引言
现代工程系统中存在着较多的轴向运动结构,如带锯、涂层带钢、发动机传动带、高楼升降机缆绳等. 由于轴速的存在,这些结构在运动过程中会产生不必要的横向振动. 例如,在带锯装置中,刀片的振动会导致工件的加工质量低劣;发动机传送带的横向振动会降低机械传动效率并产生噪声. 轴向运动梁是轴向运动结构中最常见的模型. 长期以来,轴向运动梁的横向非线性振动问题一直是非线性动力学领域的研究热点[1 -4 ] .
Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动.
在上述的轴向运动梁横向参数振动的研究中,轴速和时变张力假设为彼此独立的. 然而根据牛顿第二定律,这显然不够精确. 给轴向张力一个小的周期性变化,必然导致存在非零的加速度,而加速度和张力的关系必须满足牛顿第二定律,由此得到轴向速度与时变张力的关系.
Chen和Tang[23 ] 针对速度的周期性脉动,推出了具有径向变化张力的模型,并且很快这种模型被用来研究Euler梁[24 ] 和Timoshenko梁[25 ] 的参数共振. Yan等[26 ] 分别研究了轴向加速运动黏弹性Euler梁的参数共振和内共振,以及Timoshenko梁的稳态周期响应和混沌行为[27 ] . Ding等[28 ] 研究了超临界轴向加速黏弹性梁的分岔和混沌. 张登博等[29 ] 研究了非齐次边界条件下轴向运动梁的次谐波参数共振.
本文研究了轴向变速运动黏弹性梁的非线性振动. 基于时变张力与轴向加速度之间的关系,研究了系统在次谐波参数共振下随平均轴速、张力摄动幅值、张力摄动频率以及黏弹性系数变化的倍周期分岔及混沌. 运用非线性动力学时间序列分析方法,分析了轴向变速运动梁参激振动的动力学行为.
1 控制方程
本文仅考虑轴向运动梁的横向振动. 黏弹性本构关系取物质时间导数,并考虑黏性阻尼,引入径向变化的轴力,无量纲化的控制方程为[30 ]
(1) $ v,_{tt} + 2\gamma v,_{xt} + \left( {\gamma ^2-x\dot {\gamma }-1} \right)v,_{xx} + k_{f}^2 v,_{xxxx} + \\ \qquad \varepsilon c_{d} \left( {v,_t + \gamma v,_x } \right) +\varepsilon \alpha \left( {v,_{xxxxt} + \gamma v,_{xxxxx} } \right) -\\ \qquad \dfrac {1}{2}\varepsilon k_{N}^2 v,_{xx} \int_0^1 {v,_x^2 dx} = 0 $
式中,$v(x,t)$表示梁在$t$时刻轴向坐标$x$处的横向位移, $\gamma $ 表示梁的轴速,$k_{ f}$表示梁的刚度系数, $\alpha $ 表示黏弹性系数,$c_{d}$表示黏性阻尼系数,$k_{N}$表示梁的非线性系数. $\varepsilon $ 表示一个无量纲参数,表征黏弹性系数和黏性阻尼均为小量. 其中,下标中的逗号表示对其后面的变量的偏微分.
根据周期变化的张力,当横坐标$x$为零时,轴力为初始轴向张力$P_{0}$;横坐标$x$为轴长$L$时,轴力为$P= P_{0}+P_{1}\cos \omega t$,其中$P_{1}$为摄动张力. 初始条件为$t =0$,轴速为 $\varGamma = \varGamma_{0}$,其中, $\varGamma_{0}$为平均轴速. 建立轴向张力和轴向速度之间的关系,可以导出系统的无量纲化的轴速表达式为[30 ]
(2) $$ \gamma = \gamma _0 + \dfrac {\varepsilon }{\omega }p_1 \sin \left( {\omega t} \right) $$
式中, $\gamma_{0}$表示梁的轴向平均速度,$\omega$表示张力摄动频率,$p_{1}$表示张力摄动幅值. 将式(2)代入方程(1),并忽略$O(\varepsilon ^{2})$的高阶项,可得到时变张力作用下轴向运动梁的控制方程的最终形式
(3) $ v,_{tt} + 2\left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]v,_{xt} + \alpha \left( {v,_{xxxxt} + \gamma _0 v,_{xxxxx} } \right) + \\ \qquad k_f^2 v,_{xxxx} +\left[ {\gamma _0^2 + 2\gamma _0 \dfrac {p_1 }{\omega }\sin \left({\omega t} \right)} \right]v,_{xx}- \\ \qquad \left[ {1 + xp_1 \cos \left( {\omega t} \right)} \right]v,_{xx}+ \\ \qquad c_{d} \left\{ {v,_t + \left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]v,_x } \right\} - \\ \qquad \dfrac {1}{2}k_{N}^2 v,_{xx} \int_0^1 {v,_x^2 dx} = 0 $
(4) $$ v\left( {0,t} \right) = v\left( {1,t} \right) = v,_{xx} \left( {0,t} \right) = v,_{xx} \left( {1,t} \right) = 0 $$
2 Galerkin截断
对于轴向运动黏弹性梁的控制方程(3),本文将采用Galerkin截断方法并结合Runge-Kutta方法进行数值求解. Galerkin方法是一种有效处理非线性连续体问题的数值方法. 其实质是选取有限多项试函数叠加,再要求结果在求解域内及边界上的加权积分满足原方程,便可得到一组便于求解的常微分方程.
假设梁的控制方程的横向振动位移变量满足下式 $$ v\left( {x,t} \right) = \sum_{n = 1}^{ N} {q_n \left( t \right)\sin \left( {n\pi x} \right)} (5) $$
(6) $$ \left. v,_t = \sum_{n = 1}^{N} {\dot {q}_n } \sin \left( {n\pi x} \right) , \ \ v,_x = \sum_{n = 1}^{N} {q_n } n\pi \cos \left( {n\pi x} \right) \\ v,_{tt} = \sum_{n = 1}^{N} {\ddot {q}_n } \sin \left( {n\pi x} \right) , \ \ v,_{xt} = \sum_{n = 1}^{N} {\dot {q}_n } n\pi \cos \left( {n\pi x} \right) \\ v,_{xx} = \sum_{n = 1}^{N} {q_n } \left( {-n^2\pi ^2} \right)\sin \left( {n\pi x} \right) \\ v,_{xxxx} = \sum_{n = 1}^{N} {q_n } \left( {n^4\pi ^4} \right)\sin \left( {n\pi x} \right) \\ v,_{xxxxt} = \sum_{n = 1}^{N} {\dot {q}_n } \left( {n^4\pi ^4} \right)\sin \left( {n\pi x} \right) \\ v,_{xxxxx} = \sum_{n = 1}^{N} {q_n } \left( {n^5\pi ^5} \right)\cos \left( {n\pi x} \right) \!\!\right\} $$
(7) $$ \int_0^1 {v,_x^2 dx} = \int_0^1 {\sum_{n = 1}^{N} {q_n n\pi \cos \left( {n\pi x} \right)^2} d x} = \\ \qquad \dfrac {1}{2}\sum_{n = 1}^{N} {q_n ^2n^2\pi ^2} $$
上标中的点表示对时间$t$的求导. 将式(6)和式(7)代入方程(3),并令其为$R_{N}(x, t)$, 可得
(8) $ R_{N} \left( {x,t} \right) = \sum_{n = 1}^{N} {\ddot {q}_n } \sin \left( {n\pi x} \right) + 2\left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right] \cdot \\ \qquad \sum_{n = 1}^{N} {\dot {q}_n } n\pi \cos \left( {n\pi x} \right) + \alpha \left[ {\sum_{n = 1}^{N} {\dot {q}_n } \left( {n^4\pi ^4} \right)\sin \left( {n\pi x} \right)} \right.+ \\ \qquad \left. { \gamma _0 \sum_{n = 1}^{N} {q_n } \left( {n^5\pi ^5} \right)\cos \left( {n\pi x} \right)} \right] + \\ \qquad k_{f}^2 \sum_{n = 1}^{N} {q_n } \left( {n^4\pi ^4} \right)\sin \left( {n\pi x} \right) + \\ \qquad \left[ {\gamma _0^2 + 2\gamma _0 \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]\sum_{n = 1}^{N} {q_n } \left( {-n^2\pi ^2} \right)\sin \left( {n\pi x} \right)- \\ \qquad \left[ {1 + xp_1 \cos \left( {\omega t} \right)} \right]\sum_{n = 1}^{ N} {q_n } \left( {-n^2\pi ^2} \right)\sin \left( {n\pi x} \right) + \\ \qquad c_d \left\{ {\sum_{n = 1}^{N} {\dot {q}_n } \sin \left( {n\pi x} \right) +\left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]}\right. \cdot \\ \qquad \left.{\sum_{n = 1}^{ N} {q_n } n\pi \cos \left( {n\pi x} \right)} \right\}- \dfrac {1}{4}k_{ N}^2 \sum_{n = 1}^{ N} {q_n } \left( {-n^2\pi ^2} \right)\cdot \\ \qquad \sin \left( {n\pi x} \right)\sum_{n = 1}^{N} {q_n ^2n^2\pi ^2} = 0 $
取静态线弹性梁的特征函数为权函数,并按位移在区间[0 ,1 ] 内积分. 则$R_{N}$应满足以下关系
(9) $$ \int_0^1 {R_{N} \left( {x,t} \right)} \sin \left( {n\pi x} \right)dx = 0 , \ \ n = 1,2,\cdots,{ N} $$
将$R_{N}$代入等式(8),即可实现对控制方程的$N$阶Galerkin截断,使控制方程离散为$N$个二阶常微分方程组
(10) $$ \ddot {q}_n-\left[ {\gamma _0^2 + 2\gamma _0 \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)-1-\dfrac {p_1 }{2}\cos \left( {\omega t} \right)} \right]n^2\pi ^2q_n +\\ \qquad k_{f}^2 n^4\pi ^4q_n + \dfrac {1}{4}k_{ N}^2 n^2\pi ^4q_n \sum_{m = 1}^{N} {m^2q_m ^2} -\\ \qquad \sum_{m = 1,m\cong n}^{N} {\dfrac {4mn\left[ {1-\left( {-1} \right)^{m + n}} \right]}{m^2-n^2}\left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]} \dot {q}_m +\ \qquad \sum_{m = 1,m\cong n}^{N} m^2\left[ {\dfrac {\left( {-1} \right)^{m + n}-1}{\left( {m-n} \right)^2} + \dfrac {1-\left( {-1} \right)^{m + n}}{\left( {m + n} \right)^2}} \right]\cdot \\ \qquad p_1 \cos \left( {\omega t} \right)q_m +\\ \qquad \alpha \left\{ {n^4\pi ^4\dot {q}_n-2\pi ^4\gamma _0 \sum_{m = 1,m\cong n}^{N} {\dfrac {nm^5\left[ {1-\left( {-1} \right)^{m + n}} \right]}{m^2-n^2}q_m } } \right\} +\\ \qquad c_{\d} \left\{ {\dot {q}_n-2\left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right] }\right.\cdot \\ \qquad \left.{ \sum_{m = 1,m\cong n}^{N} {\dfrac {mn\left[ {1-\left( {-1} \right)^{m + n}} \right]}{m^2-n^2}q_m } } \right\} = 0 $$
Runge-Kutta方法是求解非线性常微分方程的经典方法,可求解离散化后的常微分方程组(10). 在此,假定初始条件为
(11) $$ q_n \left( t \right) = 0.001 , \ \ \dot {q}_n \left( t \right) = 0.001 , \ \ n = 1,2,\cdots,{ N} $$
截断阶数$N$通常选取为偶数,本文中取$N=4$,方程(10)可整理为
(12a) $ \ddot {q}_1-\pi ^2q_1 \left[ {\gamma _0^2 + 2\gamma _0 \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)-1-\dfrac {p_1 }{2}\cos \left( {\omega t} \right)} \right] + \\ \qquad k_f^2 \pi ^4q_1 + k_{ N}^2 \pi ^4q_1 \left( {\dfrac {1}{4}q_1 ^2 + q_2 ^2 + \dfrac {9}{4}q_3 ^2 + 4q_4 ^2} \right) - \\ \qquad \left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]\left( {\dfrac {16}{3}\dot {q}_2 + \dfrac {32}{15}\dot {q}_4 } \right)+ \\ \qquad p_1 \cos \left( {\omega t} \right)\left( {\dfrac {64}{9}q_2 + \dfrac {512}{225}q_4 } \right)+ \\ \qquad \alpha \pi ^4\left( {\dot {q}_1-\dfrac {128}{3}\gamma _0 q_2 + \dfrac {4096}{15}\gamma _0 q_4 } \right)+ \\ \qquad c_{d} \left\{ {\dot {q}_1-\left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]\left( {\dfrac {8}{3}q_2 + \dfrac {16}{15}q_4 } \right)} \right\} = 0 $
(12b) $ \ddot {q}_2-4\pi ^2q_1 \left[ {\gamma _0^2 + 2\gamma _0 \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)-1-\dfrac {p_1 }{2}\cos \left( {\omega t} \right)} \right] + \\ \qquad 16k_{f}^2 \pi ^4q_2 + k_{ N}^2 \pi ^4q_2 \left( {q_1 ^2 + 4q_2 ^2 + 9q_3 ^2 + 16q_4 ^2} \right) - \\ \qquad \left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]\left( {-\dfrac {16}{3}\dot {q}_1 + \dfrac {48}{5}\dot {q}_3 } \right) - \\ \qquad p_1 \cos \left( {\omega t} \right)\left( {\dfrac {16}{9}q_1 + \dfrac {432}{25}q_3 } \right) + \\ \qquad \alpha \pi ^4\left( {16\dot {q}_2 + \dfrac {8}{3}\gamma _0 q_1-\dfrac {1944}{5}\gamma _0 q_3 } \right) + \\ \qquad c_{\d} \left\{ {\dot {q}_2 + \left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]\left( {\dfrac {8}{3}q_1-\dfrac {24}{5}q_3 } \right)} \right\} = 0 $
(12c) $ \ddot {q}_3-9\pi ^2q_3 \left[ {\gamma _0^2 + 2\gamma _0 \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)-1-\dfrac {p_1 }{2}\cos \left( {\omega t} \right)} \right]+ \\ \qquad 81k_{f}^2 \pi ^4q_3 + k_{ N}^2 \pi ^4q_3 \left( {\dfrac {9}{4}q_1 ^2 + 9q_2 ^2 + \dfrac {81}{4}q_3 ^2 + 36q_4 ^2} \right) - \\ \qquad \left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]\left( {-\dfrac {48}{5}\dot {q}_2 + \dfrac {96}{7}\dot {q}_4 } \right) - \\ \qquad p_1 \cos \left( {\omega t} \right)\left( {\dfrac {192}{25}q_2 + \dfrac {1536}{49}q_4 } \right) + \\ \qquad \alpha \pi ^4\left( {81\dot {q}_3 + \dfrac {384}{5}\gamma _0 q_2-\dfrac {12288}{7}\gamma _0 q_4 } \right) + \\ \qquad c_{\d} \left\{ {\dot {q}_3 + \left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]\left( {\dfrac {24}{5}q_2-\dfrac {48}{7}q_4 } \right)} \right\} = 0 $
(12d) $ \ddot {q}_4-16\pi ^2q_4 \left[ {\gamma _0^2 + 2\gamma _0 \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)-1-\dfrac {p_1 }{2}\cos \left( {\omega t} \right)} \right] + \\ \qquad 256k_f^2 \pi ^4q_4 + k_{ N}^2 \pi ^4q_4 \left( {4q_1 ^2 + 16q_2 ^2 + 36q_3 ^2 + 64q_4 ^2} \right) + \\ \qquad \left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]\left( {\dfrac {32}{15}\dot {q}_1 + \dfrac {96}{7}\dot {q}_3 } \right) - \qquad p_1 \cos \left( {\omega t} \right)\left( {\dfrac {32}{225}q_1 + \dfrac {864}{49}q_3 } \right) + \\ \qquad \alpha \pi ^4\left( {256\dot {q}_4 + \dfrac {16}{15}\gamma _0 q_1 + \dfrac {3888}{7}\gamma _0 q_3 } \right) + \\ \qquad c_{d} \left\{ {\dot {q}_4 + \left[ {\gamma _0 + \dfrac {p_1 }{\omega }\sin \left( {\omega t} \right)} \right]\left( {\dfrac {16}{15}q_1 + \dfrac {48}{7}q_3 } \right)} \right\} = 0 $
(13a) $ v\left( {0.5,t} \right) = \sum_{n = 1}^4 {q_n \left( t \right)\sin \left( {0.5\pi x} \right)} = q_1 \left( t \right)-q_3 \left( t \right) $
(13b) $ v,_t \left( {0.5,t} \right) = \sum_{n = 1}^4 {\dot {q}_n \left( t \right)\sin \left( {0.5\pi x} \right)} = \dot {q}_1 \left( t \right)-\dot {q}_3 \left( t \right) $
3 数值仿真
本文的数值仿真计算中,给定$L=1.0$ m, $E=30$ GPa, $A=0.04\times 0.03$ m$^{2}$, $\rho =7 680$ kg/m$^{3}$和$P_{0}=6.75\times 10^{4}$ N,解得相应的无量纲参数$k_{ N}=23.0940$,$k_{f}=0.2$. 并计算得无量纲临界速度的值为1.181 0. 考虑$p_{1}=0.5$,$\gamma_{0}=1.15$,$\alpha =0.000 1$,$ c_{ d}=0.001$. 选取张力摄动频率为次谐波共振的频率即$\omega=2\omega_{1}$, $\omega_{1}$为系统线性自由振动的第一阶固有频率, 故$\omega=1.268 3$[30 ] . 无量纲张力摄动幅值的周期$T=2\pi /\omega$,在四阶Runge-Kutta方法的数值计算中,时间步长取为$T/1000$.
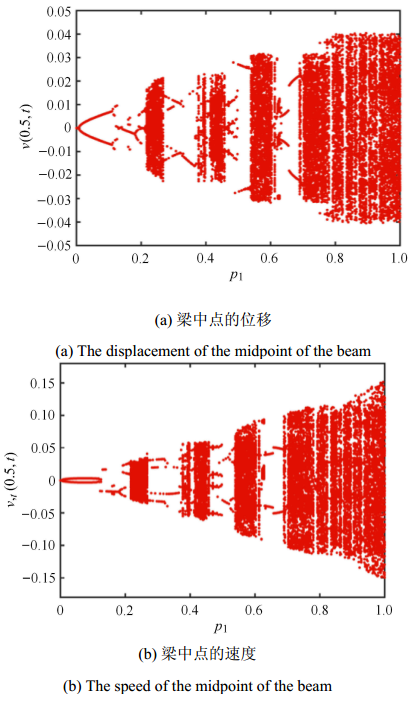
图1 显示了随着张力摄动幅值的变化,轴向运动梁中点的位移和速度出现的倍周期混沌运动现象. 无量纲扰动张力幅值$p_{1}$的变化步长取为0.002 5,仿真计算的无量纲时间总长度取为1000$T$,为消除瞬态的影响,仅显示最后80$T$的位移和速度. 当扰动张力为0.007 5时,梁进入二倍周期运动;扰动张力为0.217 5时起,梁发生混沌运动与倍周期分岔运动交替出现;随着扰动张力的增大,周期窗口不断缩短;在0.690 0至1之间,梁基本处于混沌运动状态,仅出现极短暂的周期窗口. 梁中点的位移和速度随着扰动张力的增大而不断增大. 随着扰动张力的增大,运动梁进入混沌运动的敏感性提高,最终基本不再出现周期运动.
图1
图1
沿张力摄动幅值出现的倍周期分岔图
Fig. 1
The bifurcation diagram with double periods along the tensional perturbation amplitude
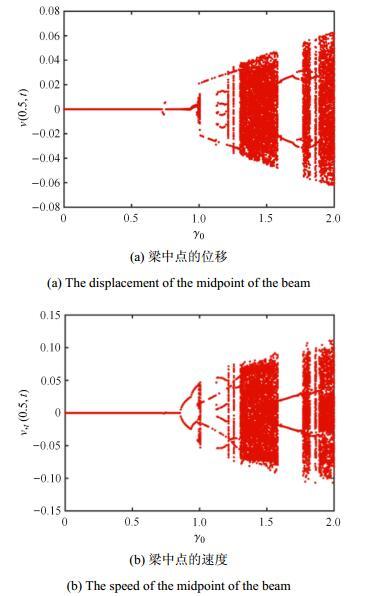
图2 显示了随着平均速度的变化,轴向运动梁中点的位移和速度出现的倍周期混沌运动现象.
图2
图2
沿轴向平均速度出现的倍周期分岔图
Fig. 2
The bifurcation diagram with double periods along the average axis velocities
仿真计算中,无量纲平均速度$\gamma_{0}$的变化步长取为0.005. 在平均速度变化开始的较长范围内,梁一直处于稳定平衡点状态,在0.730处出现单倍周期运动;在0.800处之后呈现单倍、多倍的周期运动,直至进入周期与混沌间歇呈现的现象. 由图可知,梁中点的位移和速度随着平均速度的增大而不断增大. 结果表明,在轴向平均速度较小时,轴向运动梁基本处于平衡状态.
图3 显示了随着黏弹性系数的变化,运动梁中点的位移和速度出现的倍周期分岔特征. 仿真计算中,无量纲黏弹性系数$\alpha $的变化步长取为0.000 01. 由图可知,系统的位移和速度随着黏弹性系数的增大而明显减小,并且呈现倒分岔的现象. 黏弹性系数较小时,梁保持多倍周期运动. 当黏弹性系数为0.000 23至0.001 43时,梁发生混沌-二倍周期-混沌-二倍周期的运动过程;当黏弹性系数为0.001 43至0.003 25时,梁处于单倍周期运动;黏弹性系数大于0.003 25后,梁一直保持稳定平衡点状态.
结果表明,梁黏弹性系数增大到一定值时,系统进入稳定状态.
图3
图3
沿黏弹性系数出现的倍周期分岔图
Fig. 3
The bifurcation diagram with double periods along the viscoelastic coefficient
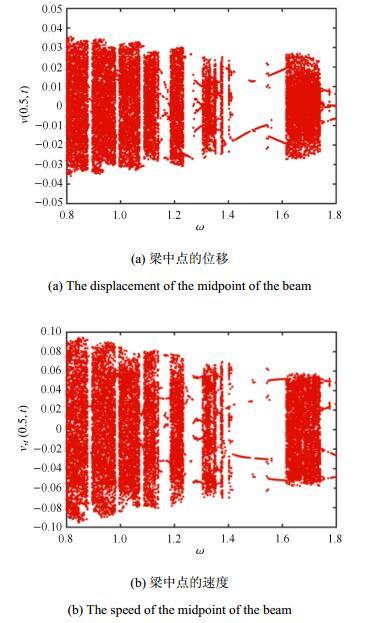
图4 显示了随着张力摄动频率的变化,运动梁中点的位移和速度出现的倍周期分岔特征. 仿真计算中,无量纲张力摄动频率$\omega$的变化步长取为0.002 5. 由图可得,当张力摄动频率在0.800 0至1.237 5之间,运动梁容易处于混沌状态;张力摄动频率在1.237 5至1.612 5时, 运动梁趋于稳定周期状态. 观察整体可知,梁中点的位移和速度幅值随着张力摄动频率的增大而缓慢减小. 结果可得,在次谐波共振频率附近,当张力摄动频率较小时,轴向运动梁容易发生混沌行为,仅出现短暂的周期窗口.
图4
图4
沿张力摄动频率出现的倍周期分岔图
Fig. 4
The bifurcation diagram with double periods along the tensional perturbation frequency
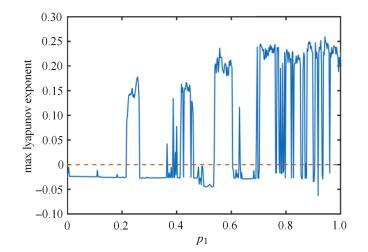
在非线性系统中,李雅普诺夫指数是一种识别混沌运动的定量分析方法. 最大李雅普诺夫指数为正,表示系统处于混沌状态;为负则表示为周期运动. 本文利用微分方程的数值解计算梁随着参数$p_{1}$变化的最大李雅普诺夫指数,采用柏内庭(Benettin)法[31 ] 的轨道微 扰原理计算系统的最大李雅普诺夫指数. 取相轨线的初始条件为$q_{n}=0.001$, $\dot{q}_n=0$ ($n=1, 2, 3, 4$). 相邻相轨线的初始条件为$q_{1}=0.001+10^{-7}$, $ q_{2}=q_{3}=q_{4}=0.001$, $\dot{q}_n=0$ ($n=1,2,3,4$). 仿真计算中选取5000$T$至5001$T$的数值解作为循环中的初始条件的值. 为得出准确有效的结果,计算中循环1000个$T$,并取最后500个最大李雅普诺夫指数值的平均数作为最终值. 观察图5 与图1 可知,系统的最大李雅普诺夫指数与分岔图有很好的吻合. 随着张力摄动幅值$p_{1}$的增大,正的最大李雅普诺夫指数的值整体也在增大,表明系统的混乱程度不断增加.
其中图6 给出了无量纲扰动张力$p_{1} =0.25$时,梁中点运动的时间历程图、频谱图、相图和Poincaré映射图. 仿真的无量纲时间长度为1000$T$,图6 (a)时程图中仅绘出总时间历程的最后100个无量纲时间的振动位移点. 观察图6 (b)频谱图,其包含无限个连续的频率. 图6 (c)相图中仅绘制了最后30$T$的振动位移和速度的数值解. 仿真计算中,每隔一个$T$取一个值绘制图6 (d) Poincaré 映射图,观察可知其由无数个具有精细自分形结构的点构成. 由以上分析可知,运动梁此时进入混沌运动状态.
图5
图5
沿张力摄动幅值变化的系统最大Lyapunov指数
Fig. 5
The maximum Lyapunov exponent of a system along the varies of the tensional perturbation amplitude
图6
图6
梁中点的运动:混沌运动
Fig. 6
The motion of midpoint of beam: chaotic motion
4 结论
本文通过四阶Galerkin截断方法,研究了引入时变张力与轴向加速度的关系下轴向变速运动黏弹性梁横向非线性振动的分岔与混沌. 运用非线性动力学时间序列分析法,通过Poincaré映射,观察到轴向运动梁随张力摄动幅值以及平均速度幅值等参数变化的倍周期分岔现象. 分别通过时程图、频谱分析、相图、Poincaré映射以及最大李雅普诺夫指数的角度识别系统中存在的典型倍周期分岔与混沌的运动形态. 研究发现:在次谐波参数共振下,当接近临界速度时,轴向变速梁的横向振动响应对张力摄动幅值以及张力摄动频率的变化尤为敏感, 频繁呈现倍周期分岔与混沌的交替运动. 张力摄动幅值的增大会导致运动梁的响应幅值迅速增大并出现混沌运动. 轴向平均速度的减小有助于运动梁保持稳定平衡点状态. 黏弹性系数的增大对梁的稳态周期运动有很好的影响.
参考文献
View Option
[1]
Pellicano F Vestroni F . Nonlinear dynamics and bifurcations of an axially moving beam
Journal of Vibration and Acoustics , 2000 ,122 (1 ):21 -30
DOI
URL
[本文引用: 2]
[2]
Wang J Li Q . Active vibration control methods of axially moving materials -a review
Journal of Vibration and Control , 2004 ,10 (4 ):475 -491
DOI
URL
[3]
丁虎 , 陈立群 , 张国策 . 轴向运动梁横向非线性振动模型研究进展
动力学与控制学报 , 2013 ,11 (1 ):20 -30
( Ding Hu Chen Liqun Zhang Guoce . Advances in nonlinear models for transverse vibration of axially moving beams
Journal of Dynamics and Control , 2013 ,11 (1 ):20 -30 (in Chinese))
[4]
陈荣泉 , 余小刚 . 轴向运动体系横向振动控制的研究进展
机电技术 , 2017 (4 ):117 -120
[本文引用: 1]
( Chen Rongquan Yu Xiaogang . Advances in control of transverse vibration of axially moving system
Journal of Mechanical and Electrical Technology , 2017 (4 ):117 -120 (in Chinese))
[本文引用: 1]
[5]
Ghayesh MH Farokhi H . Nonlinear dynamical behavior of axially accelerating beams: Three-dimensional analysis
Journal of Computational and Nonlinear Dynamics , 2016 ,11 (1 ):355 -373
[本文引用: 1]
[6]
Ghayesh MH Amabili M . Three-dimensional nonlinear planar dynamics of an axially moving Timoshenko beam
Archive of Applied Mechanics , 2013 ,83 (4 ):591 -604
DOI
URL
[本文引用: 1]
[7]
Huang JS Fung RF Lin CH . Dynamic stability of a moving string undergoing three-dimensional vibration
International Journal of Mechanical Sciences , 1995 ,37 (2 ):145 -160
DOI
URL
[本文引用: 1]
[8]
Sahoo B Panda LN Pohit G . Parametric and internal resonances of an axially moving beam with time-dependent velocity
Modelling and Simulation in Engineering , 2013 ,2013 :1 -18
[本文引用: 1]
[9]
Sahoo B Panda LN Pohit G . Stability and bifurcation analysis of an axially accelerating beam
Vibration Engineering and Technology of Machinery , 2014 ,23 :915 -928
[本文引用: 1]
[10]
李怡 , 严巧赟 , 丁虎 等 . 轴向运动三参数黏弹性梁的分岔与混沌
上海大学学报(自然科学版) , 2018 ,24 (5 ):713 -720
[本文引用: 1]
( Li Yi Yan Qiaoyun Ding Hu , et al . Bifurcation and chaos of axially moving viscoelastic beam constituted by standard linear solid model
Journal of Shanghai University (Natural Science) , 2018 ,24 (5 ):713 -720 (in Chinese))
[本文引用: 1]
[11]
Wang YB Ding H Chen LQ . Nonlinear vibration of axially accelerating hyperelastic beams.
International Journal of Non-Linear Mechanics , 2018 ,99 :302 -310
DOI
URL
[本文引用: 1]
[12]
胡璐 , 闫寒 , 张文明 等 . 黏性流体环境下V型悬臂梁结构流固耦合振动特性研究
力学学报 , 2018 ,50 (3 ):643 -653
[本文引用: 1]
( Hu Lu Yan Han Zhang Wenming , et al . Analysis of flexural vibration of V-shaped beams immersed in viscous fluids
Chinese Journal of Theoretical and Applied Mechanics , 2018 ,50 (3 ):643 -653 (in Chinese))
[本文引用: 1]
[13]
高晨彤 , 黎亮 , 章定国 等 . 考虑剪切效应的旋转FGM楔形梁刚柔耦合动力学建模与仿真
力学学报 , 2018 ,50 (3 ):654 -666
[本文引用: 1]
( Gao Chentong Li Liang Zhang Dingguo , et al . Dynamic modeling and simulation of rotating FGM tapered beams with shear effect
Chinese Journal of Theoretical and Applied Mechanics , 2018 ,50 (3 ):654 -666 (in Chinese))
[本文引用: 1]
[14]
杨晓东 , 唐有绮 , 戈新生 . 轴向运动Timoshenko梁固有频率的求解方法研究
机械强度 , 2009 ,31 (2 ):208 -210
[本文引用: 1]
( Yang Xiaodong Tang Youqi Ge Xinsheng . Natural frequency analysis of axially moving, simply supported Timoshenko beam
Journal of Mechanical Strength , 2009 ,31 (2 ):208 -210 (in Chinese))
[本文引用: 1]
[15]
Kapitaniak T Marynowski K . Zener internal damping in modelling of axially moving viscoelastic beam with time-dependent tension.
International Journal of Non-Linear Mechanics , 2007 ,42 (1 ):118 -131
DOI
URL
[本文引用: 1]
[16]
李海涛 , 秦卫阳 , 田瑞兰 . 随机及移动荷载激励下弹性梁分岔与混沌
动力学与控制学报 , 2015 ,13 (6 ):418 -423
[本文引用: 1]
( Li Haitao Qin Weiyang Tian Ruilan . Bifurcation and chaos of beam subjected to moving loads and random excitations
Journal of Dynamics and Control , 2015 ,13 (6 ):418 -423 (in Chinese))
[本文引用: 1]
[17]
谭霞 , 丁虎 , 陈立群 . 超临界轴向运动Timoshenko梁横向受迫振动
振动与冲击 , 2017 ,36 (22 ):1 -5
[本文引用: 1]
( Tan Xia Ding Hu Chen Liqun . Transverse forced vibration of an axially moving Timoshenko beam at a supercritical speed
Journal of Vibration and Shock , 2017 ,36 (22 ):1 -5 (in Chinese))
[本文引用: 1]
[18]
Farokhi H Ghayesh MH Gholipour A , et al . Motion characteristics of bilayered extensible Timoshenko microbeams
International Journal of Engineering Science , 2017 ,112 (2017 ):1 -17
DOI
URL
[本文引用: 1]
[19]
赵小颖 , 李彪 , 丁虎 等 . 中间约束轴向运动梁横向非线性振动
振动与冲击 , 2019 , 38 (5 ):142 -145-168
[本文引用: 1]
( Zhao Xiaoying Li Biao Ding Hu , et al . Nonlinear transverse vibration of an axially moving beam with an intermediate spring constraint
Journal of Vibration and Shock , 2019 , 38 (5 ):142 -145-168 (in Chinese))
[本文引用: 1]
[20]
华洪良 , 廖振强 , 张相炎 . 轴向移动悬臂梁高效动力学建模及频率响应分析
力学学报 , 2017 ,49 (6 ):1390 -1398
[本文引用: 1]
( Hua hongliang Liao Zhenqiang Zhang Xiangyan . An efficient dynamic modeling method of an axially moving cantilever beam and frequency response analysis
Chinese Journal of Theoretical and Applied Mechanics , 2017 ,49 (6 ):1390 -1398 (in Chinese))
[本文引用: 1]
[21]
Ghayesh MH . Resonant dynamics of axially functionally graded imperfect tapered Timoshenko beams
Journal of Vibration and Control , 2019 ,25 (2 ):336 -350
DOI
URL
[本文引用: 1]
[22]
Ghayesh MH . Resonant vibrations of FG viscoelastic imperfect Timoshenko beams
Journal of Vibration and Control , 2019 : 1077546318825167
[本文引用: 1]
[23]
Chen LQ Tang YQ . Parametric stability of axially accelerating viscoelastic beams with the recognition of longitudinally varying tensions
Journal of Vibration and Acoustics , 2012 ,134 (1 ):1 -11
[本文引用: 1]
[24]
Chen LQ Tang YQ . Combination and principal parametric resonances of axially accelerating viscoelastic beams: Recognition of longitudinally varying tensions
Journal of Sound and Vibration , 2011 ,330 (23 ):5598 -5614
DOI
URL
[本文引用: 1]
[25]
Tang YQ Chen LQ Zhang HJ , et al . Stability of axially accelerating viscoelastic Timoshenko beams: Recognition of longitudinally varying tensions
Mechanism and Machine Theory , 2013 ,62 :31 -50
DOI
URL
[本文引用: 1]
[26]
Yan QY Ding H Chen LQ . Nonlinear dynamics of axially moving viscoelastic Timoshenko beam under parametric and external excitations
Applied Mathematics and Mechanics , 2015 ,36 (8 ):971 -984
DOI
URL
[本文引用: 1]
[27]
Yan QY Ding H Chen LQ . Periodic responses and chaotic behaviors of an axially accelerating viscoelastic Timoshenko beam
Nonlinear Dynamics , 2014 ,78 (2 ):1577 -1591
DOI
URL
[本文引用: 1]
[28]
Ding H Yan QY Zu JW . Chaotic dynamics of an axially accelerating viscoelastic beam in the supercritical regime
International Journal of Bifurcation and Chaos , 2014 ,24 (5 ):1450062
DOI
URL
[本文引用: 1]
[29]
张登博 , 唐有绮 , 陈立群 . 非齐次边界条件下轴向运动梁的非线性振动
力学学报 , 2019 ,51 (1 ):218 -227
[本文引用: 1]
( Zhang Dengbo Tang Youqi Chen Liqun . Nonlinear vibration of an axially moving beam with nonhomogeneous boundary conditions
Chinese Journal of Theoretical and Applied Mechanics , 2019 ,51 (1 ):218 -227 (in Chinese))
[本文引用: 1]
[30]
罗二宝 . 时变张力作用下轴向运动黏弹性梁的力学特性. [硕士论文]
上海:上海应用技术大学 , 2017
[本文引用: 3]
( The dynamics of axially moving viscoelastic beam with time-variant tension. [Master Thesis]
Shanghai: Shanghai Institute of Technology , 2017 (in Chinese))
[本文引用: 3]
[31]
Benettin G Galgani L Strelcyn JM . Kolmogorov entropy and numerical experiments
Physical Review A , 1976 ,14 (6 ):2338 -2345
DOI
URL
[本文引用: 1]
Nonlinear dynamics and bifurcations of an axially moving beam
2
2000
... 现代工程系统中存在着较多的轴向运动结构,如带锯、涂层带钢、发动机传动带、高楼升降机缆绳等. 由于轴速的存在,这些结构在运动过程中会产生不必要的横向振动. 例如,在带锯装置中,刀片的振动会导致工件的加工质量低劣;发动机传送带的横向振动会降低机械传动效率并产生噪声. 轴向运动梁是轴向运动结构中最常见的模型. 长期以来,轴向运动梁的横向非线性振动问题一直是非线性动力学领域的研究热点[1 -4 ] . ...
... 取静态线弹性梁的特征函数为权函数,并按位移在区间[0 ,1 ] 内积分. 则$R_{N}$应满足以下关系 ...
Active vibration control methods of axially moving materials -a review
2004
轴向运动体系横向振动控制的研究进展
1
2017
... 现代工程系统中存在着较多的轴向运动结构,如带锯、涂层带钢、发动机传动带、高楼升降机缆绳等. 由于轴速的存在,这些结构在运动过程中会产生不必要的横向振动. 例如,在带锯装置中,刀片的振动会导致工件的加工质量低劣;发动机传送带的横向振动会降低机械传动效率并产生噪声. 轴向运动梁是轴向运动结构中最常见的模型. 长期以来,轴向运动梁的横向非线性振动问题一直是非线性动力学领域的研究热点[1 -4 ] . ...
轴向运动体系横向振动控制的研究进展
1
2017
... 现代工程系统中存在着较多的轴向运动结构,如带锯、涂层带钢、发动机传动带、高楼升降机缆绳等. 由于轴速的存在,这些结构在运动过程中会产生不必要的横向振动. 例如,在带锯装置中,刀片的振动会导致工件的加工质量低劣;发动机传送带的横向振动会降低机械传动效率并产生噪声. 轴向运动梁是轴向运动结构中最常见的模型. 长期以来,轴向运动梁的横向非线性振动问题一直是非线性动力学领域的研究热点[1 -4 ] . ...
Nonlinear dynamical behavior of axially accelerating beams: Three-dimensional analysis
1
2016
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
Three-dimensional nonlinear planar dynamics of an axially moving Timoshenko beam
1
2013
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
Dynamic stability of a moving string undergoing three-dimensional vibration
1
1995
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
Parametric and internal resonances of an axially moving beam with time-dependent velocity
1
2013
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
Stability and bifurcation analysis of an axially accelerating beam
1
2014
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
轴向运动三参数黏弹性梁的分岔与混沌
1
2018
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
轴向运动三参数黏弹性梁的分岔与混沌
1
2018
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
Nonlinear vibration of axially accelerating hyperelastic beams.
1
2018
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
黏性流体环境下V型悬臂梁结构流固耦合振动特性研究
1
2018
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
黏性流体环境下V型悬臂梁结构流固耦合振动特性研究
1
2018
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
考虑剪切效应的旋转FGM楔形梁刚柔耦合动力学建模与仿真
1
2018
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
考虑剪切效应的旋转FGM楔形梁刚柔耦合动力学建模与仿真
1
2018
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
轴向运动Timoshenko梁固有频率的求解方法研究
1
2009
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
轴向运动Timoshenko梁固有频率的求解方法研究
1
2009
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
Zener internal damping in modelling of axially moving viscoelastic beam with time-dependent tension.
1
2007
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
随机及移动荷载激励下弹性梁分岔与混沌
1
2015
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
随机及移动荷载激励下弹性梁分岔与混沌
1
2015
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
超临界轴向运动Timoshenko梁横向受迫振动
1
2017
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
超临界轴向运动Timoshenko梁横向受迫振动
1
2017
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
Motion characteristics of bilayered extensible Timoshenko microbeams
1
2017
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
中间约束轴向运动梁横向非线性振动
1
2019
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
中间约束轴向运动梁横向非线性振动
1
2019
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
轴向移动悬臂梁高效动力学建模及频率响应分析
1
2017
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
轴向移动悬臂梁高效动力学建模及频率响应分析
1
2017
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
Resonant dynamics of axially functionally graded imperfect tapered Timoshenko beams
1
2019
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
Resonant vibrations of FG viscoelastic imperfect Timoshenko beams
1
2019
... Ghayesh等[5 -6 ] 采用Galerkin法分别研究了轴向加速Euler梁的三维非线性动力特性和轴向运动Timoshenko梁的三维非线性平面动力学. Huang等[7 ] 通过Galerkin法分析了运动弦在三维振动下的动力稳定性. Sahoo等[8 -9 ] 研究了具有时变速度的轴向运动梁的主参数共振和轴向加速梁的稳定性分岔. 李怡等[10 ] 采用三参数模型本构关系,研究了轴向运动黏弹性梁在参数激励下的分岔与混沌特性. Wang等[11 ] 首次引入超弹性分析了轴向加速运动梁的主参量共振. 胡璐等[12 ] 研究了黏性流体环境下V型悬臂梁的流固耦合振动特性. 高晨彤等[13 ] 分析了考虑剪切效应的旋转FGM楔形梁的横向弯曲振动. 杨晓东等[14 ] 讨论并比较了Galerkin法不同截断阶数对轴向运动Timoshenko梁固有频率的影响. Kapitaniak和Marynowski[15 ] 建立三参数本构模型,研究了时变张力作用下轴向运动梁的动力学行为. 李海涛等[16 ] 分析了随机激励与周期激励共同作用下弹性梁的分岔与混沌. 谭霞等[17 ] 采用四阶Galerkin法研究了超临界速度下Timoshenko梁的稳态响应关系. Farokhi 等[18 ] 运用Galerkin法建立了Timoshenko梁的三维耦合简化模型,并数值模拟分析了其非线性运动特性. 赵小颖等[19 ] 采用Galerkin法研究了带有中间弹簧支撑的轴向运动梁的受迫振动. 华洪良等[20 ] 应用Rayleigh-Ritz法分析了轴向移动悬臂梁的频率响应特性. Ghayesh[21 -22 ] 基于Galerkin法分别研究了轴向运动锥形梁的非线性共振和Timoshenko梁的非线性振动. ...
Parametric stability of axially accelerating viscoelastic beams with the recognition of longitudinally varying tensions
1
2012
... Chen和Tang[23 ] 针对速度的周期性脉动,推出了具有径向变化张力的模型,并且很快这种模型被用来研究Euler梁[24 ] 和Timoshenko梁[25 ] 的参数共振. Yan等[26 ] 分别研究了轴向加速运动黏弹性Euler梁的参数共振和内共振,以及Timoshenko梁的稳态周期响应和混沌行为[27 ] . Ding等[28 ] 研究了超临界轴向加速黏弹性梁的分岔和混沌. 张登博等[29 ] 研究了非齐次边界条件下轴向运动梁的次谐波参数共振. ...
Combination and principal parametric resonances of axially accelerating viscoelastic beams: Recognition of longitudinally varying tensions
1
2011
... Chen和Tang[23 ] 针对速度的周期性脉动,推出了具有径向变化张力的模型,并且很快这种模型被用来研究Euler梁[24 ] 和Timoshenko梁[25 ] 的参数共振. Yan等[26 ] 分别研究了轴向加速运动黏弹性Euler梁的参数共振和内共振,以及Timoshenko梁的稳态周期响应和混沌行为[27 ] . Ding等[28 ] 研究了超临界轴向加速黏弹性梁的分岔和混沌. 张登博等[29 ] 研究了非齐次边界条件下轴向运动梁的次谐波参数共振. ...
Stability of axially accelerating viscoelastic Timoshenko beams: Recognition of longitudinally varying tensions
1
2013
... Chen和Tang[23 ] 针对速度的周期性脉动,推出了具有径向变化张力的模型,并且很快这种模型被用来研究Euler梁[24 ] 和Timoshenko梁[25 ] 的参数共振. Yan等[26 ] 分别研究了轴向加速运动黏弹性Euler梁的参数共振和内共振,以及Timoshenko梁的稳态周期响应和混沌行为[27 ] . Ding等[28 ] 研究了超临界轴向加速黏弹性梁的分岔和混沌. 张登博等[29 ] 研究了非齐次边界条件下轴向运动梁的次谐波参数共振. ...
Nonlinear dynamics of axially moving viscoelastic Timoshenko beam under parametric and external excitations
1
2015
... Chen和Tang[23 ] 针对速度的周期性脉动,推出了具有径向变化张力的模型,并且很快这种模型被用来研究Euler梁[24 ] 和Timoshenko梁[25 ] 的参数共振. Yan等[26 ] 分别研究了轴向加速运动黏弹性Euler梁的参数共振和内共振,以及Timoshenko梁的稳态周期响应和混沌行为[27 ] . Ding等[28 ] 研究了超临界轴向加速黏弹性梁的分岔和混沌. 张登博等[29 ] 研究了非齐次边界条件下轴向运动梁的次谐波参数共振. ...
Periodic responses and chaotic behaviors of an axially accelerating viscoelastic Timoshenko beam
1
2014
... Chen和Tang[23 ] 针对速度的周期性脉动,推出了具有径向变化张力的模型,并且很快这种模型被用来研究Euler梁[24 ] 和Timoshenko梁[25 ] 的参数共振. Yan等[26 ] 分别研究了轴向加速运动黏弹性Euler梁的参数共振和内共振,以及Timoshenko梁的稳态周期响应和混沌行为[27 ] . Ding等[28 ] 研究了超临界轴向加速黏弹性梁的分岔和混沌. 张登博等[29 ] 研究了非齐次边界条件下轴向运动梁的次谐波参数共振. ...
Chaotic dynamics of an axially accelerating viscoelastic beam in the supercritical regime
1
2014
... Chen和Tang[23 ] 针对速度的周期性脉动,推出了具有径向变化张力的模型,并且很快这种模型被用来研究Euler梁[24 ] 和Timoshenko梁[25 ] 的参数共振. Yan等[26 ] 分别研究了轴向加速运动黏弹性Euler梁的参数共振和内共振,以及Timoshenko梁的稳态周期响应和混沌行为[27 ] . Ding等[28 ] 研究了超临界轴向加速黏弹性梁的分岔和混沌. 张登博等[29 ] 研究了非齐次边界条件下轴向运动梁的次谐波参数共振. ...
非齐次边界条件下轴向运动梁的非线性振动
1
2019
... Chen和Tang[23 ] 针对速度的周期性脉动,推出了具有径向变化张力的模型,并且很快这种模型被用来研究Euler梁[24 ] 和Timoshenko梁[25 ] 的参数共振. Yan等[26 ] 分别研究了轴向加速运动黏弹性Euler梁的参数共振和内共振,以及Timoshenko梁的稳态周期响应和混沌行为[27 ] . Ding等[28 ] 研究了超临界轴向加速黏弹性梁的分岔和混沌. 张登博等[29 ] 研究了非齐次边界条件下轴向运动梁的次谐波参数共振. ...
非齐次边界条件下轴向运动梁的非线性振动
1
2019
... Chen和Tang[23 ] 针对速度的周期性脉动,推出了具有径向变化张力的模型,并且很快这种模型被用来研究Euler梁[24 ] 和Timoshenko梁[25 ] 的参数共振. Yan等[26 ] 分别研究了轴向加速运动黏弹性Euler梁的参数共振和内共振,以及Timoshenko梁的稳态周期响应和混沌行为[27 ] . Ding等[28 ] 研究了超临界轴向加速黏弹性梁的分岔和混沌. 张登博等[29 ] 研究了非齐次边界条件下轴向运动梁的次谐波参数共振. ...
时变张力作用下轴向运动黏弹性梁的力学特性. [硕士论文]
3
2017
... 本文仅考虑轴向运动梁的横向振动. 黏弹性本构关系取物质时间导数,并考虑黏性阻尼,引入径向变化的轴力,无量纲化的控制方程为[30 ] ...
... 根据周期变化的张力,当横坐标$x$为零时,轴力为初始轴向张力$P_{0}$;横坐标$x$为轴长$L$时,轴力为$P= P_{0}+P_{1}\cos \omega t$,其中$P_{1}$为摄动张力. 初始条件为$t =0$,轴速为 $\varGamma = \varGamma_{0}$,其中, $\varGamma_{0}$为平均轴速. 建立轴向张力和轴向速度之间的关系,可以导出系统的无量纲化的轴速表达式为[30 ] ...
... 本文的数值仿真计算中,给定$L=1.0$ m, $E=30$ GPa, $A=0.04\times 0.03$ m$^{2}$, $\rho =7 680$ kg/m$^{3}$和$P_{0}=6.75\times 10^{4}$ N,解得相应的无量纲参数$k_{ N}=23.0940$,$k_{f}=0.2$. 并计算得无量纲临界速度的值为1.181 0. 考虑$p_{1}=0.5$,$\gamma_{0}=1.15$,$\alpha =0.000 1$,$ c_{ d}=0.001$. 选取张力摄动频率为次谐波共振的频率即$\omega=2\omega_{1}$, $\omega_{1}$为系统线性自由振动的第一阶固有频率, 故$\omega=1.268 3$[30 ] . 无量纲张力摄动幅值的周期$T=2\pi /\omega$,在四阶Runge-Kutta方法的数值计算中,时间步长取为$T/1000$. ...
时变张力作用下轴向运动黏弹性梁的力学特性. [硕士论文]
3
2017
... 本文仅考虑轴向运动梁的横向振动. 黏弹性本构关系取物质时间导数,并考虑黏性阻尼,引入径向变化的轴力,无量纲化的控制方程为[30 ] ...
... 根据周期变化的张力,当横坐标$x$为零时,轴力为初始轴向张力$P_{0}$;横坐标$x$为轴长$L$时,轴力为$P= P_{0}+P_{1}\cos \omega t$,其中$P_{1}$为摄动张力. 初始条件为$t =0$,轴速为 $\varGamma = \varGamma_{0}$,其中, $\varGamma_{0}$为平均轴速. 建立轴向张力和轴向速度之间的关系,可以导出系统的无量纲化的轴速表达式为[30 ] ...
... 本文的数值仿真计算中,给定$L=1.0$ m, $E=30$ GPa, $A=0.04\times 0.03$ m$^{2}$, $\rho =7 680$ kg/m$^{3}$和$P_{0}=6.75\times 10^{4}$ N,解得相应的无量纲参数$k_{ N}=23.0940$,$k_{f}=0.2$. 并计算得无量纲临界速度的值为1.181 0. 考虑$p_{1}=0.5$,$\gamma_{0}=1.15$,$\alpha =0.000 1$,$ c_{ d}=0.001$. 选取张力摄动频率为次谐波共振的频率即$\omega=2\omega_{1}$, $\omega_{1}$为系统线性自由振动的第一阶固有频率, 故$\omega=1.268 3$[30 ] . 无量纲张力摄动幅值的周期$T=2\pi /\omega$,在四阶Runge-Kutta方法的数值计算中,时间步长取为$T/1000$. ...
Kolmogorov entropy and numerical experiments
1
1976
... 在非线性系统中,李雅普诺夫指数是一种识别混沌运动的定量分析方法. 最大李雅普诺夫指数为正,表示系统处于混沌状态;为负则表示为周期运动. 本文利用微分方程的数值解计算梁随着参数$p_{1}$变化的最大李雅普诺夫指数,采用柏内庭(Benettin)法[31 ] 的轨道微 扰原理计算系统的最大李雅普诺夫指数. 取相轨线的初始条件为$q_{n}=0.001$, $\dot{q}_n=0$ ($n=1, 2, 3, 4$). 相邻相轨线的初始条件为$q_{1}=0.001+10^{-7}$, $ q_{2}=q_{3}=q_{4}=0.001$, $\dot{q}_n=0$ ($n=1,2,3,4$). 仿真计算中选取5000$T$至5001$T$的数值解作为循环中的初始条件的值. 为得出准确有效的结果,计算中循环1000个$T$,并取最后500个最大李雅普诺夫指数值的平均数作为最终值. 观察图5 与图1 可知,系统的最大李雅普诺夫指数与分岔图有很好的吻合. 随着张力摄动幅值$p_{1}$的增大,正的最大李雅普诺夫指数的值整体也在增大,表明系统的混乱程度不断增加. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}