

引言
为了全面掌握齿轮传动系统运动机理、揭示其全局动力学特性,将系统参数定义为参数变量, 构成参数空间,研究参数空间与状态空间耦合下齿轮传动系统的非线性动力学特性是非常有必要的.
近年来,很多国内外学者研究了各种非线性系统在两参数平面上的动力学行为及其分岔,如交通网络[8]、电路[9]、经济[10]、生物[11]以及冲击振动[12-16]等系统, 并获得很多有价值的研究成果.在齿轮传动系统方面,Mason等[17,18]基于双参数法研究了参数平面上擦边分岔曲线对齿轮系统全局动力学特性的影响,发现参数平面上可达边界鞍结点主要由擦边分岔或鞍结分岔产生.Xiang等[19]研究了含多个非线性参数的行星齿轮系统的动力学特性,发现选择合理的系统参数, 可以避免混沌运动对齿轮系统振动特性的影响.Gou等[20]研究单自由度直齿轮系统在参数平面上的分岔转迁过程,得到了参数平面上不同运动的连续存在区域.郜志英等[21]研究了非线性单级齿轮系统在参数平面内周期运动和混沌运动的分岔结构,得到了不同参数平面内的域界,并通过多项式拟合得到了周期运动稳定参数域和混沌吸引子的激变点.林何等[22]考虑了锥齿轮系统在参数域界结构中的稳态特性,数值分析了系统在多参数域共同激励下的动态分岔行为.苟向锋等[23]通过计算齿轮--转子系统在双参数平面上动力学行为分布图,得到系统双参数变化的周期运动和非周期运动的分布规律和分岔特性.以上文献对齿轮系统在参数平面上的动力学特性进行了广泛的研究,但这些研究只考虑系统在参数平面上的动力学特性,忽略状态空间的影响(忽略初值变化的影响). 因此,参数平面上可能存在的多稳态行为(共存吸引子)的存在区域及其分岔没有完全被揭示,一些潜在的动力学行为或分岔可能被隐藏,参数平面上一些重要的信息被丢失, 导致分析结果的精确性得不到保障.故参数空间和状态空间的耦合特性必须考虑.
本文研究了参数平面与状态平面耦合下单自由度齿轮传动系统的全局动力学特性.首先,设计了一个非线性系统在参数平面和状态平面耦合下多稳态行为的计算和辨识方法,并采用变步长四阶Runge-Kutta法对系统进行数值求解. 其次, 基于该方法,并结合相图、Poincaré映射图、最大Lyapunov指数(top lyapunov exponent, TLE)、吸引域等,研究了齿轮传动系统在参数平面上多稳态行为的分布特性;基于胞映射法[20]研究多稳态行为在状态平面上的分布特性以及其吸引域的演变规律.
1 齿轮传动系统非线性动力学模型
图1

式中, $x$, $\dot {x}$, $\ddot{x}$分别为相对位移、速度和加速度,$\xi $为阻尼比, $k$为啮合刚度波动幅值,$\varepsilon $为综合传递误差波动幅值, $F$为转矩,$\omega $为啮合频率, $f(x)$为非线性间隙函数, 可表示为
其中, $D$为量纲一齿侧间隙的一半.
单自由度齿轮传动系统基本参数为:主、从动轮齿数分别为30和60,齿宽分别为100和95 mm, 模数$m$= 3 mm, 压力角$\alpha = 20^ \circ $,间隙2$D$= 0.02 mm. 式(1)中,单级齿轮传动系统非线性动力学模型包含6个动力学参数, 其中,阻尼比$\xi$、刚度波动幅值$k$、误差波动幅值$\varepsilon$、齿侧间隙$D$为齿轮系统结构参数, 啮合频率$\omega$和转矩$F$为系统运动参数.
2 参数平面和状态平面耦合下多稳态行为的辨识方法
针对一个非线性系统, 任意选择两个参数$u_{1}$和$u_{2}$作为参数变量,由这两个参数变量构成 一个参数平面$\varSigma $= ($u_{1}$,$u_{2})$. 在状态空间定义一个Poincaré~截面$\varPi = \left\{{(x,\dot {x},t)\vert \bmod \;(t,T) = 0} \right\}$, 在截面$\varPi$上选择一个有界区域$\varOmega $= ($x$,$\dot{x})$作为考察状态平面. 参数平面$\varSigma$和状态平面$\varOmega$耦合下非线性系统全局动力学行为的计算和辨识方法描述如下.
首先, 将参数平面$\varSigma $划分为$m\times m$= $M$个小网格,建立参数子平面$\varSigma _{i}(i$= 1,2,$\cdots$,$M$),每一个小网格代表一个参数子平面.假设用每一个参数子平面中心点的全局动力学特性代表整个参数子平面的全局动力学特性,通过计算所有参数子平面中心点的全局特性, 可得整个参数平面$\varSigma$上的全局动力学特性.
其次, 将状态平面$\varOmega $划分为$n\times n$= $N$个小网格,建立状态子平面$\varOmega _{j}(j$= 1,2,$\cdots$,$N$),每一个状态子平面代表一组初始值,假设用状态子平面中心点的值代表这个初始值,则在有界状态平面$\varOmega $内有$N$个初始值需要被考察.
最后, 采用变步长四阶Runge-Kutta法数值求解非线性系统,计算每一个参数 子平面$\varSigma _{i}$在状态平面$\varOmega$内所有初值下的全局动力学特性, 通过计算每个解的最大Lyapunov指数(TLE)判断其稳定性, 对每一个$\varSigma _{i}$,在状态平面$\varOmega $内, 系统可能存在多个稳态解共存情况.当所有参数子平面$\varSigma _{i}(i$=1,2,$\cdots$,$M$)在状态平面$\varOmega$内的全局动力学特性被计算完后, 可得系统在整个参数平面$\varSigma$上的全局动力学特性,进而得到系统在参数平面和状态平面耦合下多稳态行为在参数平面上的分布特性,基于胞映射方法可得每一个参数子平面在状态平面上多稳态行为的分布特性及吸引域.
此外, 参数平面$\varSigma $和状态平面$\varOmega $一定时,随着网格数量($N$或$M$)的增大, 其计算精度越高,但计算量和计算时间也将呈指数倍地增大. 因此,在计算时应根据实际需求选择合理的网格数量.
3 单参数变量与状态平面的耦合特性
方程(1)中, 以啮合频率$\omega $(0.4$<$$\omega$$<$1.2)作为参数变量, 构成一维参数空间, 其他参数$F$= 0.05, $\xi $= 0.01, $k$= 0.1, $\varepsilon$= 0.2, $D$= 1.0固定. 状态平面$\varOmega = \{(x,\dot {x})\vert-2.0 \le x \le 2.0,-2.0 \le \dot {x} \le 2.0\}$被划分为20$\times $20 = 400个小网格,每一个小网格代表一个初值点, 针对每一组系统参数值,计算其在$\varOmega $内400个初值条件下的全局动力学特性,可得系统在参数$\omega $与状态平面$\varOmega$耦合下的全局动力学特性.
图2

图2
不考虑状态平面$\varOmega$时随$\omega $增大的分岔图和TLE谱
Fig. 2
Bifurcation diagram and corresponding TLE spectrum of the system with the increase in $\omega$without considering the state plane $\varOmega $
图3为单参数$\omega $与状态平面$\varOmega$耦合下系统随$\omega $增大的分岔图和相应的TLE谱.图中不同的颜色表示共存的动力学行为或分岔分支,每个分岔分支及其对应的TLE用相同颜色表示,TLE值用来判断解的稳定性或分岔. 对比图2,系统动力学行为和分岔变得较为复杂, 一些潜在的、隐藏的动力学特性,如周期跳跃、 倍化分岔和鞍结分岔以及各种周期行为等被完全揭示. B1点,稳定的周期1运动出现两条分支(灰色和品红色),该周期1运动在一部分初值范围内发生周期跳跃(灰色),而在另一部分初值范围内持续存在并经过一次倍化分岔和逆倍化分岔后在B3点消失(品红色).可见, 分岔点对初值的敏感性引起共存吸引子或多稳态行为.在B1和B3点之间,系统出现2个周期1共存或1个周期1与1个周期2共存的情况,其在状态平面$\varOmega $上的分布特性分别如图4(a)和图4(b)所示,其中"+"和"$\times $"表示Poincaré映射点或吸引子,P1和Q1表示两个不同的周期1行为, Q2表示周期2行为,浅灰色为P1的吸引域, 黑色为Q1或Q2的吸引域,对应相空间轨迹分别如图5(a)和图5(b)所示, 两运动轨迹的振动幅值不同,P1相对较小.
图3
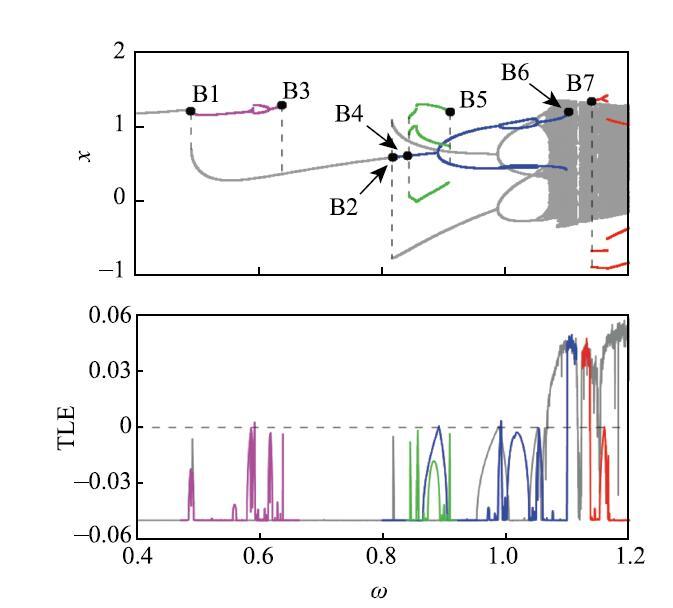
图3
参数$\omega$与状态平面$\varOmega$耦合下的分岔图和TLE
Fig. 3
Bifurcation diagram and corresponding TLE spectrum under coupling of the parameter $\omega$and the state plane $\varOmega$
图4
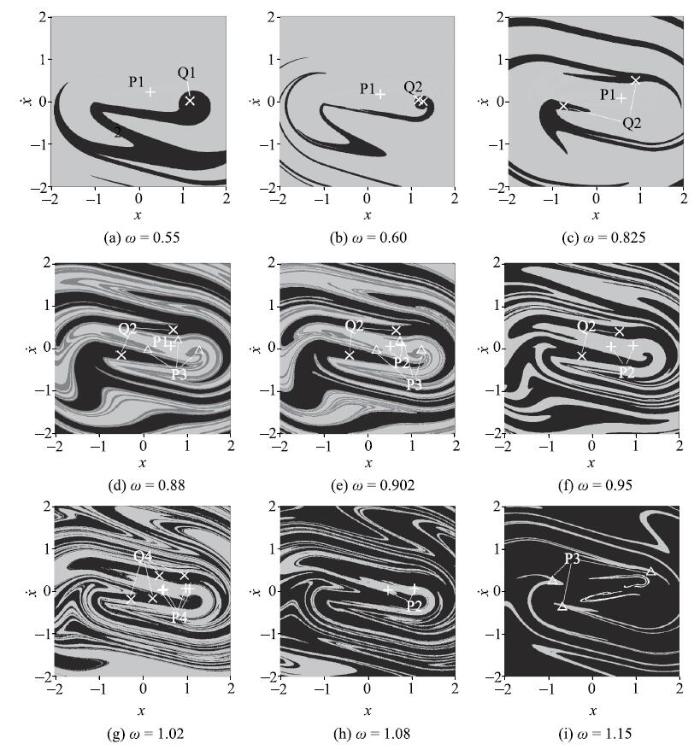
图4
随啮合频率$\omega $增大的吸引域
Fig. 4
Basins of attraction of the system with the increase in $\omega $
图5
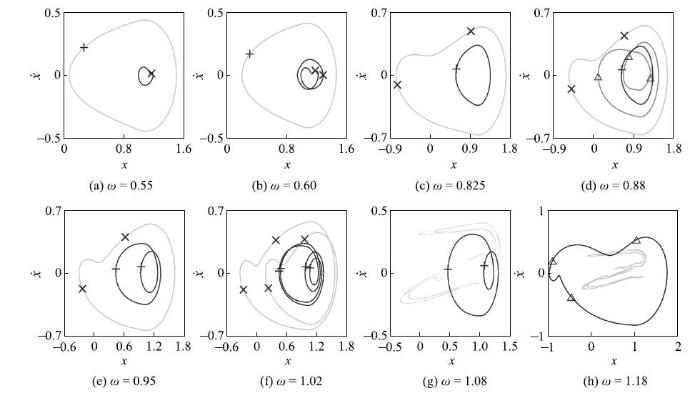
图5
多初值下随$\omega $变化的相图和Poincaré截面图
Fig. 5
Phase portraits and Poincaré maps of the system with the change of $\omega $under multi-initial value
分岔点B4对初值具有敏感性,蓝色周期1运动在部分初值范围内转迁为绿色周期3运动,随后该周期3运动在B5点消失;而在另一部分初值范围内该蓝色周期1运动持续存在,随后经两次倍化分岔转迁为周期4运动, 后经逆倍化分岔退化为周期2运动,最终在B6点消失. 在B4和B5点之间,系统存在1个周期1(P1)、周期2(Q2)和周期3(P3)共存情况,其在状态平面上的分布特性如 图4(d)所示, 图中"$\Delta$"表示周期3吸引子, 浅灰色为P1的吸引域, 深灰色为P3的吸引域,黑色为Q2的吸引域, 对应相轨迹如图5(d)所示.由于蓝色周期1运动发生倍化分岔,在B5点之前较小区域内系统存在2个周期2(P2和Q2)和1个周期3(P3)共存情况,其在状态平面上的分布特性见图4(e), 图中浅灰色表示P2的吸引域,深灰色表示P3的吸引域, 黑色表示Q2的吸引域.
综上所述, 单参数$\omega $与状态平面$\varOmega $耦合下,一些隐藏的分岔点和动力学行为被完全揭示,各种类型的多稳态行为被得到, 分岔点与多稳态行为的共存被发现.
隐藏分岔点对初值的敏感性是引起多稳态行为或共存吸引子的主要原因,如分岔点B1、B2、B4、B7等, 这些分岔点不仅改变了共存吸引子的数量,而且改变了其在状态平面上的分布特性. 此外, 当$\omega$较小时, 系统表现为稳定的周期1行为, 系统全局动力学稳定性较强,随$\omega $增大系统出现了多稳态行为以及混沌,系统全局动力学稳定性变弱.
4 参数平面与状态平面的耦合特性
由3节的分析可知,啮合频率作为一种运动参数对齿轮传动系统的全局动力学特性及其演变规律有重要影响.由于齿侧间隙和综合传递误差是引起齿轮系统非线性振动的主要因素,以系统两个结构参数(齿侧间隙$D$和误差波动幅值$\varepsilon$)和一个运动参数(啮合频率$\omega $)为控制参数,基于第2节方法, 分别研究齿轮传动系统在参数平面$\omega$-D与状态平面$\varOmega $耦合下、参数平面$\omega$-$\varepsilon $与状态平面$\varOmega $耦合下的全局动力学特性.对一个给定的参数平面$\omega $-$D$或$\omega$-$\varepsilon $, 将该参数平面网格划分为1000$\times$1000个小方格, 每一个小网格代表一组参数值.
4.1 参数平面$\omega $-$D$与状态平面$\varOmega$的耦合特性
图6
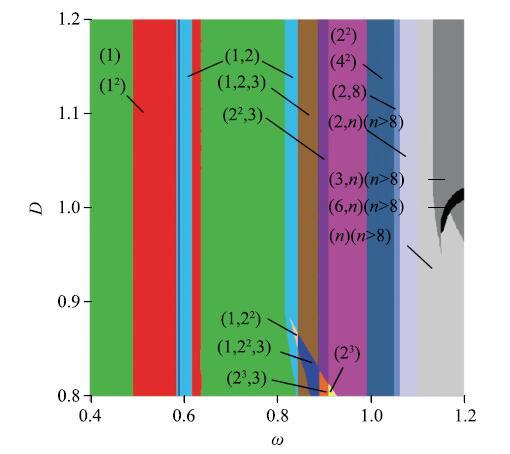
图6
参数平面$\omega $-D与状态平面$\varOmega$耦合下系统多稳态分布图
Fig. 6
Distribution diagram of multi-stable behavior of the system in the parameters plane under coupling of the parameter plane$\omega $-D and the state plane $\varOmega $
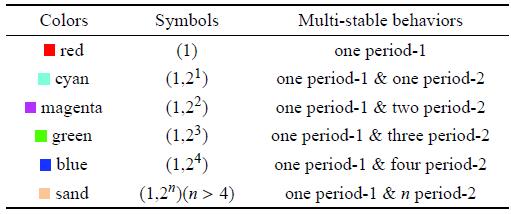
表1
Table 1
 |
图7
当啮合频率较小时, 系统表现为简单的周期1行为或周期1与周期2行为共存,系统的工作性能较为平稳. 当啮合频率较大时,系统存在多种不同类型的周期行为共存以及周期行为与混沌共存,齿轮传动系统动力学行为相对较为复杂.
4.2 参数平面$\omega $-$\varepsilon $与状态平面$\varOmega $的耦合特性
图8
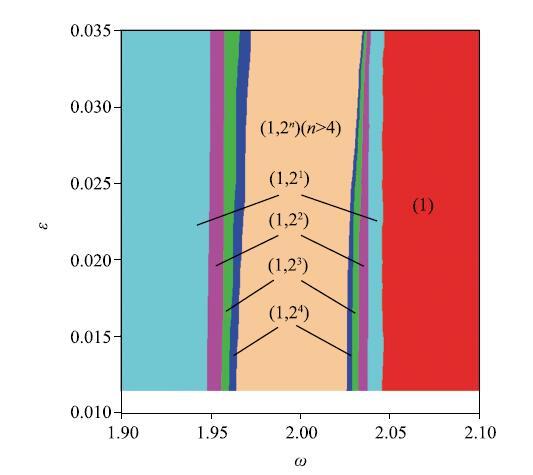
图8
参数平面$\omega-\varepsilon $与状态平面$\varOmega$耦合下系统多稳态分布图
Fig. 8
Distribution diagram of multi-stable behavior of the system in the parameters plane under coupling of the parameter plane$\omega $-$\varepsilon $and the state plane $\varOmega $
表2
Table 2
 |
与图6相似, 在图8中,各种多稳态行为或共存吸引子在参数平面上的存在区域成"带状"分布,当误差波动幅值在较小的范围内扰动时,齿轮传动系统的动力学行为受误差波动幅值变化的影响较小,受啮合频率变化的影响较大. 随啮合频率增大, 参数平面$\omega$-$\varepsilon $上共存周期2行为的数量逐渐增多. 计算发现,当啮合频率在$\omega $= 2.0附近时,共存周期2行为的数量达到最多, 由于其在参数平面$\omega$-$\varepsilon $上存在区域非常小, 而且类型较多,图8没有给出其详细存在区域. 随着啮合频率进一步增大,共存周期2行为的数量开始逐渐减小, 当$\omega $$>$2.05时,周期2行为已全部消失, 参数平面$\omega $-$\varepsilon$上系统只存在一个稳定的周期1行为(红色区域),此时系统全局动力学特性较为简单且稳定.
图9

图9
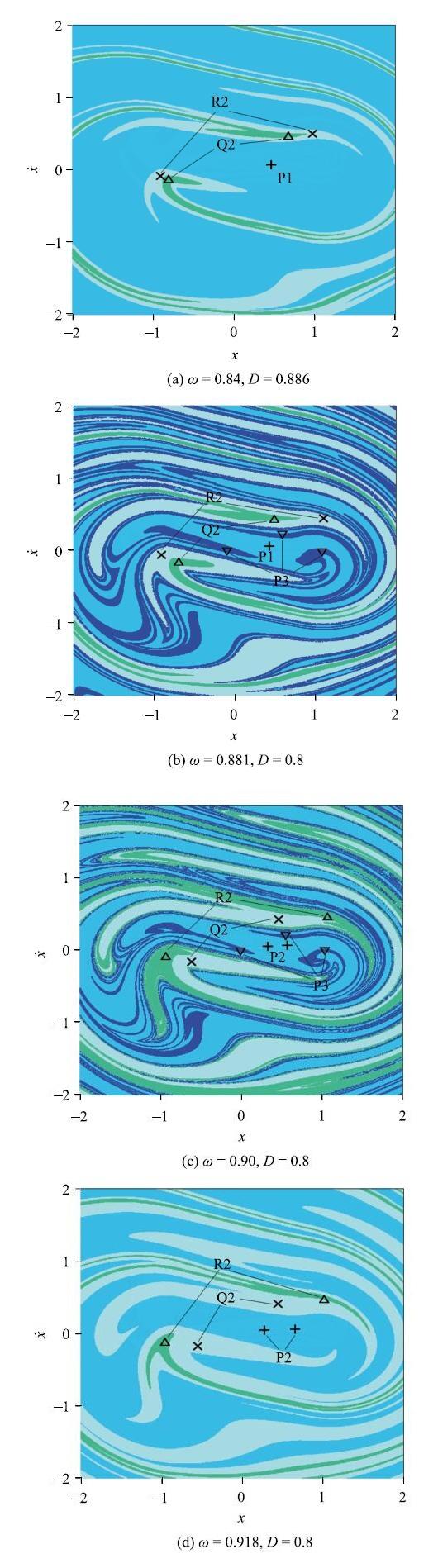
$\varepsilon $= 0.02时随啮合频率$\omega $变化的吸引域
Fig. 9
Basins of attraction of the system with the change of $\omega $
由图9可见, $\omega $= 1.946时, 状态平面$\varOmega$上系统存在1个周期1行为和1个周期2行为, 符号"+"代表周期1的吸引子,其吸引域用红色表示, "$\times $"代表周期2的吸引子,其吸引域用浅灰色表示, 周期2吸引子"$\times$"与周期1吸引子"+"分布在一条直线上, 如图9(a)所示.随$\omega $增大到$\omega $= 1.9505时,如图9(b)所示, 状态平面$\varOmega$上系统存在1个周期1行为和2个周期2行为, "$\Delta$"代表新出现的周期2行为的吸引子, 且与旧的吸引子"$\times$"和"+"分布在一条直线上. 黄色表示新出现周期2吸引子的吸引域,且黄色区域是在红色区域和浅灰色区域的边界处产生,红色区域和浅灰色区域被黄色区域侵蚀, 不同于4.1节的内部侵蚀,我们把这种侵蚀定义为边界侵 蚀(在现有文献中很少见有这种侵蚀方式).随$\omega $继续增大, $\omega $=1.96时(见图9(c)), 状态平面$\varOmega$内系统存在1个周期1行为和3个周期2行为共存, "$\nabla$"代表新出现的周期2行为的吸引子, 且与旧的吸引子"$\times $","+"和"$\Delta $"分布在一条直线上,天蓝色区域为新出现的周期2行为吸引子的吸引域,且在黄色区域和浅灰色区 域的边界处产生, 为边界侵蚀. $\omega$= 1.960 6时(见图9(d)), 状态平面$\varOmega$内系统存在1个周期1行为和4个周期2行为共存(用5不同种颜色区分),黄绿色区域为新出现的 周期2吸引子的吸引域,且在天蓝色区域和浅灰色区域的边界处产生, 为边界侵蚀.计算发现随着共存周期2行为数量的增多, 其相应吸引域面积不断收缩,共存吸引子相互靠近 并挤在一起, 使共存吸引子很难清晰地显示,但所有共存的吸引子分布在一条直线上, 故图9(d)没有具体给出新出现的周期2行为的吸引子, 只给出吸引子的分布位置,如图中线段(下同), 不 同的周期2行为用不同颜色的吸引域区分.$\omega $= 1.960 9时(见图9(e)), 状态平面$\varOmega$内系统存在1个周期1行为和5个周期2行为共存(用6种不同颜色区分),浅粉色 区域为新出现的周期2行为吸引子的吸引域,在黄绿色和浅灰色的边界处产生. $\omega $= 1.975 2时,如图9(f)所示, 在$\varOmega$内系统存在1个周期1行为和10个周期2行为共存(用11种不同颜色区分).随啮合频率增大, 周期2行为的数量不断增多,其在状态平面上吸引域的面积不但缩小, 且具有相似的拓扑结构,限于篇幅, 本文没有给出全部吸引域图.
4.3 研究方法和结果的对比
文献[15,16,17,18,19,20,21]基于Runge-Kutta法数值得到齿轮传动系统在双参数平面上各种动力学行为的存在区域以及分岔曲线,但没有揭示齿轮传动系统在参数平面上可能隐藏的分岔曲线或动力学行为.文献[22-23,26]基于胞映射法揭示了齿轮传动系统在状态空间各共存吸引子的吸引域,但没有分析参数平面上共存吸引子的分布特性.这些文献的研究结果对本文分析结果同样非常重要.本文基于齿轮传动系统多参数和非线性特性,将参数空间和状态空间耦合在一起,基于变步长四阶Runge-Kutta法数值研究了齿轮传动系统在两空间耦合下的全局动力学特性,为系统动力学行为的预测、控制以及更全面地掌握系统运动机理提供理论基础.
5 结论
针对多参数非线性系统,设计了一个计算和辨识参数平面与状态平面耦合下多稳态行为的方法,分别研究了齿轮传动系统在单参数与状态平面耦合下、参数平面与状态平面耦合下的全局动力学特性,揭示了参数平面上多稳态行为的分布特性,以及状态平面上多稳态行为的分布特性, 主要结论如下:
(1)参数平面与状态平面耦合下,齿轮系统在参数平面上可能隐藏的动力学行为和分岔被完全揭示,各种类型多稳态行为的连续存在区域被得到.分岔点或分岔曲线对初值的敏感性是产生多稳态行为的主要原因,如参数平面上不同多稳态行为存在区域的边界曲线.
(2)状态平面上, 多稳态行为的两种不同的侵蚀现象被发现,即内部侵蚀和边界侵蚀.这两种不同的侵蚀现象使齿轮系统多稳态行为和全局动力学特性变得丰富和复杂.
(3)若齿轮系统的齿侧间隙或误差波动幅值在较小范围内扰动,系统的全局动力学特性受间隙或误差变化的影响较小,而受啮合频率变化的影响较大. 当啮合频率较小时,齿轮系统全局动力学特性较为简单且稳定; 随着啮合频率的增大,系统运动特性逐渐失稳, 且全局动力学特性变得复杂.
本文的研究为齿轮传动系统动力学行为的评价和控制、以及系统设计参数的选择具有一定的参考价值,也为其它非线性系统的深入研究提供了一种新的分析思路和方法.
参考文献
Interactions between time-varying mesh stiffness and clearance nonlinearities in a geared system
Dynamic behavior analysis of spur gears with constant & variable excitations considering sliding friction influence
Gear rattle analysis of a torsional system with multi-staged clutch damper in a manual transmission under the wide open throttle condition
Dynamic response of a single-mesh gear system with periodic mesh stiffness and backlash nonlinearity under uncertainty
An analytical study of controlling chaotic dynamics in a spur gear system
间隙对含摩擦和时变刚度的齿轮系统动力学响应的影响
Effect of backlash on dynamics of spur gear pair system with friction and time-varying stiffness
Identification and control of chaos in nonlinear gear dynamic systems using Melnikov analysis
Bifurcation analysis for a two-dimensional delayed discrete-time Hopf field neural network. Chaos,
Multi-stability and complex dynamics in a simple discrete economic model
A bifurcation analysis of a simple electronic circuit
Codimension-two bifurcations analysis and tracking control on a discrete epidemic model
Hunting patterns and bifurcation characteristics of a three-axle locomotive bogie system in the presence of the flange contact nonlinearity
Diversity and transition characteristics of sticking and non-sticking periodic impact motions of periodically forced impact systems with large dissipation
冲击渐进振动系统相邻基本振动的转迁规律
Transition law of adjacent fundamental motions in vibro-impact system eith progression
一类碰撞振动系统在内伊马克沙克--音叉分岔点附近的局部两参数动力学
Local dynamical behavior of two-parameter family near the neimark-sacker-pitchfork bifurcation point in a vibro-impact system
Bifurcation and evolution of a forced and damped Duffing system in two-parameter plane
Saddle-point solution and grazing bifurcation in an impacting system
The effect of codimension-two bifurcation on the global dynamics of a gear model
Dynamic analysis of a planetary gear system with multiple nonlinear parameters
Bifurcation and chaos analysis of spur gear pair in two-parameter plane
齿轮系统参数平面内的分岔结构
Bifurcation structure in parameter plane of gear system
并车螺旋锥齿轮传动动力学参数二维域界结构分析
Two-dimensional domain structure of dynamical parameters of combining spiral gear transmission
Dynamic analysis on torsional vibration of gear-rotor system in two parameters plane
Dynamic Analysis of Planetary Gears With Bearing Clearance
Basins of attraction in non-smooth models of gear rattle
Coexisting periodic orbits in vibro-impacting dynamical systems
双频1: 2激励下修正蔡氏振子两尺度耦合行为
Behaviors of modified Chua's oscillator two time scales under two excitatoins with frequency ratio at 1: 2
离散达芬映射中由边界激变所诱发的复杂的张弛振荡
Complex relaxation oscillation triggered by boundary crisis in the discrete Duffing map
The relationship between chaotic maps and some chaotic systems with hidden attractors
Hopf bifurcation and hidden attractors of a delay-coupled Duffing oscillator
Bifurcation and erosion of safe basin for a spur gear system

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}