_{I=1}^n {H_I (x,y)u_{0{\rm p}I} (t)} -z\sum \limits_{I=1}^n {H_I (x,y)\varphi _{{\rm p}xI} (t)} \\ v_{\rm p} (x,y,z,t)=v_{\rm 0p} (x,y,t)-z\varphi _{{\rm p}y} (x,y,t) = \\ \sum \limits_{I=1}^n {H_I (x,y)v_{0{\rm p}I} } (t)-z\sum \limits_{I=1}^n {H_I (x,y)\varphi _{{\rm p}yI} (t)} \\ w_{\rm p} (x,y,z,t)=w_{\rm p} (x,y,t)=\sum \limits_{I=1}^n {H_I (x,y)w_{{\rm p}I} (t)} \end{array} \right\} \end{eqnarray}$
式中, $\{u_{0{\rm p}I} (t),v_{0{\rm p}I} (t),w_{{\rm p}I} (t),\varphi _{{\rm p}xI} (t),\varphi_{{\rm p}yI} (t)\}^{\rm T}={\Delta }_{{\rm p}I}$为平板节点$I$的节点参数, $\varphi_{{\rm p}x}$, $\varphi _{{\rm p}y}$, $w_{\rm p} $三者相互独立, 将式(3)写成矩阵形式
(4) $ \begin{eqnarray} \label{eq4} {U}_{\rm p} =\left\{ {\begin{array}{l} u_{\rm p} \\ v_{\rm p} \\ w_{\rm p} \\ \end{array}} \right\}=\sum \limits_{I=1}^n {{N}_I {\Delta }_{{\rm p}I} } \end{eqnarray}$
式中, ${N}_I =\left[ {{\begin{array}{c@{\ \ }c@{\ \ }c@{\ \ }c@{\ \ }c} {H_I } & 0 & 0 & {-zH_I } & 0 \\ 0 & {H_I } & 0 & 0 & {-zH_I } \\ 0 & 0 & {H_I } & 0 & 0 \end{array} }} \right]$
以梁格模拟肋条, 其节点自由度包括$u_{\rm 0s}$, $w_{\rm s} $, $\varphi _{\rm s} $, 其中$u_{\rm 0s} $和$w_{\rm s}$分别表示肋条节点沿肋条纵向轴线、$\bar{{z}}$方向的平动位移, $\varphi _{\rm s} $表示节点绕肋条横向轴线的转角, 同理可导出肋条位移场
(5) $ \begin{eqnarray} \label{eq5} \left. \begin{array}{l} u_{\rm s} (\bar{{x}},\bar{{z}},t)=u_{\rm 0s} (\bar{{x}},t)-\bar{z}\varphi _{\rm s} (\bar{{x}},t)=\\ \quad \sum \limits_{I=1}^m {\varPhi _I (\bar{{x}})u_{0{\rm s}I} (\bar{{x}},t)} -\bar{z}\sum \limits_{I=1}^m {\varPhi _I (\bar{{x}})\varphi _{{\rm s}I} (t)} \\ w_{\rm s} (\bar{{x}},t)=\sum \limits_{I=1}^m {\varPhi _I (\bar{{x}})w_{{\rm s}I} (t)} \\ \end{array} \right\} \end{eqnarray}$
式中, $\{u_{0{\rm s}I} (t),w _{{\rm s}I} (t),\varphi _{{\rm s}I}(t)\}^{\rm T}={\Delta }_{{\rm s}I} $为肋条第$I$个节点的位移参数, 肋条形函数$\varPhi_I (\bar{{x}})$的计算方法与平板类似. 将式(5)写成矩阵形式
(6) $ \begin{eqnarray} \label{eq6} {U}_{\rm s} =\left\{ {{\begin{array}{*{20}c} {u_{\rm s} } \\ {w_{\rm s} } \\ \end{array} }} \right\}=\sum \limits_{I=1}^m {\left[ {{\begin{array}{*{20}c} {{\varPhi }_{\rm I} (\bar{{x}})} & 0 & {-\bar{z}{\varPhi }_{\rm I} (\bar{{x}})} \\ 0 & {{\varPhi }_{\rm I} (\bar{{x}})} & 0 \\ \end{array} }} \right]} \left[ {{\begin{array}{*{20}c} {u_{{\rm 0s}I} (t)} \\ {w_{{\rm s}I} (t)} \\ {\varphi _{{\rm s}I} (t)} \\ \end{array} }} \right] \end{eqnarray}$
1.3 平板的势能
由平板位移场可求出任意点($x,y)$的线应变及切应变为
(7) $ \begin{eqnarray} \label{eq7} &&{\kappa }_{\rm p} =\left[ {{\begin{array}{*{20}c} {\varepsilon _x } \\ {\varepsilon _y } \\ {\gamma _{xy} } \\ \end{array} }} \right]=\sum \limits_{I=1}^n {{B}_{\kappa I} {\Delta }_{{\rm p}I} } \end{eqnarray}$
(8) $ \begin{eqnarray} \label{eq8} {\gamma }_{\rm p} =\left[ {{\begin{array}{*{20}c} {\gamma _{xz} } \\ {\gamma _{yz} } \\ \end{array} }} \right]=\sum \limits_{I=1}^n {{B}_{\gamma I} {\Delta }_{{\rm p}I} } \end{eqnarray}$
\begin{eqnarray*} &&{B}_{\kappa I} =\left[ {{\begin{array}{c@{\quad }c@{\quad }c@{\quad }c@{\quad }c} {H_{I,x} } & 0 & 0 & {-zH_{I,x} } & 0 \\ 0 & {H_{I,y} } & 0 & 0 & {-zH_{I,y} } \\ {H_{I,y} } & {H_{I,x} } & 0 & {-zH_{I,y} } & {-zH_{I,x} } \\ \end{array} }} \right] \\&& {B}_{\gamma I} =\left[ {{\begin{array}{c@{\quad }c@{\quad }c@{\quad }c@{\quad }c} 0 & 0 & {H_{I,x} } & {-H_I } & 0 \\ 0 & 0 & {H_{I,y} } & 0 & {-H_I } \\ \end{array} }} \right] \end{eqnarray*}
(9) $ \Pi _{\rm p} =\frac{1}{2}{\Delta }_{\rm p}^{\rm T} {K}_{\rm p} {\Delta }_{\rm p} $
式中, ${\Delta }_{p} =\{{\Delta }_{p1}\ \ {\Delta }_{p2}\ \ ... \ \ {\Delta }_{pn} \}^{\rm T}$, $[{K}_{p} ]_{IJ} =\iiint_{-{h_{\rm p}}/{2}}^{{h_{\rm p} }/{2}} {{B}_{\kappa I}^{\rm T} } {D B}_{\kappa J} \mbox{d}z\mbox{d}x\mbox{d}y+({h_{\rm p} }/{\alpha })\iint {{B}_{\gamma I}^{\rm T} }{A}_{\rm s} {B}_{\gamma J} \mbox{d}x\mbox{d}y$, $\alpha ={5}/{6}$为剪切修正系数[40 ] , ${A}_{\rm s} =\left[\begin{array}{l@{\quad }l} G&0 \\ 0&G \\ \end{array} \right]$, $G=\dfrac{E}{2(1+\mu )}$, $D=\dfrac{E}{1-\mu ^2}\left[ {{\begin{array}{c@{\quad }c@{\quad }c} 1 & \mu & 0 \\ \mu & 1 & 0 \\ 0 & 0 & (1-\mu)/2 \\ \end{array} }} \right].$
1.4 肋条的势能
由肋条的位移场可以求出任意点($\bar{{x}}$, $\bar{{y}})$ 的线应变及切应变:
(10) $ \begin{eqnarray} \label{eq9} &&\kappa _{\rm s} =\varepsilon _{\rm s} =\sum \limits_{I=1}^m {{B}_{\kappa {\rm s}I} {\Delta }_{{\rm s}I} } \end{eqnarray}$
(11) $ \begin{eqnarray} \label{eq10} \gamma _{\rm s} =\gamma _{\rm z} =\sum \limits_{I=1}^m {{B}_{\gamma {\rm s}I} {\Delta }_{{\rm s}I} } \end{eqnarray}$
式中, ${B}_{\kappa {\rm s}I} =\left[ {{\varPhi }_{I,\bar{{x}}}\ \ 0\ \ -\bar{z}{\varPhi }_{I,\bar{{x}}} } \right]$, ${B}_{\gamma {\rm s}I} =\left[ 0\ \ \varPhi_{I,\bar{{x}}}\ \ -\varPhi_I \right]$.
(12) $ \begin{eqnarray} \label{eq12} \Pi _{\rm s} =\frac{1}{2}{\Delta }_{\rm s}^{\rm T} {K}_{\rm s} {\Delta }_{\rm s} \end{eqnarray}$
其中, ${\Delta }_{\rm s} =\{{\Delta }_{{\rm s}1}\ \ {\Delta }_{{\rm s}2}\ \ ... \ \ {\Delta }_{{\rm s}m} \}^{\rm T}$, $[{K}_{\rm s} ]_{IJ} =\int_{-{h_{\rm s}}/{2}}^{{h_{\rm s}}/{2}} {\int {E{B}_{\kappa {\rm s}I}^{\rm T} {B}_{\kappa {\rm s}J} t_{\rm s} \mbox{d}\bar{{z}}\mbox{d}\bar{{x}}}+\int {({GA_{\rm s} }/{\alpha })} } {B}_{\gamma {\rm s}I}^{\rm T} {B}_{\gamma {\rm s}J} \mbox{d}\bar{{x}}$, $t_{\rm s} $和$A_{\rm s} $ 分别为肋条截面厚度和面积.
1.5 弹性地基与加肋板的接触势能
假定弹性地基与加肋板紧密接触则两者的位移满足连续条件, 设基床反力系数$\xi$, 则接触力势能可表示为
(13) $ \begin{eqnarray} \label{eq13} \Pi _{\rm p} =\frac{1}{2}{\Delta }_{\rm p}^{\rm T} {K}_\xi {\Delta }_{\rm p} \end{eqnarray}$
式中, $\left[ {{K}_\xi } \right]_{IJ} =\iint {{N}_I^{\rm T} T_\xi {N}_J \mbox{d}x\mbox{d}y}$, $T_\xi =\left[ {\begin{array}{ccc} 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & \xi \\ \end{array}} \right]$.
1.6 总势能
将各势能进行叠加可求出整个加肋板的势能见式(14), 其中$k$为肋条数量.
(14) $ \begin{eqnarray} \label{eq14} \Pi =\frac{1}{2}{\Delta }_{\rm p}^{\rm T} {K}_{\rm p} {\Delta }_{\rm p} +\sum \limits_{i=1}^{k} {\frac{1}{2}{\Delta }_{{\rm s}i}^{\rm T} {K}_{{\rm s}i} {\Delta }_{{\rm s}i} +\frac{1}{2}{\Delta }_{\rm p}^{\rm T} {K}_\xi {\Delta }_{\rm p} } \end{eqnarray}$
式中${\Delta }_{\rm p} $和${\Delta }_{{\rm s}i}$分别代表平板、第$i$个肋条的位移,需通过两者的位移协调来建立其关系式, 如下.
1.7 平板与肋条的位移协调方程
如图3 所示, 肋条上的一节点$S$必能在板面上找到与其相应的一点$P$ ($P$点不一定是板节点), 肋条节点与板节点之间的位移关系如下
(15) $ \begin{eqnarray} \label{eq15} &&\left[ {w_{\rm p} } \right]_{\rm p} =\left[ {w_{\rm s} } \right]_{\rm s} \end{eqnarray}$
(16) $ \begin{eqnarray} \label{eq16} \left[ {u_{\rm p} } \right]_{\rm c} \cos \theta +\left[ {v_{\rm p} } \right]_{\rm c} \sin \theta =\left[ {u_{\rm s} } \right]_{\rm c} \end{eqnarray}$
(17) $ \begin{eqnarray} \label{eq17} \left[ {\varphi _{{\rm p}x} } \right]_{\rm p} \cos \theta +\left[ {\varphi _{{\rm p}y} } \right]_{\rm p} \sin \theta =\left[ {\varphi _{{\rm s}} } \right]_{\rm s} \end{eqnarray}$
图 3
图 3
位移协调示意图
Fig. 3
Indication of displacement coordination
肋条上有$m$个节点, 分别对应板上不同的节点, 故有$m$个类似式(15) ~式(17)的关系式
(18) $ \begin{eqnarray}w_{\rm p} (x_i ,y_i)=w_{\rm s} (\bar{{x}}_i ),\ \ i=1,2,\ldots,m \end{eqnarray}$
(19) $ u_{\rm p} \left(x_i ,y_i ,-\frac{h_{\rm p} }{2}\right)\cos \theta +v_{\rm p} \left(x_i ,y_i ,-\frac{h_{\rm p} }{2}\right)\sin \theta =\\ u_{\rm s} \left(\bar{{x}}_i ,\frac{h_{\rm s} }{2}\right), \ \ i=1,2, \ldots,m $
(20) $ \varphi_{{\rm p}x} (x_i, y_i )\cos \theta +\varphi _{{\rm p}y} (x_i ,y_i )\sin \theta =\varphi _{{\rm s}}(\bar{{x}}_i),\\ i=1,2, \ldots,m $
根据一阶剪切理论及移动最小二乘近似, 由式(18) ~式(20)可导出
(21) $ \begin{eqnarray} \label{eq21} {T}_{\rm p} {\Delta }_{\rm pw} ={T}_{\rm s} {\Delta }_{\rm sw} \end{eqnarray}$
(22) $ \label{eq22} {T}_{\rm p} ({\Delta }_{\rm pu} \cos \theta +{\Delta }_{\rm pv} \sin \theta +e{\Delta }_{{\rm p}\varphi x} \cos \theta + e{\Delta }_{{\rm p}\varphi y} \sin \theta )={T}_{\rm s} {\Delta }_{\rm su} $
(22) $ \begin{eqnarray} \label{eq23} {T}_{\rm p} ({\Delta }_{{\rm p}\varphi x} \cos \theta +{\Delta }_{{\rm p}\varphi y} \sin \theta )={T}_{\rm s} {\Delta }_{{\rm s}\varphi} \end{eqnarray}$
\begin{eqnarray*} &&{\Delta }_{\rm sw} =\{ {{\begin{array}{cccc} {w_{{\rm s}1}} & {w_{{\rm s}2}} & \ldots & {w_{{\rm s}m}} \end{array}}}\}^{\rm T}, {\Delta }_{\rm su} =\{ {{\begin{array}{cccc} {u_{0{\rm s}1}} & {u_{0{\rm s}2}} & \ldots & {u_{0{\rm s}m}} \\ \end{array}}}\}^{\rm T} \\&& {\Delta }_{{\rm s}\varphi} =\{ {{\begin{array}{cccc} {\varphi _{{\rm s}1}} & {\varphi _{{\rm s}2}} & \ldots & {\varphi _{{\rm s} m}} \\ \end{array}}}\}^{\rm T}, {\Delta }_{\rm pw} =\{ {{\begin{array}{cccc} {w_{{\rm p}1}} & {w_{{\rm p}2}} & \ldots & {w_{{\rm p}n}} \\ \end{array}}}\}^{\rm T} \\&& {\Delta }_{\rm pu} =\{ {{\begin{array}{cccc} {u_{0{\rm p}1}} & {u_{0{\rm p}2}} & \ldots & {u_{0{\rm p}n}} \\ \end{array}}}\}^{\rm T}, {\Delta }_{\rm pv} =\{ {{\begin{array}{cccc} {v_{0{\rm p}1}} & {v_{0{\rm p}2}} & \ldots & {v_{0{\rm p}n}} \\ \end{array}}}\}^{\rm T} \\&& {\Delta }_{{\rm p}\varphi x} =\{ {{\begin{array}{cccc} {\varphi _{{\rm p}x1}} & {\varphi _{{\rm p}x2}} & \ldots & {\varphi _{{\rm p}xn}} \\ \end{array}}}\}^{\rm T}, {\Delta }_{{\rm p}\varphi y} =\{ {{\begin{array}{cccc} {\varphi _{{\rm p}y1}} & {\varphi _{{\rm p}y2}} & \ldots & {\varphi _{{\rm p}yn}} \\ \end{array}}}\}^{\rm T} \\&& {T}_{\rm p} =\left[ {{\begin{array}{*{20}c} {H_1 \left( {x_1 ,y_1 } \right)} & {H_2 \left( {x_1 ,y_1 } \right)} & \cdots & {H_n \left( {x_1 ,y_1 } \right)} \\ {H_1 \left( {x_2 ,y_2 } \right)} & {H_2 \left( {x_2 ,y_2 } \right)} & \cdots & {H_n \left( {x_2 ,y_2 } \right)} \\ \vdots & \vdots & & \vdots \\ {H_1 \left( {x_m ,y_m } \right)} & {H_2 \left( {x_m ,y_m } \right)} & \cdots & {H_n \left( {x_m ,y_m } \right)} \\ \end{array} }} \right] \\&& {T}_{\rm s}=\left[ {{\begin{array}{*{20}c} {\varPhi _1 \left( {\bar{{x}}_1 } \right)} & {\varPhi _2 \left( {\bar{{x}}_1 } \right)} & \cdots & {\varPhi _m \left( {\bar{{x}}_1 } \right)} \\ {\varPhi _1 \left( {\bar{{x}}_2 } \right)} & {\varPhi _2 \left( {\bar{{x}}_2 } \right)} & \cdots & {\varPhi _m \left( {\bar{{x}}_2 } \right)} \\ \vdots & \vdots & & \vdots \\ {\varPhi _1 \left( {\bar{{x}}_m } \right)} & {\varPhi _2 \left( {\bar{{x}}_m } \right)} & \cdots & {\varPhi _m \left( {\bar{{x}}_m } \right)} \\ \end{array} }} \right] \end{eqnarray*}
其中, $e=({h_{\rm p} +h_{\rm s} })/{2}$为同心肋条(肋条中轴线与与平板中面重合)时, $e$为零. 由此可导出肋条节点参数与板节点参数的转换方程
(24) $ \begin{eqnarray} \label{eq24} {\Delta }_{\rm s} ={T}_{\rm sp} {R\Delta }_{\rm p} \end{eqnarray}$
式中, $ {T}_{\rm sp}$为${T}_{\rm s} ^{-1}{T}_{\rm p}$组装而成的矩阵.
\begin{eqnarray*} &&{R}=\left[ {{\begin{array}{*{20}c} {Q} & & 0 \\ & \ddots & \\ 0 & & {Q} \\ \end{array} }} \right] \\&&{\Delta }_{\rm s}\! =\!\left\{ {{\begin{array}{*{20}c} {u_{0{\rm s}1} } & {w_{{\rm s}1} } & {\varphi _{{\rm s}1} } & \ldots & {u_{0{\rm s}m} } & {w_{{\rm s}m} } & {\varphi_{{\rm s}m} } \\ \end{array} }} \right\}^{\rm T} \\&& {\Delta }_{\rm p}=\left\{ {{\begin{array}{*{20}c} {u_{0{\rm p}1} } & {v_{0{\rm p}1} } & {w_{\rm p1} } & {\varphi _{{\rm p}x1} } & {\varphi _{{\rm p}y1} } &\! \ldots \! & {u_{0{\rm p}n} } & {v_{0{\rm p}n} } & {w_{pn} } & {\varphi_{{\rm p}xn} } & {\varphi_{{\rm p}yn} } \\ \end{array} }} \right\}^{\rm T} \\&& {Q}=\left[ {{\begin{array}{c@{\ \ \ }c@{\ \ \ }c@{\ \ \ }c@{\ \ \ }c} {\cos \theta } & {\sin \theta } & 0 & {e\cos \theta } & {e\sin \theta } \\ 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & {\cos \theta } & {\sin \theta } \\ \end{array} }} \right] \end{eqnarray*}
其中, ${R}$为$3n\times 5n$的矩阵, 与角度$\theta $有关, ${T}_{\rm sp} $为$3m\times 3n$的矩阵, 与${T}_{\rm s} $及${T}_{\rm p} $有关, 若肋条改变位置时只需重新计算矩阵${T}_{\rm p} $. 因此, 可以任意改变肋条位置,而不需要重新分布板的结点. 记${T}={T}_{\rm sp} {R}$, 则式(24)可以写成
(25) $ \begin{eqnarray} \label{eq25} {\Delta }_{\rm s} ={T\Delta }_{\rm p} \end{eqnarray}$
因此, 通过位移协调关系所导出的式(25)可将肋条的所有节点参数转换成板的节点参数, 并实现肋条任意角度布置.
1.8 静力弯曲控制方程
加肋板受分布载荷$q(x,y)$作用时外力所做的功为式(26), 叠加载荷做的功及加肋板势能, 并通过2.7节所建立的转换方程可导出总能量泛函为
(26) $ \begin{eqnarray} \label{eq26} &&W=\iint {q\left( {x,y} \right)}w_{\rm p} {\rm d}x{\rm d}y \end{eqnarray}$
(27) $ \begin{eqnarray} \label{eq27} \Pi =\frac{1}{2}\delta _{\rm p}^{\rm T}K\delta _{\rm p} -\delta _{\rm p}^{\rm T}f \end{eqnarray}$
式中, ${K}={K}_{\rm p} +\sum \limits_{i=1}^k {{T}_i^{\rm T} {K}_{{\rm s}i} {T}_i } +{K}_\xi $
(28) $ \begin{eqnarray} \label{eq28} {K\Delta }_{\rm P} ={f} \end{eqnarray}$
此外, 本文采用完全转换法[41 ] 处理本质边界条件, 可求解弹性地基加肋板的静力弯曲问题.
1.9 基于遗传算法及改进混合遗传算法的肋条位置优化
基于遗传算法(GA)[34 ] 及改进混合遗传算法(HGA)对肋条位置进行优化, 在特定载荷作用下控制弹性地基加肋板中点的挠度. 本文的改进混合遗传算法是在遗传算法基础上引入模拟退火算法[36 ] , 利用Metropolis准则对个体进行选择操作, 辅以最优保存策略,并针对变异算子的特性采取自适应变异概率作变异运算, 效率相对较高. 优化运算的设计变量、目标函数及约束条件如下.
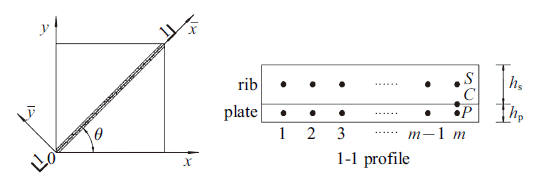
本文仅对平行于$x$, $y$轴的肋条(分别记为$x$向和$y$向肋条)作平行移动来优化肋条位置(图4 ), 设计变量为式(1)的$x_{0}$, $y_{0}$. 此外, 改变肋条倾角大小的优化将另文考虑.
图 4
图 4
肋条位置优化示意
Fig. 4
Optimization of rib position
以弹性地基上加肋板中点挠度(在工程中可根据实际需要选择控制点)最小值作为目标函数式(29), 在优化过程中肋条位置发生改变, 但地基板节点分布不改变, 故只需针对改变后肋条对应的板结点重新计算转换矩阵.
(29) $ \begin{eqnarray} \label{eq29} \min {w}=f(x,y),\ \ (x,y)\in \varOmega \end{eqnarray}$
式中, $x$, $y$为设计变量, $f(x, y)$为目标函数, $\varOmega $为可行域.
(30) $ \begin{eqnarray} \label{eq30} \left. \begin{array}{l} 0<x_0 <L \\ 0<y_0 <W \\ \end{array} \right\} \end{eqnarray}$
综上所述, 基于遗传算法的弹性地基加肋板肋梁无网格优化方法, 可以优化弹性地基加肋板肋条位置, 控制计算域内制定位置的挠度, 以下通过算例作进一步的分析.
2 算例分析
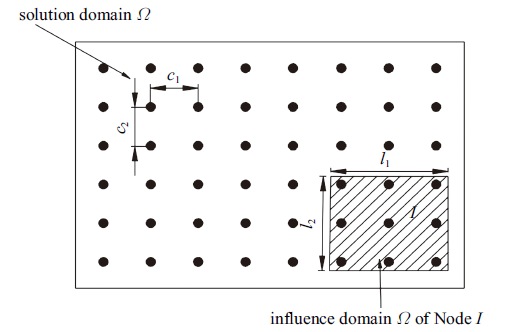
以不同参数、载荷条件的弹性地基加肋板为例, 通过C++编程计算分析静力弯曲及肋条位置优化问题, 并将本文解与FEM解(采用ABAQUS建模分析)、现有文献解进行对比. 如图5 所示, 以下算例均采用矩形影响域: $l_{1}=\lambda \times c_{1}$, $l_{2} =\lambda \times c_{2}$, $\lambda=4$ (肋条取$\lambda =2$). 有限元模型的单元类型均为S4R, 网格尺寸均为0.04 m $\times$ 0.04 m.
图 5
图 5
影响域
Fig. 5
Influence domain
2.1 收敛性分析
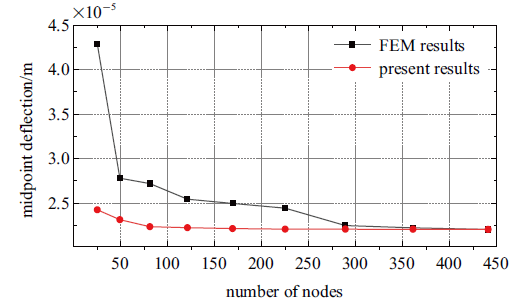
采用不同离散方案分析本文方法的收敛性. 一四边固支弹性地基加肋板(图6 ) $E=17$ MPa, $\mu=0.3$, $h_{\rm s}=0.1$ m, $h_{\rm p}$和$t_{\rm s}$均为0.01 m, $L=W=1$ m, $\xi =4.0\times10^{4}$ N/m$^{3}$, 受均布载荷作用$q=1$ N/m$^{2}$. 计算弹性地基加肋板中点挠度, 并与有限元进行对比, 结果见表1 及图7 . 研究表明, 节点数增加到$11\times 11$时本文结果趋于稳定, 认为该离散方案使计算收敛.
图 6
图 6
弹性地基加肋板受均布力
Fig. 6
Ribbed plate on elastic foundation subjected to uniform loads nephogram
图 7
图 7
收敛曲线
Fig. 7
Convergence curve
2.2 弹性地基加肋板弯曲分析
以矩形平板、垂直双肋条板及斜向交叉肋条板为例, 采用上述无网格方法对其进行弯曲分析, 具体如下.
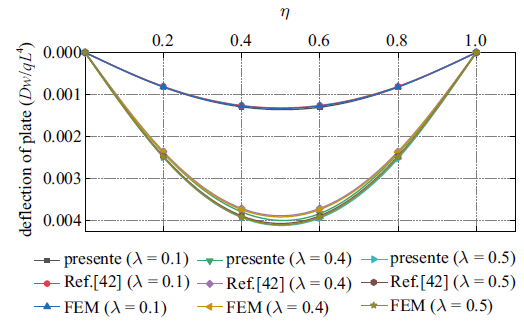
一四边简支平板$E=210$ GPa, $\mu =0.3$, $h_{\rm p}=0.01$ m, $W=L=1$ m, 受均布载荷$q$作用. 现采用$13\times 13$个均布节点对其进行离散计算挠度, 并与文献[42 ] 、有限元解对比, 结果见表2 及图8 . 计算表明, 本文解与现有文献解、有限元解非常接近, 相对误差均在工程允许范围内, 有效验证了本文方法的有效性.
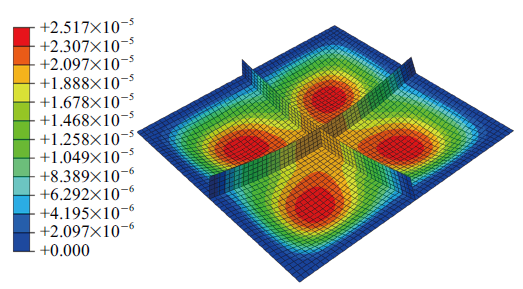
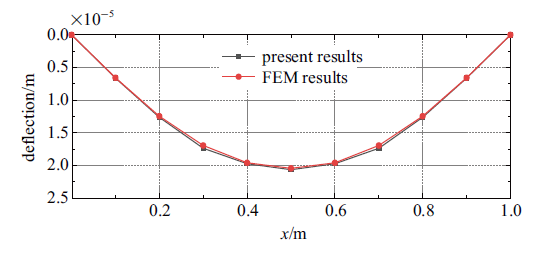
一四边固支均质垂直双肋条弹性地基加肋板如图9 所示, 两个肋条参数一致, $E=17$ MPa, $\mu=0.3$, $h_{\rm p}$和$t_{\rm s}$均为0.01 m, $h_{\rm s}=0.1$ m, $W=L=1$ m, $\xi =4.0\times 10^4$ N/m$^{3}$, 均布载荷大小为1 N/m$^{2}$. 无网格模型采用$13\times 13$个均布节点进行离散, 板的挠度计算结果见表3 , 有限元位移云图如图10 所示, 相应的结果对比如图11 所示.
图 8
图 8
本文方法与文献[42 ] 、FEM的对比
Fig. 8
Comparison of the presented method with Ref.[42 ] and FEM
图 9
图 9
弹性地基加肋板受力示意
Fig. 9
Ribbed plate on elastic foundation subjected to uniform loads
结果表明, 在求解弹性地基加肋板的弯曲问题时, 本文解和有限元解的相对误差都小于5%, 充分证明了本文方法的有效性和准确性.
图 10
图 10
位移云图
Fig. 10
The displacementnephogram
图 11
图 11
本文解与有FEM的对比
Fig. 11
Comparison of the presented method with FEM
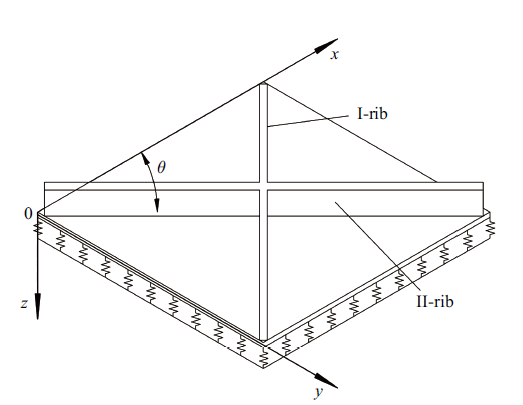
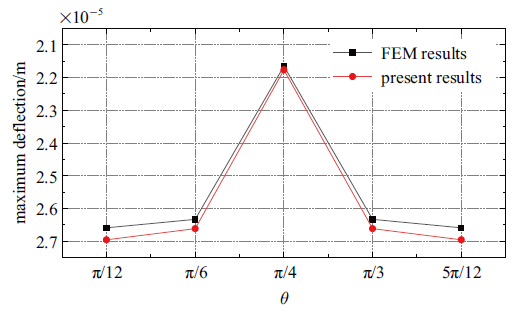
在2.2.2节算例的基础上将肋条斜向交叉布置, 两肋条分别记为肋条I、肋条II (图12 ), 其余参数不变, 改变肋条II与$x$轴方向的夹角$\theta$, 分别取${\pi}/{12}$, ${\pi}/{6}$, ${\pi}/{4}$, ${\pi}/{3}$, ${5\pi}/{12}$, 采用有限元计算加肋板的最大挠度, 并输出其对应点坐标, 再采用本文方法计算该点的挠度, 对比结果见表4 及图13 . 研究表明, 本文的无网格方法可以实现肋条在平板上按任意角度布置, 且可在保持计算结果满足所需精度的情况下保持地基板的离散方案不变, 只要重新计算位移转换矩阵$T_{\rm p}$, 省去了繁杂的网格重置工作, 可见其在肋条位置重分布的结构优化计算方面具有很大的优势.
图 12
图 12
弹性地基交叉肋条板受均布力
Fig. 12
Cross ribbed plate on elastic foundation under uniform loads
图 13
图 13
本文解与FEM的对比
Fig. 13
Comparison of the presented method with FEM
2.3 基于遗传算法及无网格法的弹性地基加肋板优化分析
以单肋条板及垂直双肋条板为例, 在局部载荷作用下采用基于遗传算法及无网格法优化肋条位置, 控制板中点挠度,具体如下.
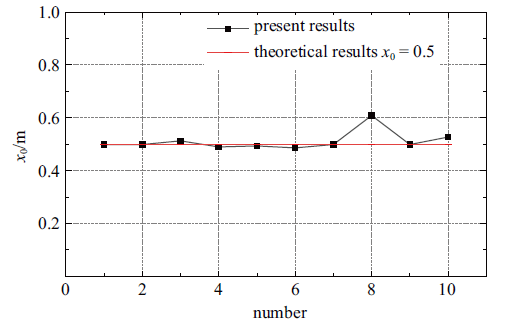
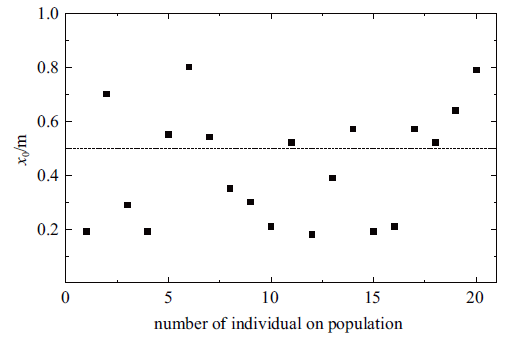
以2.1节垂直于板边的单肋条弹性地基板为例, 通过均匀载荷作用下的优化结果来验证本文方法的准确性(图14 ). 显然在均布载荷作用下肋条最优位置为地基板中心对称轴处, 即($x_{0}, y_{0})$为(0.5, 0). 现采用本文所述的方法进行十次优化分析:交叉概率$P_{\rm c}=0.4$、变异概率$P_{\rm m}=0.05$、遗传终止迭代的次数定为20、种群数选为20 (编号为1至20,下同), 结果见表5 和图15 .
图 14
图 14
单肋条弹性地基加肋板
Fig. 14
Single rib stiffened plate on the elastic foundation
结果表明: 所得结果的平均相对误差在5%以内, 验证了本文方法在分析弹性地基加肋板肋条位置优化问题上的准确性和有效性. 第8次计算结果误差相对较大(17.847 6%)的主要原因是: 遗传算法在迭代过程中, 有时会出现陷入局部最优解而忽略掉全局最优解的情况. 以下分别就第7次(最优计算结果)和第8次的结果作详细分析.
图 15
图 15
均布载荷作用下本文解与理论解的对比
Fig. 15
Comparison of the presented solution and the theoretical solution
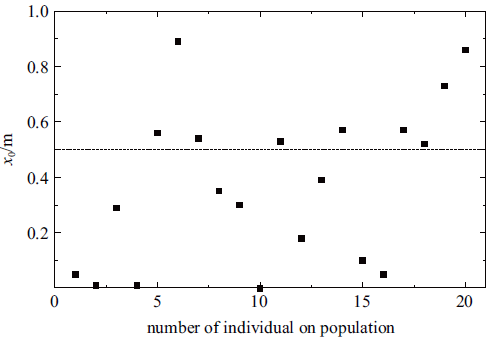
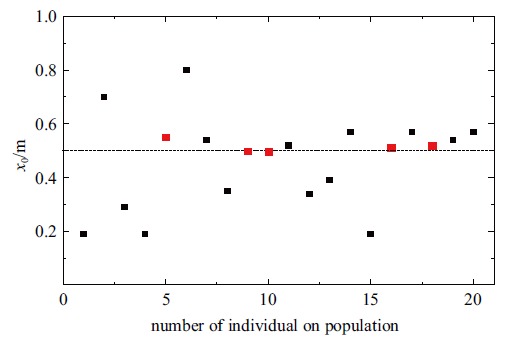
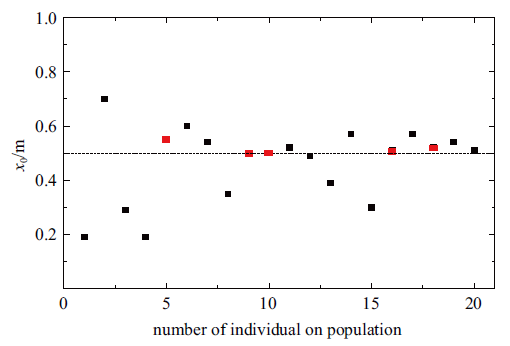
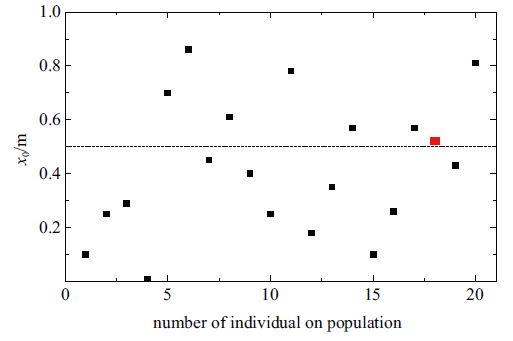
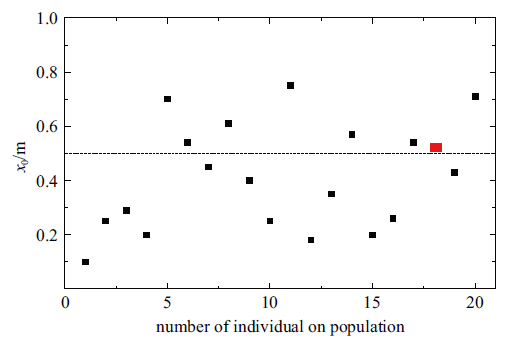
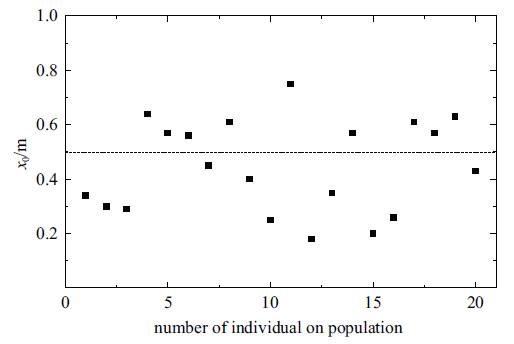
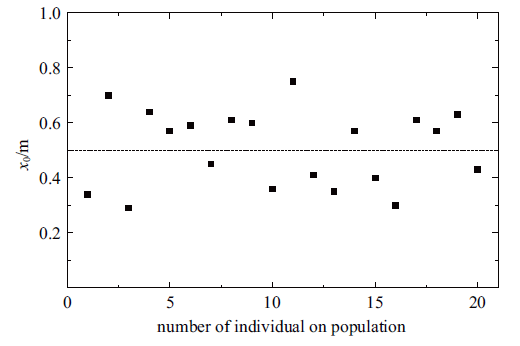
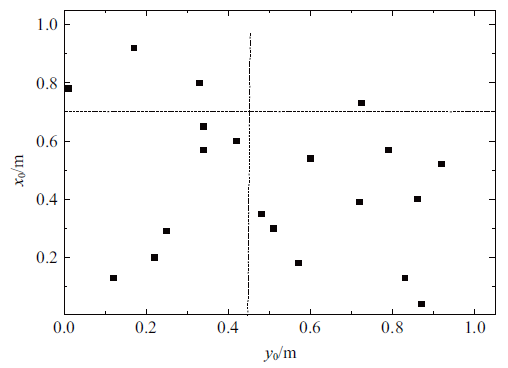
(1)第7次计算结果分析. 第7组数据迭代1次、5次、10次及15次的种群分布情况如图16 ~图19 所示(虚线位置$y_{0}=0.5$ m是本算例最优解), 并以样本方差式(31)模拟肋条的位置与最优解之间的偏离程度
(31) $ \begin{eqnarray} \label{eq31} S^2=\frac{1}{n-1}\sum \limits_{i=1}^n {\left( {x_i -\bar{{x}}} \right)^2} \end{eqnarray}$
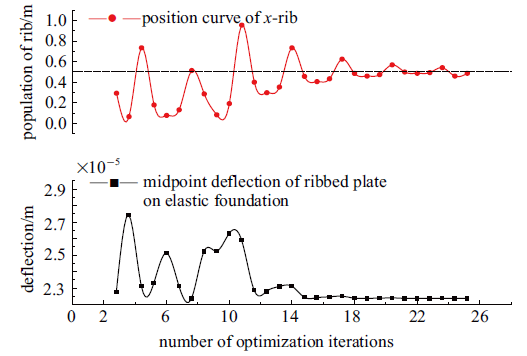
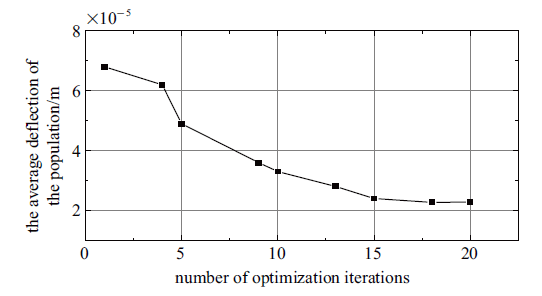
样本的容量$n$为种群个体的数目, 取20, 随机变量$x_{i}$即为肋条的位置, $\bar{{x}}$为最优解, 本算例中$\bar{{x}}=0.5$ m,迭代1次、5次、10次及15次的方差分别为0.098, 0.049, 0.029, 0.020. 此外, 第7组数据搜索解的过程如图20 所示,每一代种群里中心点挠度的平均值变化曲线如图21 所示.
由图16 ~图21 可知随着迭代次数的增加, 种群中的优势个体逐渐增多, 个体逐步向最优解靠近, 板中心点挠度值亦逐渐降低,当迭代次数达到一定值时结果收敛, 证明了遗传算法的有效性. 比较第10代和第15代种群的分布发现, 在同一代种群或者相邻的两代种群之间有些个体是相同的(图中红色标记), 是由于遗传算法每次迭代都是种群里适应度高的个体参与到下一步运算的几率较大, 反之则小, 从而引起部分个体重复出现. 此外,由第1代分布图可知初始种群在板的尺寸范围内随机分布且分散, 说明了遗传算法在优化过程中搜索的随机性和全局寻优性能.
图 16
图 16
迭代1次
Fig. 16
The first generation
图 17
图 17
迭代5次
Fig. 17
The fifth generation
图 18
图 18
迭代10次
Fig. 18
The tenth generation
图 19
图 19
迭代15次
Fig. 19
The fifteenth generation
图 20
图 20
第7组结果的搜索模拟过程
Fig. 20
Optimization process of the seventh set of data
图 21
图 21
种群的挠度平均值变化趋势
Fig. 21
The trend of the average deflection of the population
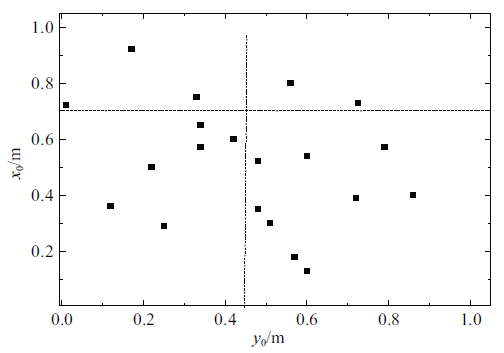
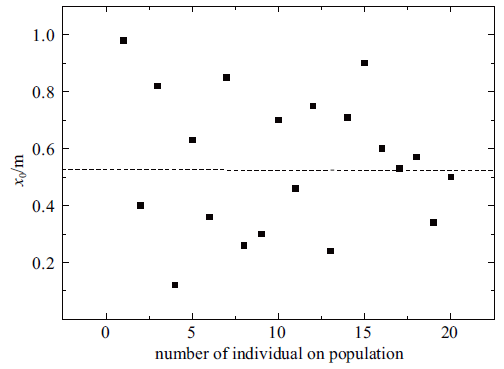
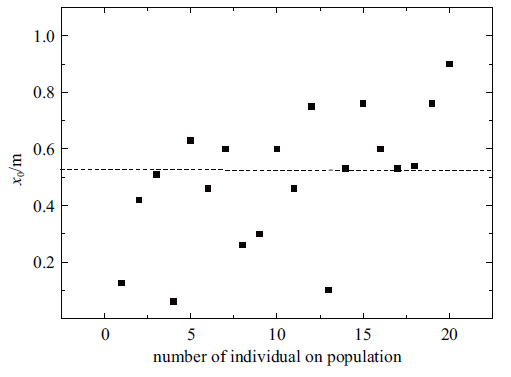
(2)第8次计算结果分析. 第8组数据迭代1次、5次、10次及15次的种群分布情况如图22 ~图25 所示, 方差计算结果分别为0.068, 0.046, 0.032, 0.020, 数据搜索解的过程如图26 所示. 结果表明: 随着迭代次数的增加, 群体的总体分布趋势亦是逐渐向最优解靠近, 但最终收敛于一个局部最优解, 且在进化过程中出现了优势个体丢失的情况, 例如第1代出现了个体最优点$y=0.52$ m (图中红色标记), 却在第10代丢失. 这主要是由于传统的遗传体制和根据适应度进行比例选择的保留策略, 会让适应度值大的优势个体在下一代进化选择中得到相对较多的取样, 而某些适应性较差的劣势个体则被过早丢弃, 随着迭代代数的递增,产生了局部最优解.
以上研究表明: 本文方法在优化弹性地基加肋板肋条位置方面是有效的, 另外在寻优过程中可能出现收敛于局部最优解的现象, 可通过多次计算, 对比所得结果找出最优解可保证准确性.
图 22
图 22
迭代1次
Fig. 22
The first generation
图 23
图 23
迭代5次
Fig. 23
The fifth generation
图 24
图 24
迭代10次
Fig. 24
The tenth generation
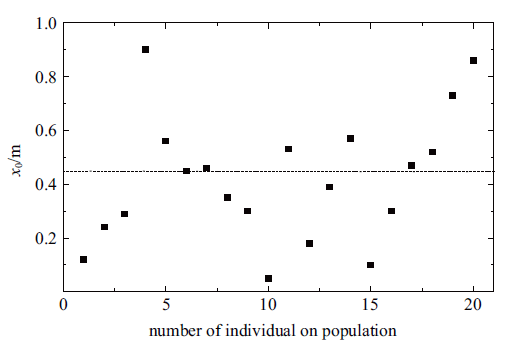
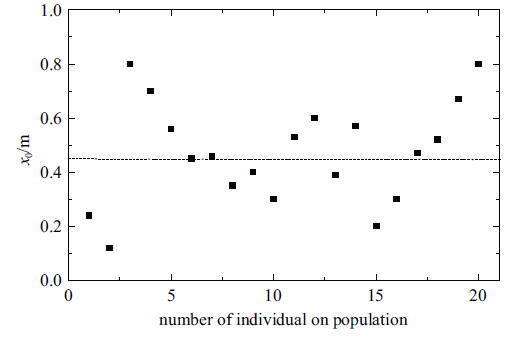
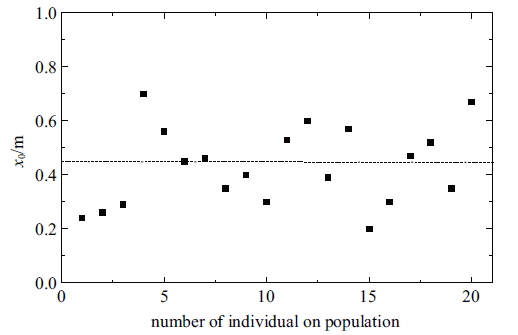
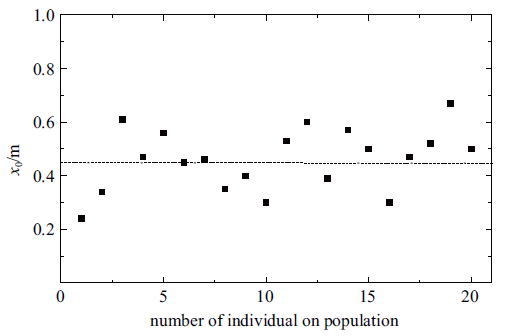
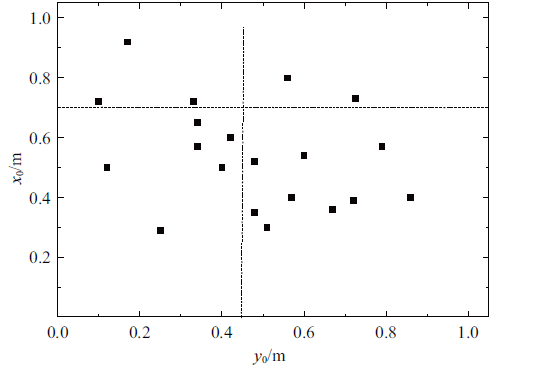
在算例2.3.1的基础上将均布载荷改成局部载荷(图27 ), 其余参数不变, 进行10次优化计算, 结果见表6 , 表明第4次计算结果最优,控制点的位移最小(4.819 59 $\times 10^{-6}$ m), 且与第2、第7、第8及第10次的计算结果相对差值均很小,故选$x_{0}=0.44$ m为最优解. 第4组迭代1次、5次、10次以及15次的种群分布情况图28 $\sim$31(虚线位置$x_{0}=0.44$ m), 其样本方差分别为0.057, 0.036, 0.022, 0.014.
图 25
图 25
迭代15次
Fig. 25
The fifteenth generation
图 26
图 26
第8组结果的搜索模拟过程
Fig. 26
Optimization process of the eighth set of data
图 27
图 27
受局部载荷的弹性地基加肋板
Fig. 27
Ribbed plate on elastic foundation under local loads
图 28
图 28
迭代1次
Fig. 28
The first generation
图 29
图 29
迭代5次
Fig. 29
The fifth generation
结果表明: 随着迭代次数的递增种群逐渐向最优点靠近, 挠度逐渐降低, 最终可求出弹性地基加肋板在相应载荷作用下肋条的最佳摆放位置.
2.3.3 垂直双肋条弹性地基加肋板的肋条位置优化分析
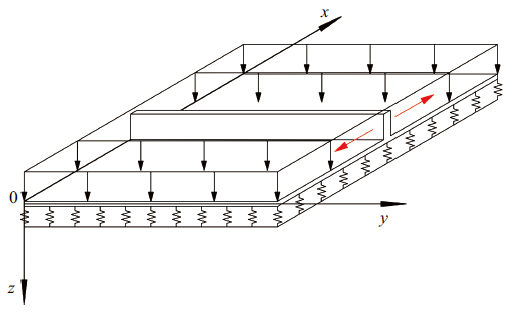
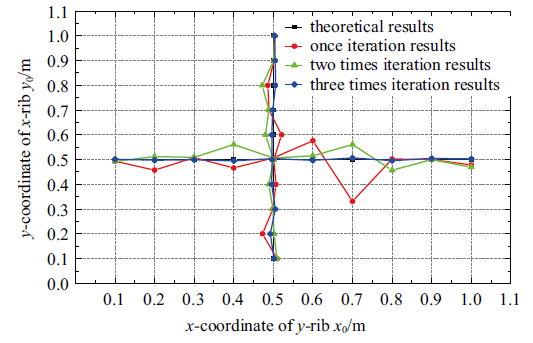
一四边固支垂直双肋条(记$x$向、$y$向肋条, 下同)弹性地基板$E=17$ MPa, $\mu=0.3$, $h_{\rm p}=0.01$ m, $h_{\rm s}=0.1$ m, $t_{\rm s}=0.01$ m, $L=W=1$ m, $\xi=4.0\times 10^{4}$ N/m$^{3}$ (图32 ). 考虑局部载荷1 N/m$^{2}$作用对$x$, $y$方向上的肋条位置进行优化, 此时优化计算包含两个设计变量, 即$x$向肋条的$y$坐标值及$y$向肋条的$x$坐标值, 10次优化计算结果见表7 .
图 30
图 30
迭代10次
Fig. 30
The tenth generation
图 31
图 31
迭代15次
Fig. 31
The fifteenth generation
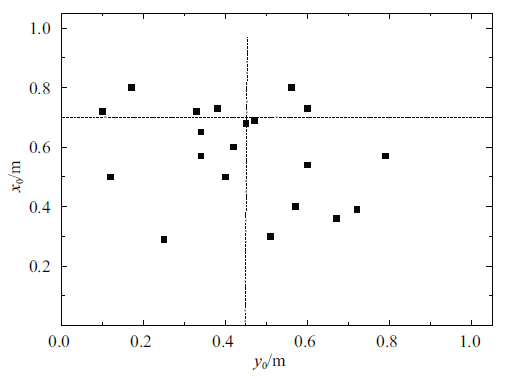
表明第2次计算结果最优, 弹性地基板中点的位移最小($3.824 15\times 10^{-6}$ m), 其与第1、第7以及第10次结果相对差值均很小,故选$y$向肋条$x_{0}$ = $0.703 92$ m、$x$向肋条在$y_{0}=0.449 56$ m为最优解. 第2组迭代1次、5次、10次及15次的种群分布如图33 ~图36 所示(虚线位置$x_{0}=0.703 92$ m, $y_{0}$ = $0.449 56$ m), 样本方差见分别为0.143, 0.101, 0.082, 0.074.
图 32
图 32
局部载荷下垂直双肋条弹性地基板
Fig. 32
Vertical double ribbed plate on elastic foundation under local load
图 33
图 33
迭代1次
Fig. 33
The first generation
图 34
图 34
迭代5次
Fig. 34
The fifth generation
图 35
图 35
迭代10次
Fig. 35
The tenth generation
图 36
图 36
迭代15次
Fig. 36
The fifteenth generation
由种群分布图及方差结果可看出: 随着迭代次数的递增种群逐渐向最优解靠近, 最终求出局部载荷作用下肋条的最佳摆放位置, 说明本文方法在包含多个变量的双肋条板优化方面亦是有效的.
2.4 改进混合遗传算法算例分析
以受均布载荷作用的垂直双肋条板为例, 验证改进后遗传算法的有效性, 再将改进后混合遗传算法与传统遗传算法进行对比分析, 最后基于改进后混合遗传算法对线性面载荷作用下单肋条弹性地基加肋板的肋条位置作优化分析.
将算例2.3.3中四边固支弹性地基加肋板所受的局部载荷改成均布载荷, 大小仍为1 N/m$^{2}$, 其余参数不变, 显然两个肋条的最佳位置分别为地基板$x$和$y$向中心对称轴处($x$向肋条$y_{0}=0.5$ m、$y$向肋条在$x_{0}=0.5$ m).采用改进混合遗传算法进行10次优化分析: 遗种群数取20, 利用Metropolis准则进行选择操作, 交叉概率$P_{\rm c}=0.4$、并采用自适应变异概率, 起始温度$T_{0}=100$, 衰减系数$\alpha =0.9$, 分别迭代1次、2次、3次, 结果见表8 ~表10 和图37 .
图 37
图 37
不同迭代次数的结果对比
Fig. 37
Comparison of the results with different iterations
结果表明, 迭代1次的结果波动相对较大, 直至迭代3次后计算结果稳定, 其相对误差均小于0.1%. 因此, 采用改进混合遗传算法对肋条位置进行优化分析时, 只进行3次便可获得稳定的最优解, 大幅度提高了计算效率且稳定性好.
采用改进混合遗传算法分别计算2.3.2节及2.3.3节中的算例, 迭代次数取3, 结果见表11 . 结果表明: 改进后混合遗传算法与传统遗传算法计算结果相对误差极小, 且前者可在降低迭代运算次数的前提下保证计算精度, 可见改进混合遗传算法收敛速度相对较快. 此外, 在优化计算中, 传统遗传算法与改进混合遗产算法主要用来进行样本选择, 再通过本文所建立的无网格模型进行计算, 同时无网格模型优势在于可以任意改变肋条位置而不用重新分布板节点, 在优化肋条位置时可以减少离散板的计算量. 因此, 遗传和混合算法同样适用于斜向交叉或一般角度的肋条板的优化分析.
2.4.3 线性面载荷作用下单肋条弹性地基加肋板的肋条位置优化
一四边固支弹性地基加肋板如图38 所示, $E=17$ MPa, $\mu=0.3$, $h_{\rm p}=0.01$ m, $h_{\rm s}=0.1$ m, $t_{\rm s}=0.01$ m, $W=L=1$ m, $\xi =4.0\times 10^{4}$ N$\cdot $m$^{-3}$, 线性面载荷最大处为1 N/m$^{2}$. 采用改进混合遗传算法进行10次优化计算, 结果见表12 .
图 38
图 38
线性面载荷下弹性地基加肋板
Fig. 38
Ribbed plate on elastic foundation subjected to linear surface load
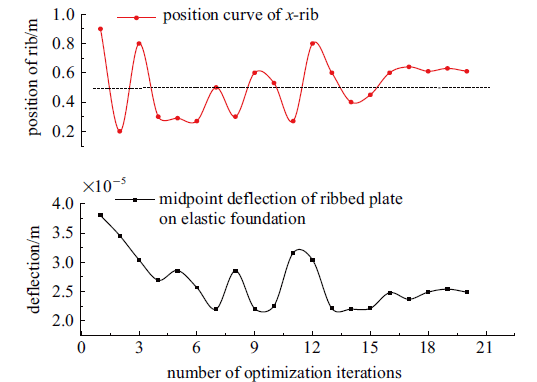
从表12 可看出第7次的优化结果最佳($x_{0}=0.520 182$ m, 控制点挠度为$1.012 47\times 10^{-5}$ m),其迭代1次、3次的种群分布如图39 、图40 所示. 结果再次验证了改进混合遗传收敛速度快, 仅迭代3次种群已向最优解靠近.
图 39
图 39
迭代1次
Fig. 39
The first generation
图 40
图 40
迭代3次
Fig. 40
The third generation
3 结论
本文基于遗传算法及一阶剪切理论, 提出了一种弹性地基上加肋板肋条位置优化的无网格方法, 通过不同的算例将本文解与有限元解及现有文献解进行比较, 主要结论如下:
(1)采用本文方法可有效求解弹性地基上加肋板(包括垂直布置肋条、斜向交叉布置肋条等)弯曲问题, 结果易趋于稳定、收敛较快,且与现有文献解、有限元计算结果的相对误差均在5%以内, 其精度能满足工程要求.
(2)基于遗传算法与改进混合遗传算法所提出的方法均可有效优化弹性地基加肋板肋条位置, 合理控制目标点的挠度: 在特定载荷作用下,随着迭代次数的递增种群逐步向最优点靠近, 最终可求出相应载荷作用下肋条的最佳摆放位置. 此外, 在优化计算中, 传统遗传算法与改进混合遗产算法主要用来进行样本选择, 再通过本文所建立的无网格模型进行计算, 故两者均适用于斜向交叉或一般角度的肋条板的优化分析. 相比之下, 对于任意肋条布置方式, 改进混合遗传算法的计算效率更高, 只进行了3次迭代便可获得稳定的最优解.
(3)由本文所建立的肋条与地基板之间的位移协调方程, 完全基于分布在地基板上的离散点来给出问题的近似数值解, 点与点之间没有单元或其他的直接连接, 即使在优化过程中肋条位置不断改变也不会导致筏板节点的重新分布. 因此可以实现肋条在平板上按任意位置布置, 且可在保证计算结果满足所需精度的情况下保持地基板的离散方案不变, 只要重新计算位移转换矩阵$T_{\rm p}$, 省去了繁杂的网格重置工作, 可见其在肋条位置重分布的结构优化计算方面具有很大的优势.
综上所述, 从工程的角度看, 对于求解较为复杂的肋条布置、结构优化等问题, 该方法具有一定的优势.
参考文献
View Option
[1]
乔迟 , 张世联 . 大跨度加筋板架优化设计研究
舰船科学技术 , 2015 ,37 (8 ):23 -26
[本文引用: 2]
( Qiao Chi Zhang Shilian . Research on optimization design of long span stiffened plates
Ship Science and Technology , 2015 ,37 (8 ):23 -26 (in Chinese))
[本文引用: 2]
[2]
吴红刚 , 牌立芳 , 赖天文 等 . 山区机场高填方边坡桩-锚-加筋土组合结构协同工作性能优化研究
岩石力学与工程学报 , 2019 ,38 (7 ):1498 -1511
[本文引用: 1]
( Wu Honggang Pai Lifang Lai Tianwen , et al . Study on cooperative performance of pile-anchor-reinforced soil combined retaining structure of high fill slopes in mountainous airports
Chinese Journal of Rock Mechanics and Engineering , 2019 ,38 (7 ):1498 -1511 (in Chinese))
[本文引用: 1]
[3]
陈炉云 , 张裕芳 . 基于遗传算法的复合材料结构-声辐射优化研究
复合材料学报 , 2012 ,29 (3 ):203 -207
[本文引用: 1]
( Chen Luyun Zhang Yufang . Research on composite structure-acoustic radiation optimization based on genetic algorithm
Journal of Composite Materials , 2012 ,29 (3 ):203 -207 (in Chinese))
[本文引用: 1]
[4]
李林远 . 基于无网格法的矩形加肋板结构优化设计. [硕士论文]
南宁: 广西大学 , 2016
[本文引用: 1]
( Li Linyuan . Optimization design of rectangular ribbed plate structure based on meshless method. [Master Thesis]
Nanning: Guangxi University , 2016 (in Chinese))
[本文引用: 1]
[5]
龚曙光 , 曾维栋 , 张建平 . Reissner-Mindlin 板壳无网格法的闭锁与灵敏度分析及优化的研究
工程力学 , 2011 ,28 (4 ):42 -48
[本文引用: 1]
( Gong Shuguang Zeng Weidong Zhang Jianping . Study on numerical locking and sensitivity analysis and optimization of Reissner-Mindlin plate and shell with meshless method
Engineering Mechanics , 2011 ,28 (4 ):42 -48 (in Chinese))
[本文引用: 1]
[6]
彭细荣 , 隋允康 . 考虑破损-安全的连续体结构拓扑优化ICM方法
力学学报 , 2018 ,50 (3 ):611 -621
( Peng Xirong Sui Yunkang . ICM method for fail-safe topology optimization of continuum structures
Chinese Journal of Theoretical and Applied Mechanics , 2018 ,50 (3 ):611 -621 (in Chinese))
[7]
王选 , 刘宏亮 , 龙凯 等 . 基于改进的双向渐进结构优化法的应力约束拓扑优化
力学学报 , 2018 ,50 (2 ):385 -394
[本文引用: 1]
( Wang Xuan Liu Hongliang Long Kai , et al . Stress-constrained topology optimization based on improved bidirectional evolutionary optimization method
Chinese Journal of Theoretical and Applied Mechanics , 2018 ,50 (2 ):385 -394 (in Chinese))
[本文引用: 1]
[8]
Belytshko T Lu YY Gu L . Element-free Galerkin methods
International Journal for Numerical Methods in Engineering , 1994 ,37 (2 ):229 -256
[本文引用: 1]
[9]
Liu GR Mesh Free Methods: Moving Beyond the Finite Element Method . Boca Raton : CRC Press , 2002
[本文引用: 1]
[10]
张雄 , 刘岩 , 马上 . 无网格法的理论及应用
力学进展 , 2009 ,39 (1 ):1 -36
[本文引用: 1]
( Zhang Xiong Liu Yan Ma Shang . Theory and application of meshless method
Advances in Mechanics , 2009 ,39 (1 ):1 -36 (in Chinese))
[本文引用: 1]
[11]
张雄 , 宋康祖 , 陆明万 . 无网格法研究进展及其应用
计算力学学报 , 2003 ,20 (6 ):730 -742
[本文引用: 2]
( Zhang Xiong Song Kangzu Lu Mingwan . Research progress and application of meshless method
Chinese Journal of Computational Mechanics , 2003 ,20 (6 ):730 -742 (in Chinese))
[本文引用: 2]
[12]
吴宇 , 覃霞 , 吴天文 等 . 基于无网格法的弹性地基加肋斜板频率数值解
计算力学学报 , 2019 ,36 (1 ):110 -116
[本文引用: 1]
( Wu Yu Qin Xia Wu Tianwen , et al . Numerical solution frequencies of stiffened skew plate on elastic foundation via meshless method
Chinese Journal of Computational Mechanics , 2019 ,36 (1 ):110 -116 (in Chinese))
[本文引用: 1]
[13]
庞作会 , 葛修润 , 王水林 . 无网格伽辽金法(EFGM)在边坡开挖问题中的应用
岩土力学 , 1999 ,20 (1 ):61 -64
[本文引用: 1]
( Pang Zuohui Ge Xiurun Wang Shuilin . Application of meshless Galerkin method (EFGM) to slope excavation
Rock and Soil Mechanics , 1999 ,20 (1 ):61 -64 (in Chinese))
[本文引用: 1]
[14]
龙述尧 . 弹性力学问题的局部Petrov-Galerkin方法
力学学报 , 2001 ,33 (4 ):508 -518
( Long Shuyao . Local Petrov-Galerkin method for elastic mechanics problems
Chinese Journal of Theoretical and Applied Mechanics , 2001 ,33 (4 ):508 -518 (in Chinese))
[15]
龙述尧 . 用无网格局部Petrov-Galerkin法分析弹性地基上的梁
湖南大学学报(自然科学版) , 2001 ,28 (5 ):11 -15
( Long Shuyao . Analysis of beams on elastic foundations by meshless local Petrov-Galerkin method
Journal of Hunan University (Natural Science) , 2001 ,28 (5 ):11 -15 (in Chinese))
[16]
方电新 , 李卧东 , 王元汉 等 . 用无网格法计算平板弯曲问题
岩土力学 , 2001 ,22 (3 ):347 -349
( Fang Dianxin Li Wodong Wang Yuanhan , et al . Calculation of plate bending problem using meshless method
Rock and Soil Mechanics , 2001 ,22 (3 ):347 -349 (in Chinese))
[17]
周瑞忠 , 周小平 , 缪圆冰 . 具有自适应影响半径的无单元法
工程力学 , 2001 ,18 (6 ):94 -99
( Zhou Ruizhong Zhou Xiaoping Miao Yuanbing . Element-free method with adaptive radius of influence
Engineering Mechanics , 2001 ,18 (6 ):94 -99 (in Chinese))
[18]
Song KZ . Meshless method based on collocation with consistent compactly supported radial basis functions
Acta Mechanica Sinica , 2004 ,20 (5 ):551 -557
[19]
张希 , 姚振汉 . 无网格彼得洛夫伽辽金法在大变形问题中的应用
工程力学 , 2006 ,23 (s1 ):16 -20
( Zhang Xi Yao Zhenhan . Application of the meshless Petrof Galerkin method in large deformation problems
Engineering Mechanics , 2006 ,23 (s1 ):16 -20 (in Chinese))
[20]
Liew KM Peng LX Kitipornchai S . Nonlinear analysis of corrugated plates using a FSDT and a meshfree method
Computer Methods in Applied Mechanics and Engineering , 2007 ,196 (21-24 ):2358 -2376
[21]
Wang D Wang JR Wu JC . Superconvergent gradient smoothing meshfree collocation method
Computer Methods in Applied Mechanics and Engineering , 2018 ,340 :728 -766
[22]
Zhang Z Liew KM Cheng Y , et al . Analyzing 2D fracture problems with the improved element-free Galerkin method
Engineering Analysis with Boundary Elements , 2008 ,32 (3 ):241 -250
[23]
Liu WK Jun S Zhang YF . Reproducing kernel particle method
International Journal for Numerical Methods in Engineering , 1995 ,38 (10 ):1655 -1679
[本文引用: 1]
[24]
Liu WK Chen Y Jun S , et al . Overview and applications of the reproducing kernel particle methods
Archives of Computational Methods in Engineering , 1996 ,3 (1 ):3 -80
[本文引用: 1]
[25]
Peng LX Liew KM Kitipornchai S . Buckling and free vibration analyses of stiffened plates using the FSDT mesh-free method
Journal of Sound and Vibration , 2006 ,289 (3 ):421 -449
[26]
Peng LX Kitipornchai S Liew KM . Analysis of rectangular stiffened plates under uniform lateral load based on FSDT and element-free Galerkin method
International Journal of Mechanical Sciences , 2005 ,47 (2 ):251 -276
[27]
Peng LX Liew KM Kitipornchai S . Analysis of stiffened corrugated plates based on the FSDT via the mesh-free method
International Journal of Mechanical Sciences , 2007 ,49 (3 ):364 -378
[28]
Peng LX Kitipornchai S Liew KM . Bending analysis of folded plates by the FSDT meshless method
Thin-Walled Structures , 2006 ,44 (11 ):1138 -1160
[29]
彭林欣 . 矩形加肋板线性弯曲分析的移动最小二乘无网格法
计算力学学报 , 2012 ,29 (2 ):210 -216
[本文引用: 1]
( Peng Linxin . Moving least squares meshless method for linear bending analysis of rectangular ribbed plates
Chinese Journal of Computational Mechanics , 2012 ,29 (2 ):210 -216 (in Chinese))
[本文引用: 1]
[30]
覃霞 , 刘珊珊 , 吴宇 等 . 平行四边形加肋板自由振动分析的无网格法
工程力学 , 2019 ,36 (3 ):24 -32, 39
( Qin Xia Liu Shanshan Wu Yu , et al . The meshless method for free vibration analysis of parallelogram ribbed plates
Engineering Mechanics , 2019 ,36 (3 ):24 -32, 39 (in Chinese))
[31]
邓立克 , 王东东 , 王家睿 等 . 薄板分析的线性基梯度光滑伽辽金无网格法
力学学报 , 2019 ,51 (3 ):690 -702
( Deng Like Wang Dongdong Wang Jiarui Wu Junchao . A gradient smoothing Galerkin meshfree method for thin plate analysis with linear basis function
Chinese Journal of Theoretical and Applied Mechanics , 2019 ,51 (3 ):690 -702 (in Chinese))
[32]
马文涛 . 二维弹性力学问题的光滑无网格伽辽金法
力学学报 , 2018 ,50 (5 ):1115 -1124
( Ma Wentao . A smoothed meshfree Galerkin method for 2D elasticity problem
Chinese Journal of Theoretical and Applied Mechanics , 2018 ,50 (5 ):1115 -1124 (in Chinese))
[33]
宋彦琦 , 周涛 . 基于S-R和分解定理的三维几何非线性无网格法
力学学报 , 2018 ,50 (4 ):853 -862
[本文引用: 1]
( Song Yanqi Zhou Tao . Three-dimensional geometric nonlinearity element-free method based on S-R decomposition theorem
Chinese Journal of Theoretical and Applied Mechanics , 2018 ,50 (4 ):853 -862 (in Chinese))
[本文引用: 1]
[34]
Goldberg , David E . Genetic Algorithms in Search, Optimization, and Machine Learning
New York: Addison-wesley publishing company , 1989
[本文引用: 2]
[35]
Koza J R Genetic Programming: On the Programming of Computers by Means of Natural Selection . Cambridge : MIT Press , 1992
[本文引用: 1]
[36]
杨卫波 , 王万良 , 张景玲 等 . 基于遗传模拟退火算法的矩形件优化排样
计算机工程与应用 , 2016 ,52 (7 ):259 -263
[本文引用: 2]
( Yang Weibo Wang Wanliang Zhang Jingling , et al . Optimized layout of rectangular parts based on genetic simulated annealing algorithm
Computer Engineering and Applications , 2016 ,52 (7 ):259 -263 (in Chinese))
[本文引用: 2]
[37]
孟凡超 , 初佃辉 , 李克秋 等 . 基于混合遗传模拟退火算法的SaaS构件优化放置
软件学报 , 2016 ,27 (4 ):916 -932
( Meng Fanchao Chu Dianhui Li Keqiu , et al . Optimal placement of SaaS components based on hybrid genetic simulated annealing algorithm
Journal of Software , 2016 ,27 (4 ):916 -932 (in Chinese))
[38]
周鑫 , 马跃 , 胡毅 . 求解车间作业调度问题的混合遗传模拟退火算法
小型微型计算机系统 , 2015 ,36 (2 ):370 -374
[本文引用: 1]
( Zhou Xin Ma Yue Hu Yi . Hybrid Genetic Simulated Annealing Algorithm for Job Shop Scheduling Problem
Journal of Chinese Computer Systems , 2015 ,36 (2 ):370 -374 (in Chinese))
[本文引用: 1]
[39]
Salkauskas PL . Surfaces generated by moving least squares methods
Mathematics of Computation , 1981 ,37 (155 ):141 -158
[本文引用: 1]
[40]
Reddy JN . Theory and Analysis of Elastic Plates
London: Taylor & Francis , 1999
[本文引用: 2]
[41]
Chen J Pan C Wu C , et al . Reproducing Kernel Particle Methods for large deformation analysis of non-linear structures
Computer Methods in Applied Mechanics and Engineering , 1996 ,139 (1 ):195 -227
[本文引用: 1]
[42]
陈英杰 , 李志航 , 付宝连 . 应用混合变量余能原理求解不同载荷作用下四边简支矩形板的弯曲
计算力学学报 , 2015 ,32 (2 ):287 -292
[本文引用: 3]
( Chen Yingjie Li Zhihang Fu Baolian . Apply the principles of complementary energy with mixed variables to solve the bending of the rectangular plate with simply supported on four sides under different loads
Chinese Journal of Computational Mechanics , 2015 ,32 (2 ):287 -292 (in Chinese))
[本文引用: 3]
大跨度加筋板架优化设计研究
2
2015
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
... [1 ]利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
大跨度加筋板架优化设计研究
2
2015
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
... [1 ]利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
山区机场高填方边坡桩-锚-加筋土组合结构协同工作性能优化研究
1
2019
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
山区机场高填方边坡桩-锚-加筋土组合结构协同工作性能优化研究
1
2019
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
基于遗传算法的复合材料结构-声辐射优化研究
1
2012
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
基于遗传算法的复合材料结构-声辐射优化研究
1
2012
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
基于无网格法的矩形加肋板结构优化设计. [硕士论文]
1
2016
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
基于无网格法的矩形加肋板结构优化设计. [硕士论文]
1
2016
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
Reissner-Mindlin 板壳无网格法的闭锁与灵敏度分析及优化的研究
1
2011
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
Reissner-Mindlin 板壳无网格法的闭锁与灵敏度分析及优化的研究
1
2011
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
考虑破损-安全的连续体结构拓扑优化ICM方法
2018
考虑破损-安全的连续体结构拓扑优化ICM方法
2018
基于改进的双向渐进结构优化法的应力约束拓扑优化
1
2018
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
基于改进的双向渐进结构优化法的应力约束拓扑优化
1
2018
... 目前, 结构优化理论已被普遍应用到宇航飞行、建筑结构、造船机械等工程领域中[1 -7 ] . 例如, 乔迟等[1 ] 利用有限元方法分析了大跨度加筋板架的尺寸优化设计对结构性能的影响; 吴红刚等[2 ] 利用BIM技术分析了机场桩-锚-加筋组合结构的优化性能问题; 陈炉云等[3 ] 在遗传算法的基础上对复合材料板结构的结构-声辐射铺层几何优化问题进行了研究分析; 李林远[4 ] 主要采取约束随机方向法和混合遗传算法对矩形加肋板的肋条布局作优化分析, 以达到板中点挠度最小的目的; 龚曙光等[5 ] 以SCNI-MLS无网格法为基础, 采用连续型统一设计灵敏度分析方法和伴随变量法, 结合约束变尺度序列二次规划法, 开展了板壳结构的优化设计. ...
Element-free Galerkin methods
1
1994
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
1
2002
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
无网格法的理论及应用
1
2009
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
无网格法的理论及应用
1
2009
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
无网格法研究进展及其应用
2
2003
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
... [11 ]: 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
无网格法研究进展及其应用
2
2003
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
... [11 ]: 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
基于无网格法的弹性地基加肋斜板频率数值解
1
2019
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
基于无网格法的弹性地基加肋斜板频率数值解
1
2019
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
无网格伽辽金法(EFGM)在边坡开挖问题中的应用
1
1999
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
无网格伽辽金法(EFGM)在边坡开挖问题中的应用
1
1999
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
弹性力学问题的局部Petrov-Galerkin方法
2001
弹性力学问题的局部Petrov-Galerkin方法
2001
用无网格局部Petrov-Galerkin法分析弹性地基上的梁
2001
用无网格局部Petrov-Galerkin法分析弹性地基上的梁
2001
Meshless method based on collocation with consistent compactly supported radial basis functions
2004
无网格彼得洛夫伽辽金法在大变形问题中的应用
2006
无网格彼得洛夫伽辽金法在大变形问题中的应用
2006
Nonlinear analysis of corrugated plates using a FSDT and a meshfree method
2007
Superconvergent gradient smoothing meshfree collocation method
2018
Analyzing 2D fracture problems with the improved element-free Galerkin method
2008
Reproducing kernel particle method
1
1995
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
Overview and applications of the reproducing kernel particle methods
1
1996
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
Buckling and free vibration analyses of stiffened plates using the FSDT mesh-free method
2006
Analysis of rectangular stiffened plates under uniform lateral load based on FSDT and element-free Galerkin method
2005
Analysis of stiffened corrugated plates based on the FSDT via the mesh-free method
2007
Bending analysis of folded plates by the FSDT meshless method
2006
矩形加肋板线性弯曲分析的移动最小二乘无网格法
1
2012
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
矩形加肋板线性弯曲分析的移动最小二乘无网格法
1
2012
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
基于S-R和分解定理的三维几何非线性无网格法
1
2018
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
基于S-R和分解定理的三维几何非线性无网格法
1
2018
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
Genetic Algorithms in Search, Optimization, and Machine Learning
2
1989
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
... 基于遗传算法(GA)[34 ] 及改进混合遗传算法(HGA)对肋条位置进行优化, 在特定载荷作用下控制弹性地基加肋板中点的挠度. 本文的改进混合遗传算法是在遗传算法基础上引入模拟退火算法[36 ] , 利用Metropolis准则对个体进行选择操作, 辅以最优保存策略,并针对变异算子的特性采取自适应变异概率作变异运算, 效率相对较高. 优化运算的设计变量、目标函数及约束条件如下. ...
1
1992
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
基于遗传模拟退火算法的矩形件优化排样
2
2016
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
... 基于遗传算法(GA)[34 ] 及改进混合遗传算法(HGA)对肋条位置进行优化, 在特定载荷作用下控制弹性地基加肋板中点的挠度. 本文的改进混合遗传算法是在遗传算法基础上引入模拟退火算法[36 ] , 利用Metropolis准则对个体进行选择操作, 辅以最优保存策略,并针对变异算子的特性采取自适应变异概率作变异运算, 效率相对较高. 优化运算的设计变量、目标函数及约束条件如下. ...
基于遗传模拟退火算法的矩形件优化排样
2
2016
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
... 基于遗传算法(GA)[34 ] 及改进混合遗传算法(HGA)对肋条位置进行优化, 在特定载荷作用下控制弹性地基加肋板中点的挠度. 本文的改进混合遗传算法是在遗传算法基础上引入模拟退火算法[36 ] , 利用Metropolis准则对个体进行选择操作, 辅以最优保存策略,并针对变异算子的特性采取自适应变异概率作变异运算, 效率相对较高. 优化运算的设计变量、目标函数及约束条件如下. ...
基于混合遗传模拟退火算法的SaaS构件优化放置
2016
基于混合遗传模拟退火算法的SaaS构件优化放置
2016
求解车间作业调度问题的混合遗传模拟退火算法
1
2015
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
求解车间作业调度问题的混合遗传模拟退火算法
1
2015
... 无网格方法[8 ] 是近年来一种新的数值方法, 文献[9 ,10 ,11 ,12 ] 主要论述了无网格法的研究进展, 给出了无网格法在碰撞、动态裂纹扩展、金属加工成型、流体力学以及其他领域中的应用. 无网格法主要有如下优点[11 ] : 容易构造高阶形函数, 提高精度且减少后处理工作量; 能够解决一些超大变形问题、裂纹扩展问题和高速冲击问题等; 不需要网格划分且较易进行自适应分析. 近年来, 国内外学者在无网格方法的拓展创新性研究上不断探索[13 -33 ] . 例如, Liu等[23 -24 ] 在Glerkin法的基础上提出了多尺度重构核质点法(multi scale reproducing kernel particle method, MRKPM),主要应用在结构的动力响应、CFD以及声学分析方面; 彭林欣[29 ] 采用了移动最小二乘无网格方法对矩形加肋板的弯曲问题进行计算分析. 仿生学算法中的遗传算法[34 -35 ] 作为一种优化方法, 是一个全局优化能力强的算法, 但是计算效率不高. 近年来, 这类适合并行计算的全局搜索方法一般与其他局部搜索能力强的算法结合起来形成混合算法[36 -38 ] , 被应用在结构优化设计中. ...
Surfaces generated by moving least squares methods
1
1981
... 由移动最小二乘近似[39 ] 求出平板第$I$个节点的形函数 ...
Theory and Analysis of Elastic Plates
2
1999
... 平板节点自由度包括$u_{o\rm p}$, $v_{o\rm p}$, $w_{\rm p}$, $\varphi_{{\rm p}x}$, $\varphi_{{\rm p}y}$, 其中$u_{o\rm p}$, $v_{o\rm p}$, $w_{\rm p}$分别表示节点沿$x$, $y$, $z$方向的平动位移, $\varphi_{{\rm p}x}$, $\varphi_{{\rm p}y}$分别表示节点绕$y$, $x$轴的转角. 基于一阶剪切变形理论[40 ] , 将平板位移场表示为 ...
... 式中, ${\Delta }_{p} =\{{\Delta }_{p1}\ \ {\Delta }_{p2}\ \ ... \ \ {\Delta }_{pn} \}^{\rm T}$, $[{K}_{p} ]_{IJ} =\iiint_{-{h_{\rm p}}/{2}}^{{h_{\rm p} }/{2}} {{B}_{\kappa I}^{\rm T} } {D B}_{\kappa J} \mbox{d}z\mbox{d}x\mbox{d}y+({h_{\rm p} }/{\alpha })\iint {{B}_{\gamma I}^{\rm T} }{A}_{\rm s} {B}_{\gamma J} \mbox{d}x\mbox{d}y$, $\alpha ={5}/{6}$为剪切修正系数[40 ] , ${A}_{\rm s} =\left[\begin{array}{l@{\quad }l} G&0 \\ 0&G \\ \end{array} \right]$, $G=\dfrac{E}{2(1+\mu )}$, $D=\dfrac{E}{1-\mu ^2}\left[ {{\begin{array}{c@{\quad }c@{\quad }c} 1 & \mu & 0 \\ \mu & 1 & 0 \\ 0 & 0 & (1-\mu)/2 \\ \end{array} }} \right].$ ...
Reproducing Kernel Particle Methods for large deformation analysis of non-linear structures
1
1996
... 此外, 本文采用完全转换法[41 ] 处理本质边界条件, 可求解弹性地基加肋板的静力弯曲问题. ...
应用混合变量余能原理求解不同载荷作用下四边简支矩形板的弯曲
3
2015
... 一四边简支平板$E=210$ GPa, $\mu =0.3$, $h_{\rm p}=0.01$ m, $W=L=1$ m, 受均布载荷$q$作用. 现采用$13\times 13$个均布节点对其进行离散计算挠度, 并与文献[42 ] 、有限元解对比, 结果见表2 及图8 . 计算表明, 本文解与现有文献解、有限元解非常接近, 相对误差均在工程允许范围内, 有效验证了本文方法的有效性. ...
... Deflection of plate on elastic foundation subjected to a uniform load with simple support ($10^{-4}\times Dw/qL^{4}$)
10.6052/0459-1879-19-300.F008 图 8 本文方法与文献<sup>[<xref ref-type="bibr" rid="b42">42</xref>]</sup>、FEM的对比 Comparison of the presented method with Ref.<sup>[<xref ref-type="bibr" rid="b42">42</xref>]</sup> and FEM Fig. 8 ![]()
10.6052/0459-1879-19-300.F009 图 9 弹性地基加肋板受力示意 Ribbed plate on elastic foundation subjected to uniform loads Fig. 9 ![]()
结果表明, 在求解弹性地基加肋板的弯曲问题时, 本文解和有限元解的相对误差都小于5%, 充分证明了本文方法的有效性和准确性. ...
... [
42 ] and FEM
Fig. 8 ![]()
10.6052/0459-1879-19-300.F009 图 9 弹性地基加肋板受力示意 Ribbed plate on elastic foundation subjected to uniform loads Fig. 9 ![]()
结果表明, 在求解弹性地基加肋板的弯曲问题时, 本文解和有限元解的相对误差都小于5%, 充分证明了本文方法的有效性和准确性. ...
应用混合变量余能原理求解不同载荷作用下四边简支矩形板的弯曲
3
2015
... 一四边简支平板$E=210$ GPa, $\mu =0.3$, $h_{\rm p}=0.01$ m, $W=L=1$ m, 受均布载荷$q$作用. 现采用$13\times 13$个均布节点对其进行离散计算挠度, 并与文献[42 ] 、有限元解对比, 结果见表2 及图8 . 计算表明, 本文解与现有文献解、有限元解非常接近, 相对误差均在工程允许范围内, 有效验证了本文方法的有效性. ...
... Deflection of plate on elastic foundation subjected to a uniform load with simple support ($10^{-4}\times Dw/qL^{4}$)
10.6052/0459-1879-19-300.F008 图 8 本文方法与文献<sup>[<xref ref-type="bibr" rid="b42">42</xref>]</sup>、FEM的对比 Comparison of the presented method with Ref.<sup>[<xref ref-type="bibr" rid="b42">42</xref>]</sup> and FEM Fig. 8 ![]()
10.6052/0459-1879-19-300.F009 图 9 弹性地基加肋板受力示意 Ribbed plate on elastic foundation subjected to uniform loads Fig. 9 ![]()
结果表明, 在求解弹性地基加肋板的弯曲问题时, 本文解和有限元解的相对误差都小于5%, 充分证明了本文方法的有效性和准确性. ...
... [
42 ] and FEM
Fig. 8 ![]()
10.6052/0459-1879-19-300.F009 图 9 弹性地基加肋板受力示意 Ribbed plate on elastic foundation subjected to uniform loads Fig. 9 ![]()
结果表明, 在求解弹性地基加肋板的弯曲问题时, 本文解和有限元解的相对误差都小于5%, 充分证明了本文方法的有效性和准确性. ...















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}