基于步态切换的欠驱动双足机器人控制方法
葛一敏, 袁海辉, 甘春标
浙江大学机械工程学院, 杭州 310027
CONTROL METHOD OF AN UNDERACTUATED BIPED ROBOT BASED ON GAIT TRANSITION
Ge Yimin, Yuan Haihui, Gan Chunbiao
中图分类号: TP24
文献标识码: A
通讯作者:
版权声明: 2018 力学学报期刊社 力学学报期刊社 所有
基金资助:
展开
摘要
由于高维、非线性、欠驱动等特点, 3-D双足机器人的稳定性控制依然是一个研究难点. 一些传统的控制方法, 如基于事件的反馈控制方法和PD控制方法, 抗扰动能力较弱, 鲁棒性较差. 通过观察, 人类受到外部扰动影响时, 会通过调整步态重新获得稳定性,相较之下仅依靠一个步态获得的稳定性是有限的. 受此启发, 本文针对上述问题提出一种基于步态切换的欠驱动3-D双足机器人控制方法. 首先, 以能耗最少为优化目标, 通过非线性优化方法预先设计多组不同步长、步速的步态作为参考步态, 以构建一个步态库; 然后, 通过综合考虑步态切换过程中的稳定性与能效, 建立了多目标步态切换函数; 最后, 将该步态切换函数作为优化目标, 并求解该最小化问题获得下一步的参考步态, 从而实现步态切换, 达到使用步态库‒多轨迹方法来提高鲁棒性的目的. 在仿真实验中运用该步态切换控制方法, 欠驱动3-D双足机器人可实现相对高度在[
关键词:
Abstract
The stability control of underactuated 3-D biped robot is still a hard nut to crack, as a result of locomotion characteristics which mix high dimension, strong nonlinearity and underactuation. Some traditional control methods, such as event-based feedback control and PD control, are poor in robustness and weak in resistance to external disturbances. Through observation, it is certain that humans adjust gaits tactically to regain stability when they are affected by external disturbances, by contrast with trying to keep the stability sustained by only one gait which is quite limited. Inspired by this, a control method based on gait transition is proposed for the underactuated 3-D biped robot. First of all, taking the minimum energy consumption as the optimization goal, a multi group of gait and step gait is designed as the reference gait to build a gait library by nonlinear optimization method. Secondly, to obtain an optimal performance in terms of the balance between the stability and input torques, a multi-objective gait transition function is established. Finally, a reference gait that minimizes the gait transition function is obtained by solving a quadratic optimization problem, and it is then used as the walking gait for the next step with the purpose of using gait library (multiple trajectories) method to reach the goal of improving robustness. In the simulation experiment, using the proposed gait transition control method, the underactuated 3-D biped robot can walk through the rough ground with the relative height varying within the range [
Keywords:
引言
机器人作为多学科交叉的代表, 是一个集环境感知、动态决策与规划、运动控制与执行等多功能于一体的综合系统[1-3]. 双足机器人模仿人类移动方式, 适合融入人类生活和工作的环境中, 能够胜任车轮无法克服的崎岖地形, 被认为是最有希望融入人类和自然环境中服务于人的机器人类型[4]. 传统双足机器人的运动规划, 通常以ZMP (零力矩点) 作为稳定判据, 保证足底相对地面不发生反转. 这样的静态步行方式过于保守, 并严重限制了双足机器人的动态运动能力[5-6]. 在双足机器人的动态行走过程中, 欠驱动状态不可避免, 必须着重对其进行规划和控制. 目前, 双足机器人在欠驱动行走方面已取得很大突破[7-8], 但实际抗扰动能力依然较弱, 鲁棒性较差, 仍难以在现实环境中得到充分利用. 综上, 加强抗干扰能力, 提高系统鲁棒性, 是当前欠驱动双足机器人研究需要解决的重点问题.
双足机器人的关节自由度一般高于常见的六自由度工业机器人, 动力学模型非常复杂, 包含了连续变量动态系统、离散事件动态系统以及两者相互作用的动态系统, 表现为混杂系统. 其中连续项模型本身就是一个多变量、强耦合的复杂非线性系统, 微分方程所表达的连续动力学模型非常繁琐. 足部与地面之间关节运动不可控的欠驱动特性, 使得双足机器人需要通过反馈控制算法结合控制对称性[9], 混杂降维[10-11], 横向线性化[12]和混杂零动力学 (HZD)[13-14]等方法稳定步态. 其中, 基于HZD的控制器已经在2-D和3-D机器人[15-17], 2-D和3-D动力假肢[18-20], 外骨骼[18]上进行了数值和实验验证[21-23]. 在此基础上, 为提高机器人的抗扰动能力, Griffin等[24]和Dai等[25]将步态设计及控制 器设计结合到一起, 作为一个优化扰动衰减问题, 允许求解时搜索一系列非线性控制器, 予以近碰撞时刻的轨迹偏差更高的惩罚系数, 使获得的步态能够迅速恢复至预设轨迹; 李超等[26-27] 按照外力作用的位置将扰动分成3种情况, 并基于髋策略分别规划对应的3种开环控制方法, 可以在身体水平稳定状态和直立姿态都受影响的情况下, 同时完成水平方向的平衡控制和直立姿态恢复. 然而从当前的研究结果来看, 欠驱动3-D 双足机器人控制策略灵活性不足, 导致吸引域仍比较窄小, 抗扰动能力还有待提高[13,22].
现实中, 人类在遇到外部扰动时, 会随时通过调整步态以重新获得稳定性. 受此启发, 本文提出一种基于步态切换的控制方法. 该策略首先通过求解一系列不同步速、步长的稳定步态建立步态库, 并仿照控制器代价函数, 通过选取合适的尺度构造多目标步态切换函数, 根据碰撞发生后的系统状态, 从步态库中选择最接近的步态并结合基于事件的反馈控制器将其引至相应步态的理想轨迹. 最后, 通过仿真结果表明该方法在地面不平整情况下能够有效地提高机器人行走鲁棒性.
1 机器人动力学建模
1.1 机器人描述
欠驱动双足机器人的特点是机器人和地面只存在点接触或线接触. 因此考虑建模真实性, 根据人运动平面的划分以及前向为主、侧向为辅的步行运动规律, 参考文献[28] 中提出的无质量线足模型, 建立如图1 所示具有一个前向欠驱动自由度的3D双足机器人.
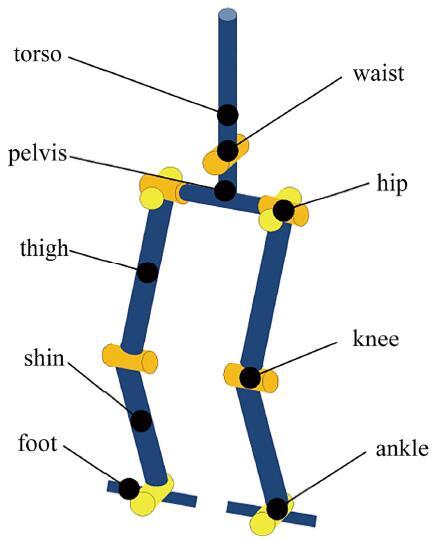
机器人由躯干、臀部、大腿、小腿以及无质量的线型双足组成, 整体关于矢状面严格对称, 脚踝关节位于线足中点, 仅作为冠状面运动的转轴, 限制偏航运动.
1.2 连杆模型
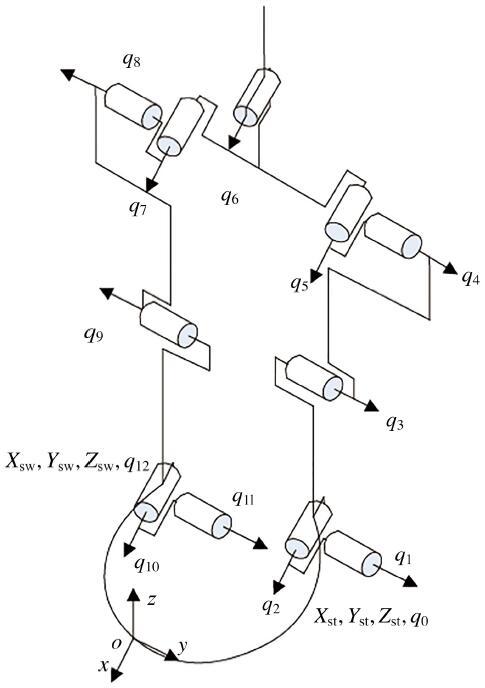
机器人作为多连杆模型关于矢状面严格对称, 因此无论哪条腿用作站姿腿, 可通过重新标记关节角度并在必要时改变其方向标志, 使单足支撑模型可同时表达左右腿支撑期. 建立如图2所示多连杆模型,
1.3 单足支撑动力学模型
令
式中,
定义机器人的状态变量为
式中
1.4 双足支撑期机器人动力学模型
当摆动腿落地时, 既没有反弹也没有滑动, 仅发生瞬时非弹性碰撞, 且碰撞后原支撑腿立即抬起. 根据角动量守恒定律可推得机器人的碰撞模型[25]为
式中,
整理后可得
1.5 混杂动力学模型
由式(3)和式(4), 可建立如下机器人完整混杂动力学模型
其中,
且
2 步态规划与控制器设计
本节简要介绍欠驱动双足机器人的步态规划理论以及反馈控制方法, 为后续步态切换方法提供理论基础.
2.1 虚拟约束设计
虚拟约束[29]是指通过选择一个与时间无关且在单个运动周期内单调变化的循环变量作为机器人系统的时间尺度, 并以该变量作为自变量设计参数样条曲线作为理想关节运动轨迹. 当系统输出为零时, 执行器相当于对各关节之间添加了虚拟的运动学约束.
采用虚拟约束的方法设计系统输出函数时, 自变量只有构型坐标有关, 具体形式如下
式中,
其中, 系数矩阵
式中, 系数
以及
相当于胯部与地面支撑点的夹角,
2.2 步态规划
欠驱动双足机器人的步态规划问题常常被转化为求解虚拟约束系数的非线性约束优化过程 [7,16]. 此时, 可以以驱动关节输入能量最小作为目标, 求解参数向量
可利用MATLAB软件中FMINCON函数对优化目标(12)及相应非线性约束进行设定并求解. 除参考文献[28]中所述的约束条件外, 需增大速度和步长作为不等式约束条件, 以获得不同步长和步速的步态.
2.3 控制器设计
目前, 欠驱动3-D双足机器人的控制器设计主要基于混杂零动力学方法(hybrid zero dynamics framework) [30-31]. 通过对式(7)进行二阶求导, 可得
再利用输入输出线性化方法, 将控制器设计为
式中,
为实现基于碰撞事件的反馈控制, 首先引入
且
进而, 利用文献[27]中的定理2, 选取碰撞后状态集
式中,
根据离散系统的线性二次型最优调节器(DLQR)设计方法, 以
为目标函数, 求解最小化问题获得最优增益矩阵
结合已公开的一些数值仿真结果[21-32]来看, 通过上述基于碰撞事件的反馈控制, 3-D双足机器人稳定步态的吸引域仍然窄小, 抗干扰能力较弱, 尤其当地面高度发生变化时, 控制器容易失效.
3 基于步态切换的控制方法
为了提高基于碰撞事件的反馈控制的鲁棒性, 本文受人类在遇到外部扰动时会通过步态调整重新获得稳定性所启发, 提出一种基于步态切换的控制方法. 该方法其由3个部分组成, 包括建立步态库, 设计步态切换条件, 以及通过求解最小化问题得到下一个步态.
该步态切换方法的整体闭环控制系统如图3所示. 首先, 根据反馈获得摆动腿落地后与地面发生碰撞后的系统状态
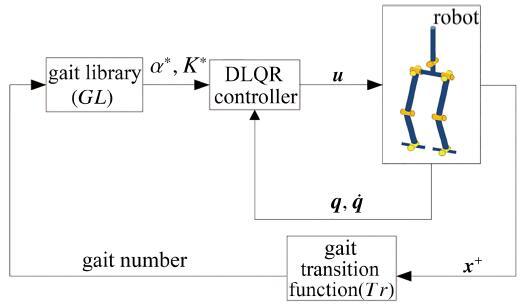
图3 步态切换方法的闭环控制策略.
Fig.3 Closed-loop control strategy of the gait transition method
3.1 建立步态库
定义一个渐进稳定的步态库元素为
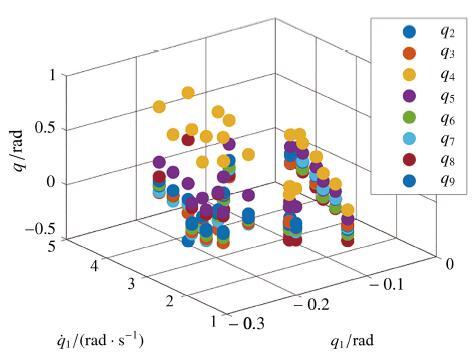
如图4所示, 本文选择最小步速为0.4 m/s (步长为0.2 m)至最大步速为1.2 m/s (步长为0.4 m) 的步态, 由25个通过上节所述的方法离线优化所得的周期步态组成步态库
3.2 步态切换函数
机器人在不平整路面容易发生失稳的重要原因是: 机器人与地面碰撞后的系统状态远离了预定的参考轨迹, 而由于控制器在狭窄的吸引区域内不能捕获该系统状态, 因此导致机器人的状态演化轨迹逐渐偏离预定轨迹. 以往, 国内外学者 [32-34]主要通过扩大吸引域来捕捉碰撞后的系统状态, 从而使机器人的状态轨迹逐渐收敛至预定的参考轨迹. 在此, 本文从控制器设计的另一个角度考虑: 通过及时切换到能够捕捉该系统状态的参考轨迹来实现稳定行走.
为分析切换后的参考步态能否捕捉到机器人发生碰撞后的系统状态, 有必要定义一个度量当前状态与参考步态的函数距离, 利用相似性度量中常用的欧式距离, 定义一个欧氏距离为
其中
式中,
所设计的步态切换函数由三项组成: 首先,
4 仿真验证
为说明该步态切换策略能够有效提高行走鲁棒性, 参考文献[34]中的地面高度设置, 以摆动腿落地时, 地面接触高
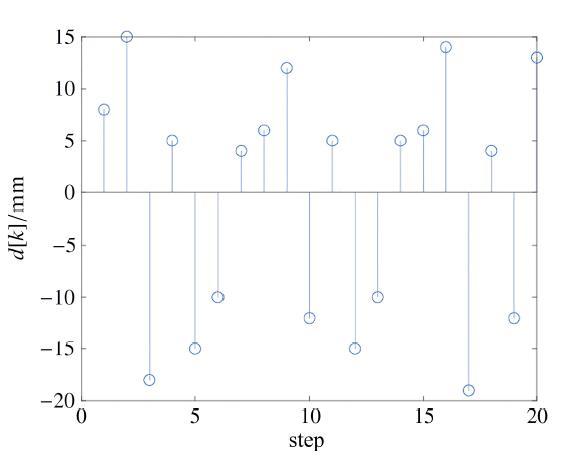
图5 随机生成路面高度 (以20步为一个循环).
Fig.5 Profile of randomly generated ground heights (every 20 steps as a period)
图6所示为机器人关节角度和角度速的相图, 仅采用基于事件的控制方法时, 机器人在三步之后相图呈发散状, 即机器人摔倒. 然而, 采用本文基于步态切换的控制方法, 通过切换不同的步态, 机器人能够有效克服地面高度的随机变化, 通过不平整地面, 如图7所示.
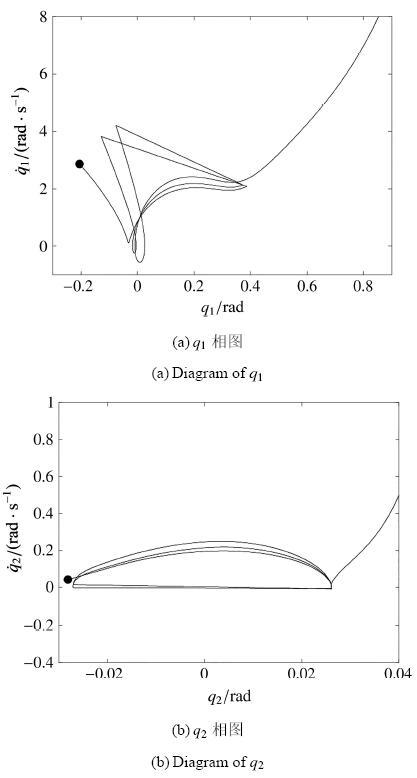
图6 基于事件控制下的关节角度和角速度, 其中黑点为起始位置.
Fig.6 Joint angles and angular velocities under the event-based control, where the red solid circle is the initial position

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
图7 步态切换控制下20步内的关节角度和角速度, 其中黑点为起始位置.
Fig.7 Joint angles and angular velocities within 20 steps under the gait transition control, where the red solid circle is the initial position
由图6可知, 基于事件控制方法的鲁棒性不高, 机器人行走几步后就会摔倒. 然而, 通过预先生成步态库, 机器人可以步态切换的形式克服地面高度变化, 见图7, 从而证明了本文关于步态切换控制方法的有效性和更强的鲁棒性. 对此, 直观的解释是, 选择合适的步态, 使控制器找到能够最快收敛的参考平面, 以适应不平整路面的行走.
5 结论
目前关于双足欠驱动步行运动研究的问题之一是没有定量的方法来测量和比较某个系统的稳定性, 很难通过某个稳定性判据来提高控制器的鲁棒性. 考虑到过去仅依靠一个参考轨迹获得的稳定性是有限的, 因此本文以最原始的稳定性标准‒不摔倒为出发点, 探索使用步态库‒多轨迹方法来实现鲁棒性. 在参考HZD控制器设计方法的基础上, 本文提出了一种步态切换控制方法, 在未显著增加步态规划复杂程度的基础上 (仅仅增加步长及步速作为不等式约束条件), 使得欠驱动双足步行机器人在地面不平整的情况下实现稳定步行, 并通过仿真验证了其可行性. 该方法通过预先规划一些不同步长、步速的周期步态, 组成步态库, 以模仿人类在遇到外部扰动时适时调整步态 (如步长与步速等)的行为为依据, 构造了一个启发式的多目标步态切换函数, 实现不同步态间的有效切换并且保持稳定步行.
The authors have declared that no competing interests exist.
参考文献
| [1] |
空间机器人双臂捕获卫星力学分析及镇定控制 .
Mechanical analysis and calm control of dual-arm space robot for capturing a satellite .
|
| [2] |
机器人无标定视觉伺服控制研究进展 .
Survey on uncalibrated robot visual servoing control .
|
| [3] |
3-PRS并联机器人惯量耦合特性研究 .
research on the inertia coupling property of a 3-PRS parallel robot .
|
| [4] |
双足机器人步态控制研究方法综述 .
Survey on gait control strategies for biped robot .
|
| [5] |
Robust feedback control of ZMP-based gait for the humanoid robot Nao .
|
| [6] |
Modeling, stability and control of biped robots-a general framework .
|
| [7] |
动态双足机器人的控制与优化研究进展 .
A review of optimal and control strategies for dynamic walking bipedal robots .
|
| [8] |
Decentralized control of rhythmic activities in fully-actuated/under-actuated robots .
|
| [9] |
Controlled symmetries and passive walking .
|
| [10] |
|
| [11] |
Reduction-based control of three-dimensional bipedal walking robots .
|
| [12] |
Stable dynamic walking over uneven terrain .
|
| [13] |
Hybrid zero dynamics of planar biped walkers .
|
| [14] |
Hybrid invariant manifolds in systems with impulse effects with application to periodic locomotion in bipedal robots .
|
| [15] |
Rabbit: a testbed for advanced control theory .
|
| [16] |
Embedding active force control within the compliant hybrid zero dynamics to achieve stable, fast running on MABEL .
|
| [17] |
The effects of foot geometric properties on the gait of planar bipeds walking under HZD-based control .
|
| [18] |
Virtual constraint control of a powered prosthetic leg: From simulation to experiments with transfemoral amputees .
|
| [19] |
Multicontact locomotion on transfemoral prostheses via hybrid system models and optimization-based control .
|
| [20] |
Preliminary results on energy efficient 3D prosthetic walking with a powered compliant transfemoral prosthesis//
|
| [21] |
First steps towards translating HZD control of bipedal robots to decentralized control of exoskeletons .
|
| [22] |
Asymptotically stable walking of a five-link underactuated 3-D bipedal robot . |
| [23] |
Performance analysis and feedback control of ATRIAS, a three-dimensional bipedal robot .
|
| [24] |
Walking gait optimization for accommodation of unknown terrain height variations//
|
| [25] |
L2-gain optimization for robust bipedal walking on unknown terrain//
|
| [26] |
欠驱动双足机器人动态步行规划与抗扰动控制. [博士论文] .
Dynamic locomotion and anti-disturbance control of underactuated biped robots. [PhD Thesis] .
|
| [27] |
Push recovery for the standing under-actuated bipedal robot using the hip strategy . |
| [28] |
Optimized 3D stable walking of a bipedal robot with line-shaped massless feet and sagittal underactuation . |
| [29] |
Virtual molonomic constraints for Euler-Lagrange systems .
|
| [30] |
Hybrid zero dynamics of planar biped walkers .
|
| [31] |
Fully analytical solution to discrete behavior of hybrid zero dynamics in limit cycle walking with constraint on impact posture .
|
| [32] |
Analysis results and tools for the control of planar bipedal gaits using hybrid zero dynamics .
|
| [33] |
Canudas-De-Wit C. Event-based PI control of an underactuated biped walker//Decision and Control, 2003, Proceedings. 42nd IEEE Conference on, Maui HI USA,
|
| [34] |
Exponentially stabilizing continuous-time controllers for periodic orbits of hybrid systems: Application to bipedal locomotion with ground height variations . |

/
| 〈 |
|
〉 |