引言
作为陆地重要的地表过程之一,风沙粒子的跃移塑造了形态多样的地貌, 比如沙漠沙丘、海岸沙丘、雅丹地貌、戈壁等[1 ] . 跃移也是粉尘释放的主要动力[2 ] ,而粉尘释放、输送和沉降[3 ] 不但严重地影响到大气环境质量[4 ] ,而且还引起了 全球气候系 统[5 ] 和海洋生态系统的变化[6 ] ,进而产生了复杂的环境效应. 风沙粒子的跃移直接威胁到人们的生产、生活和国民经济与社会的发展. 理解、预报和控制风沙粒子的跃移过程是人类应对此类环境问题的主要对策.
风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解.
高速摄影技术是记录风沙粒子轨迹的主要手 段[21 ,22 ] ; 然而直到目前,还没有一个成熟且适应高浓度风沙图像特征的算法能够细致、完整地从数字高速摄影图像中恢复沙粒的轨迹,这也是目 前对沙粒轨迹形成机制了解甚少的重要原因,因而发展适合高浓度风沙图像(代表着更显著的跃移过程)的沙粒轨迹追踪 算法显得十分必要.
根据图像处理普遍的技术路线[24 ] ,风沙粒子轨迹追踪算法可以分为图像分割和粒子匹配,其中前者是后者的基础,本文仅讨论高 浓度风沙图像的分割算法.
高浓度风沙图像具有4个影响图像分割的特征: (1)高浓度风沙流中沙粒亮度具有明显 的差异,部分暗粒子亮度与背景接近. 沙粒的亮度差异与矿物类型及形貌特征有关(沙粒形貌特征的千差万别导致沙粒对照明光源的反射和散射出现差异,进而造成高速摄影图像上 沙粒的亮度会有明显的差异);沙粒的亮度差异也与沙粒在平动过程中会伴随旋转[25 ] 和侧向运动有关[22 ] (会造成同一颗沙粒明暗 变化);沙粒的亮度差异也与小光圈拍摄的方法有关. 为了减小床面反光效应而清晰地拍摄到床面附近的沙粒运动,采用小光圈拍摄会使图像景深变厚,而这些景深之内沙粒的亮度 低于焦平面沙 粒的亮度. (2)拍摄过程中的环境干扰产生的稳定噪声和随机噪声(见后面讨论)也会影响图像分割的效果. (3)同一个沙粒不同部位上呈现明暗差异的特征,会出现单沙粒被分割成几个沙粒的错误,这里称为单粒子分割现象. (4)沙粒在二维图像上的表观重叠现象(几个沙粒的水平和垂直位置相同而侧向位置不同时,在二维图像上呈现的假重叠现象). 上述特征是设计高浓度风沙图像分割算法的依据以及需要解决的问题.
在诸多图像分割方法中[26 ,27 ,28 ] ,灰度阈值分割是比较简洁和富有效率的传统算法,其原理是在灰度阶的数字序列中选择合适的灰度阈值来分割图像. 灰度阈值的选择方法可分为人工判别阈值和计算机判别的自动阈值两类[26 ,27 ,28 ] .
近年来,梅凡民等[29 ,30 ,31 ] 曾 基于风沙图像灰度直方图采用人工选择灰度阈值的方法进行了风沙图像的分割,结果表明在低浓度风沙流环境下人工选择的单一阈值方法的分割效果良好. 在高浓度风沙高速图像中粒子明暗差异明显,单一阈值分割法会损失很多的目标粒子,因而此法不适合高浓度 风沙图像的精细分析.
和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用.
应该看到,当待处理的 高浓度风沙图像中出现暗目标时,单一灰度阈值分割法则会损失很多目标. 鉴于此,多相流力学领域的研究者提 出了诸多的基于单粒子检测的动态阈值算法,其中以Ohmi 和 Li 的算法(简称O-Li法, 下同)为代表[37 ] . 最近该算法被引入到风沙图像处理[38 ] 以及多相流PTV算法 中[39 ,40 ] . 研究表明,和单阈值分割法相比较,动态阈值算法有效地提高了风沙粒子的提取率[38 ] . 需要注意的是,O-Li算法需要根据研究者的经验来设置粒子的最小灰度、最大灰度和粒子与背景的对比度等参数[37 ] ,这可能会 给算法的分割效果带来不确定性.
鉴于传统的最大类间方差灰度阈值算法属于单阈值算法,本文提出了基于动态灰度阈值的改进的最大类间方差算法,其在2个方面有进步. (1)针对高浓度风沙图像的噪声特点设计了背景模板去噪的算法,该算法减小了图像中稳定噪声对目标提取的干扰. 背景模板去噪曾经被引入风沙图像处理中[38 ] ,结合本文处理图像的特征,作者进一步对其效果予以讨论. (2) 增加了灰度方差阈值目标检测的算法. 这既尽可能地避免对微分单元的背景信息再分割而所产生噪声的干扰,也能提高目标提取的查全率和查准率,较好地解决了沙粒明暗差 异和随机噪声等对图像分割的影响. 灰度方差阈值目标检测是作者针对风沙图像动态阈值分割存在的问题而设计的,此算法未在以前的文献中提及和讨论,这是本文工作的主要亮点.
改进的动态灰度阈值算法对进一步理解风沙两相流的耦合机制提供了有力的技术支撑,也会对多相流力学、岩土力学和生态学等领域图像 分割算法的改进提供参考.
1 改进的高浓度风沙图像的灰度阈值分割算法的流程及效果
1.1 算法流程
改进的最大类间方差灰度阈值图像分割算法的流程包括扣减背景模板去噪、绿光通道灰度化处理、图像微分、灰度方差阈值 目 标检测、最大类间方差灰度阈值分割等(见图1 ),其中前4步算法属于图像分割的预处理.
图像去噪是图像分割前处理的第一步,本文根据图像噪声的特征来设计去噪算法. 对本组风沙图像而言,噪声可分为两类,一类为稳定的噪声,是指这组图像的某些位置会普遍出现的噪声, 包括 条纹状、条带状噪声(可能是拍摄时风洞玻璃窗对镜头上齿轮的反光所致,见图2 (a))和未知原因造成的某些位置的沙粒背后的黑斑 状噪声(见图3 (a)). 另一类是随机噪声(见图4 ). 对这两类噪声,本文分别选用扣减背景模板去噪和灰度方差阈值目标检测算法来实现.
图1 改进的风沙图像灰度阈值分割算法流程图
Fig. 1 The flow chart of an improved algorithm of maximum between-class variance of grey-thresholding for segmenting aeolian sand particles’ images
图2 背景模板去除条纹状噪声的效果((a) 含有条纹状、条带状噪声的原图,(b) 背景模板去噪后的图像)
Fig.2 (a) An aeolian sand particles’ image with noises like stripes; (b) the denoising image by subtracting a background image
图3 背景模板去除条纹状噪声的效果((a)含有黑斑噪声的原图,(b)背景模板去噪后的图像)
Fig.3 (a) An aeolian sand particles’ image with noises like maculae; (b) the denoising image by subtracting a background image
扣减背景模板去噪法是指从每幅风沙图像中扣减背景模板的信息来去除风沙图像中稳定噪声的方法. 背景模板是从连续图像中没有 沙粒的图像中选取. 图2 (b)和图3 (b)表明扣减背景模板法剔除了原始图像中的齿轮样的横条纹、横条带和沙粒背后的黑斑,风沙图像的整体背景呈均匀黑色, 去噪效果良好.
以往的风沙图像处理中用到模板去噪的算法[38 ] ,主要用来消除背景噪声和床面反光. 本文的结果表明该算法有效地去除了 图2 中的条纹噪声和图3 中沙粒后面的黑斑噪声,其对稳定噪声的效果更明显.
风沙图像也存在随机噪声(见图4 ). 一般地,随机噪声的去除是根据 灰度直方图的特征来选择相应的滤波器来处理[34 ] ,但这 种方法不适合高浓度风沙图像去噪,因为滤波之后一些亮度和背景相近的沙粒会被去除而造成图像目标信息的损失. 这里 采用基于灰度方差阈值的目标检测法来实现对随机噪声的去除(见后面的论述).
图4 风沙图像背景的灰度直方图
Fig. 4 Gray level histogram of backgrounds of the aeolian image
RGB彩色图像的灰度化一般采用均值法来处理[24 ] ,但考虑到本文图像拍摄的照明光源为绿色激光,因而采用分量法中的绿光通道来 对图像进行灰度化处理. 图5 (b)表明绿光通道灰度化处理后,沙粒灰度分布均匀、饱满、清晰,其灰度化效果明显好于均值法(见图5 (a)). 这也意味着以纯色激光照明拍摄的高速摄影图像,其灰度化选用分量法处理更合适.
图5 灰度化效果的对比((a) 均值法,(b)绿色通道灰度化)
Fig. 5 (a) an image by graying of averaged grey value; (b) the image by graying of green channel
图像微分是指利用微分思想把一幅风沙图像分成微小的灰度单元并以此作为图像分割的基本单位,灰度单元大小会影响到图像分割的 效果. 一方面,微小单元划分得越小,目标信息的提取可能越详细;另一方面,微小单元划分得越小,则会耗用更多的计算资源. 因而选择合适的微小灰度单元的尺度很重要. 本文选取5 × 5 像素的灰度单元作为图像分割的基本尺度,这个尺度根据风沙图像中沙粒的大小(最大沙粒是10 × 10 像素)和上述因素来共同确定.
需要说明的是,图像微分的具体尺度应该因图像本身的具体特征而定.
基于灰度方差阈值的目标检测是指通过选择合适的灰度方差阈值来检测风沙图像灰度单元中是否存在目标的方法,其数学原理是用风沙图像内的微分单元的灰度方差阈值来识别目标,可表示为
$\varphi (i)=\left\{ \begin{array}{ll} 1 , & \sigma^2_i < T \\ 0 , & \sigma^2_i <T \end{array}\!\! \right.\ \ \ (1\leq i \leq n) (1)$
其中 σ i 2 i T
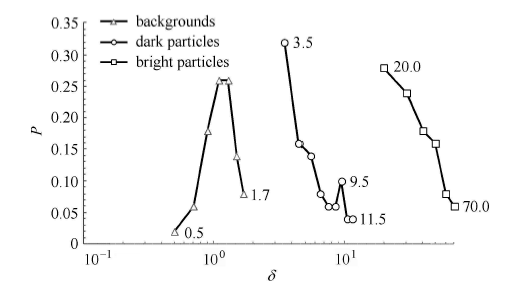
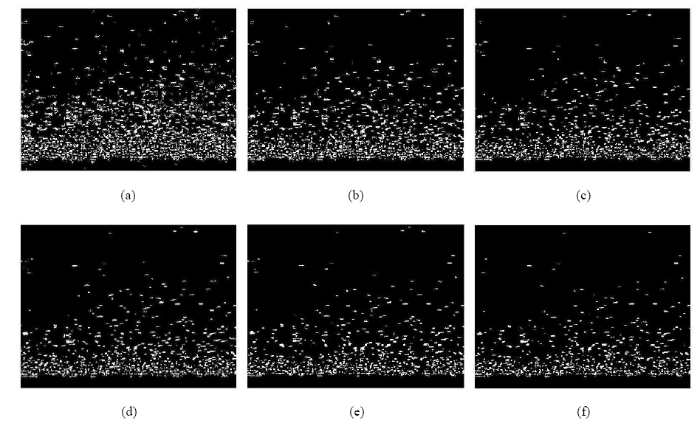
合适的阈值 T 图6 ). 图6 显示背景类单元的灰度方差在0.5~1.7之间,其概率分布的峰值对应的灰度方差为1.1 ~ 1.3之间;暗粒子类的灰度方差在3.5 ~ 11.5之间,其中灰度方差在3.5 ~ 4.5之间的概率最大(32%),这意味着微分单元灰度方差在1.7 ~ 3.5之间的可能是暗粒子也可能是背景;亮粒子类的灰度方差在20.0 ~ 70.0之间,其中灰度方差在20.0 ~ 30.0的概率最大(28%),这表明在微分单元灰度方差数值上亮粒子易于和暗粒子及背景区分. (2)据图6 来确定初步的用于目标检测的灰度方差的范围,区分暗沙粒和背景的灰度方差的阈值应该介于2.0~4.5之间. (3)在初步筛选的灰度方差阈值范围内,通过逐步试验 确定最佳阈值. 图7 是灰度方差阈值在2.0~4.5之间变化时所分割的风沙图像. 当灰度方差阈值为2.0和2.5时,所提取沙粒数量很丰富,但沙粒周围会出现明显的噪声 点(见图7 (a),图7 (b));当灰度方差阈值为4.0和4.5时,图像上的噪声点已不明显但丢失了一些沙粒的信息(见图7 (e),图7 (f)); 当该阈值为3.0和3.5时,是沙粒提取数量和噪声信息的折中(见图7 (c),图7 (d)),这两个阈值既能尽可能完整提取沙粒的信息也可 能避免噪声信息的干扰,是比较合适的阈值. 相关的研究可根据研究目的和精度的具体要求来选择合适的灰度方差 阈值. 本文研究选择3.5作为目标识别的阈值时,图像分割的查全率和查准率均优于其他灰度方差阈值的结果(见表1 ),这是因为灰度标准方差 的阈值低于3.5时,有背景随机噪声的干扰而灰度标准方差阈值高于3.5会过滤掉部分目标信息.
图6 包含亮粒子、暗粒子和背景等微分单元的灰度方差(δ P
Fig. 6 Probability of gray-level variances of such tiny units as bright particles, dark particles and backgrounds
图7 不同灰度方差阈值目标检测下风沙图像分割效果(从(a)到(f),灰度标准方差阈值分别为2.0,2.5,3.0,3.5,4.0,4.5)
Fig. 7 The segmented aeolian sand particles’ images under different standard variances’ threshold of gray values (The standard variances’ threshold ranges from 2.0 to 4.5, corresponding to (a) to (f))
图8 改进的和传统的灰度阈值分割算法效果的比较((a)传统的算法,(b) 传统算法+图像微分,(c)改进的算法)
Fig. 8 Comparison between output of the improve algorithm and that of the traditional algorithm ((a) the output of traditional algorithm, (b) output of the traditional algorithm+differential gray grids, (c) output of the improved algorithm)
灰度方差阈值的目标检测法尽可能地把整幅风沙图像中每一个微分灰度单元中的沙粒从背景中识别出来,同时又尽可能地避免了分割误差产生的噪声;同时也去除了原始图像中的随机噪声,具有 一石二鸟 的效果. 图8 (b)表明在图像微分的基础上,直接利用传统的最大类间方差灰度阈值分割法时,会出现大量的噪声和 目标模糊不清的特征,这表明在传统的阈值分割算法的基础上增加灰度方差阈值目标检测算法是十分必要的. 在灰度方差阈值目标检测的基础上,再利用最大类间方差灰度阈值法进行图像分割时,其提取的沙粒浓度明显高于传统算法的 结果(见图8 (a)),且有效地去除了图像的噪声(见图8 (c)),这是本文工作的主要亮点.
1.2 算法的总体效果
为了评价改进算法的图像分割效果,这里引用有效沙粒数量、查全率和查准率来说明. 实际沙粒数量 N r N i N i e ~ 3 个像素的误差,故采用此作为算法和人工识别为同一沙粒的依据),否则认为算法识别错误,这样 就可以确定一幅图像中算法有效识别的沙粒数目. 查全率和查准率分别是指算法识别沙粒数量、有效识别沙粒数量与图像中实际沙粒数量的比值. 这两个指标表征了图像分割算法的效率和精度.
表1 显示当目标检测的灰度方差阈值设置为3.5时,改进的算法所提取的有效沙粒数量、查全率和查准率分别为461, 71%和86%, 均显著高于传统算法对应的85, 13%和82%,也高于其他方差阈值目标检测下的结果,这表明改进的图像算法的目标提取的效率和精度得到显著提高,图像分割 效果良好(见 图8 (c)).
前人用O-Li法研究了风沙图像分割效果[33 ] , 结果表明在真实粒子数500个的情况下,该算法的查准率在95% ~ 96 %,高于本算法的结果. 但应该看到,前人研究中利用的是人工生成的灰度图像,且灰度图像的分辨率为512 × 512 ,而本文为了更完整地记录沙波纹形 成过程中粒--床碰撞信息,采用的图像分辨率为512 × 384 ,这可能是造成本文算法查准率低于O-Li法的可能原因.
改进算法显著地提高了图像分割的查全率和查准率,关键的原因有2个:(1)模板去噪法有效地去除了图像中的稳定噪声;(2)灰度方 差阈值目标检测算法既提高了目标识别和分割的精细化程度,也有效地去除了图像随机噪声和降低了分割错误带来的噪声.
本文的改进算法的查全率还有一定的提升空间. 导致查全率不高有3个原因:(1)图像中部分暗粒子的亮度与背景接近,在模板去噪和 灰度阈值方差目标检测时被剔除掉;(2)单粒子分割现象;(3)表观重叠现象. 考虑到(1)是图像固有特征,今后的研究工作着重通过解 决(2)和(3)的问题来进一步提高查全率和查准率.
2 讨 论
在灰度阈值分割算法中[26 -32 ,37 ] ,目前还没有一个完美的普适算法来指导各个领域包括风沙科学的图像分割工作. 本文改进的动态灰度阈值分割法主要解决了风沙图像沙粒亮度差异、稳定噪声和随机噪声等对图像分割影响的问题,但还没有解决单粒子分割和沙粒表观重叠引起的错误分割问题,今后的灰度阈值分割算法应从解决这两个问题入手发展新的图像分割算法,以进一步提高图像分割的效果.
随着PC机性能的改善、服务器运行速度的提高和使用成本的降低,未来的高浓度风沙图像的分割算法可开发基于像素点的自适应阈值和多元阈值算法[26 ,27 ,28 ] ,因为这些算法能更精细地寻找更合适的灰度阈值来分割图像,从而进一步提高目标提取的查全率和查准率.
对于风沙图像单粒子分割和表观重叠现象,除了考虑改进灰度阈值分割算法外,今后可以发展适合风沙图像的边缘检测算法来替代阈值分割方法算法[26 ,27 ,28 ] ,这也是改进风沙图像分割的一个路径.
彩色RGB数字风沙图像所记录的信息比黑白图像更为丰富,目前的图像分割算法一般是把彩色图像灰度化后再进行分割,这必然会损失大量有价值的目标信息. 今后的研究可以直接从彩色图像数值特征入手,发展基于彩色图像处理的高浓度风沙图像分割算法[24 ] ,该类算法可能比灰度阈值算法能更有效地提取沙粒信息,这是今后风沙图像分割努力的方向.
风沙图像分割效果的改善除了从算法改进考虑外,也可从风沙图像三维拍摄、三维图像阈值分割入手来全面地改善风沙图像的质量和分割效果方式,这将是提高风沙图像分割质量最有效的技术途径.
3 结 论
风沙跃移是干旱区地貌发育主要动力,其伴随的粉尘释放、输送和沉降过程对全球大气环境质量、气候系统和海洋生态系统产生了重要的影响. 为了从单个沙粒输送尺度来理解风沙输运的机制,本文针对高浓度风沙图像明暗不均和噪声的特点,提出了一个改进的动态阈值分割算法,该算法包括背景模板去噪、绿光通道灰度化处理、图像微分、灰度方差阈值目标检测和最大类间方差灰度阈值分割等. 新算法主要进展在于背景模板去噪方案和灰度方差阈值目标检测等. 背景模板去噪显著地去除了图像中齿轮样条带、横条带和沙粒背后的黑斑等稳定噪声,也使得整幅图像的背景趋近均一,为图像目标识别提供了很好的基础. 作为新算法的亮点和最重要的程序,灰度方差阈值目标检测既能够从微分灰度单元中有效地区分和识别暗粒子,也能够避免背景被识别为沙粒的错误. 高浓度风沙图像分割实验表明,改进算法的沙粒有效识别数、查全率和查准率分别为461, 71%和86%,显著地高于传统算法对应的85, 13%和82%,这表明新算法对高浓度风沙图像的分割效果良好,但还可以在诸多方面进一步的完善.
The authors have declared that no competing interests exist.
参考文献
文献选项
[1]
Bagnold RA The Physics of Blown Sand and Desert Dunes
. London:Methuen , 1941 : 265
[本文引用: 1]
[2]
Alfaro SC Gomes L Modeling mineral aerosol production by wind erosion: Emission intensities and aerosol size distribution in source areas
. J Geophys Res , 2001 , 106 (D16 ): 18075 -18084
[本文引用: 1]
[3]
Zhang J Shao Y Huang N Measurements of dust deposition velocity in a wind-tunnel experiment
. Atmos Chem Phys , 2014 , 14 : 8869 -8882
[本文引用: 1]
[4]
Yang Y Russell LM Lou SJ et al . Dust-wind interactions can intensify aerosol pollution over eastern China
. Nat Commun , 2017 , 8 : 15333
[本文引用: 1]
[5]
Dumka UC Kaskaoutis DG Srivastava MK et al . Scattering and absorbing properties of near-surface aerosols over Gangetic-Himalayan region: The role of boundary layer dynamics and long-range transport
. Atmo Chem Phys , 2015 , 15 : 1555 -1572
[本文引用: 1]
[6]
Mahowald NM Baker AR Bergametti G et al . Atmospheric global dust cycle and iron input to ocean
. Global Biogeochemical Cycles 2005 , 19: GB4025
[本文引用: 1]
[7]
Anderson RS Haff PK Simulation of eolian saltation
. Science , 1988 , 241 : 820 -823
[本文引用: 2]
[8]
Werner BT Haff PK Impact process in Aeolian saltation: two dimensional simulations
. Sedimentology , 1988 , 35 : 189 -196
[本文引用: 1]
[9]
Rice MA Willetts BB McEwan IK. An experimental study of multiple grain-size ejecta produced by collisions of saltating grains with a flat bed
. Sedimentology , 1995 , 42 : 695 -706
[本文引用: 1]
[10]
Zheng XJ Xue L Zhou YH Exploration of probability distribution of velocities of saltating sand particles based on the stochastic particle-bed collisions
. Physics Letters A , 2005 , 341 : 107 -118
[本文引用: 1]
[11]
Wang DW Wang Y Yang B et al . Statistical analysis of sand grain/bed collision process recorded by high-speed digital camera
. Sedimentology , 2008 , 55 : 461 -470
[本文引用: 1]
[12]
Yin X Huang N Wang ZS A numerical investigation into sand grain/slope bed collision
. Powder Technology , 2017 , 314 : 28 -38
[本文引用: 1]
[13]
Owen PR Saltation of uniform grains in air
. J Fluid Mech , 1964 , 20 : 225 -242
[本文引用: 1]
[14]
McEwan IK Willetts BB Adaptation of the near-surface wind to the development of sand transport
. J Fluid Mech , 1993 , 252 : 99 -115
[本文引用: 1]
[15]
Li ZS Ni JR Mendoza C An analytic expression for wind-velocity profile within the saltation layer
. Geomorphology , 2004 , 60 : 359 -369
[本文引用: 1]
[16]
Huang N Wang ZS The formation of snow streamers in the turbulent atmosphere boundary layer
. Aeolian Research , 2016 , 23 : 1 -10
[本文引用: 1]
[17]
Wang ZT Zhang CL Wang HT Coherent structures over flat sandy surfaces in aeolian environment
. Catena , 2017 , 159 : 144 -148
[本文引用: 1]
[18]
Anderson RS Eolian sediment transport as a stochastic process: The effects of a fluctuating
. Journal of Geology , 1987 , 95 : 497 -512
[本文引用: 1]
[19]
郑晓静 ,王萍 . 风沙流中沙粒随机运动的数值模拟研究
. 中国沙漠 ,2006 , 26 (2 ):184 -187
(Zhen Xiaojing Wang Ping Numerical simulation on stochastic movement of sands in wind-blown sand
.Journal of Desert Research , 2006 , 26 (2 ): 184 -187 (in Chinese))
[20]
Kok JF Renno NO A comprehensive numerical model of steady state saltation (COMSALT)
. Journal of Geophysics Research , 2009 , 114 , D17204
[本文引用: 1]
[21]
Nalpanis P Hunt JCR Barrett C Saltating particles over flat beds
. J Fluid Mech , 1993 , 251 : 661 -685
[本文引用: 2]
[22]
Zhang W Kang J Lee S Tracking of saltating sand trajectories over a flat surface embedded in an atmospheric boundary layer
. Geomorphology , 2007 , 86 : 320 -331
[本文引用: 3]
[23]
Ho DT Valance A Dupont P et al . Aeolian sand transport: Length and height distributions of saltation trajectories
. Aeolian Research , 2014 , 12 : 65 -74
[本文引用: 1]
[24]
Oge Marques. 实用MATLAB图像和视频处理 . 章毓晋译. 北京 :清华大学出版社 , 2013 :260 -300
[本文引用: 3]
(Oge Marques. Practical Image and Video Processing Using MatLab. Zhang Yujin Translation. Beijing :Tsinghua Press, 2013:360- 363 ,277 -299 (in Chinese))
[本文引用: 3]
[25]
Zou XY Cheng H Zhang CL et al . Effects of the Magnus and Saffman forces on the saltation trajectories of sand grain
. Geomorphology , 2007 , 90 : 11 -22
[本文引用: 1]
[26]
Pal NR Pal SK A review on image segmentation techniques
. Pattern Recognition , 1993 , 26 (9 ): 1277 -1294
[本文引用: 6]
[27]
Zhang YJ Advances in Image & Video Segmentation. Hershey:
Idea Group Inc. , 2006 : 1 -15
[本文引用: 5]
[28]
Dilpreet K Yadwinder K Various image segmentation techniques: a review
. International Journal of Computer Science and Mobile Computing , 2014 , 5 (3 ): 809 -814
[本文引用: 5]
[29]
梅凡民 , 蒋缠文 . 风沙颗粒运动的数字高速摄影图像的分割算法
. 力学学报 , 2012 , 44 (1 ):83 -85
[本文引用: 1]
(Mei Fanmin Jiang Chanwen An arithmetic method of segmenting moving aeolian sand particles’ images from background information of digital high-speed photography images
.Chinese Journal of Theoretical and Applied Mechanics , 2012 , 44 (1 ):83 -85 (in Chinese))
[本文引用: 1]
[30]
Jiang C Dong Z Wang Y An improved particle tracking velocimetry (PTV) technique to evaluate the velocity field of saltating particles
. Journal of Arid Land , 2017 , 9 (5 ): 727 -742
[本文引用: 1]
[31]
蒋缠文 ,王晓艳 , 董治宝 . 高速摄影技术在风沙颗粒测速中的应用研究
.干旱区地理 , 2017 , 40 (4 ):746 -749
[本文引用: 1]
(Jiang Chanwen Wang Xiaoyan Dong Zhibao High-speed photography in measuring the velocity of sand particles in an air/particle two-phase flow
.Aria Land Geography , 2017 , 40 (4 ): 746 -749 (in Chinese))
[本文引用: 1]
[32]
Nobuyuki O A threshold selection method from gray-level histograms
. IEEE Trans. on System, Man, and Cybernetics , 1979 , 9 (1 ): 62 -66
[本文引用: 2]
[33]
刘文洪 , 万甜 , 程文娟 等 . 基于图像二值化处理的气泡羽流不稳定结构分析
. 水利学报 ,2009 , 40 (11 ): 1369 -1373
[本文引用: 2]
(Liu Wenghong Wan Tian Cheng Wenjuan et al . Analysis on steady structure of bubble plume in the basis of image binarization
.Journal of Hydraulic Engineering , 2009 , 40 (11 ): 1369 -1373 (in Chinese))
[本文引用: 2]
[34]
薛婷 , 孟欣东 , 张涛 . 气液两相流中气泡形态及运动特征参数提取
. 光电子激光 ,2010 , 21 (8 ):1218 -1220
[本文引用: 2]
(Xue Ting Meng Xindong Zhang Tao Extraction of bubble shape and motion feature parameters in the gas-liquid two-phase flow
.Journal of Optoelectronics · Laser ,2010 , 21 (8 ):1218 -1220 (in Chinese))
[本文引用: 2]
[35]
尹延春 ,赵同彬 ,谭云亮 等 . 基于Otsu 图像处理的岩石细观模型重构及数值试验
. 岩土力学 ,2015 , 36 (9 ):2532 -2541
[本文引用: 1]
(Yin Yanchun Zhao Tongbin Tan Yunliang et al . Reconstruction and numerical test of the mesoscopic model of rock based on Otsu digital image processing
.Rock and Soil Mechanics , 2015 , 36 (9 ):2532 -2541 (in Chinese))
[本文引用: 1]
[36]
张爱华 , 王帆 , 陈海燕 . 基于改进CV模型的高原鼠兔图像分割
. 华中科技大学学报(自然科学版) , 2017 , 45 (8 ):32 -37
[本文引用: 1]
(Zhang Aihua Wang Fan Chen Haiyan Ochotona curzoniae image segmentation based on the improved CV model
.J Huazhong Univ of Sci & Tech ( Natural Science Edition )2017 , 45 (8 ):32 -37 (in Chinese))
[本文引用: 1]
[37]
Ohmi K Li HY Particle-tracking velocimetry with new algorithms
. Measurement Science and Technology , 2000 , 11 : 603 -616
[本文引用: 3]
[38]
刘江 ,王元 ,杨斌 . 高频测量输沙浓度对湍流脉动的频率响应
. 西安交通大学学报 , 2010 , 44 (11 ): 113 -118
[本文引用: 4]
(Liu Jiang Wang Yuan Yang Bin High-frequency measurements of particle response to turbulence
.Journal of Xi’An Jiaotong University , 2010 , 44 (11 ): 113 -118 (in Chinese))
[本文引用: 4]
[39]
贾攀 ,王元 ,张洋 . 基于Delaunay网格技术的松弛迭代粒子追踪算法
. 空气动力学报 ,2012 ,30 (6 ):792 -797
[本文引用: 1]
(Jia Pan Wang Yuan Zhang Yang Relaxation based on PTV with Delaunay triangulation
. Acta Aerodynamic Sinica , 2012 , 30 (6 ):792 -797 (in Chinese))
[本文引用: 1]
[40]
Jia P Wang Y Zhang Y Improvement in the independence of relaxation method-based particle tracking velocimetry
. Measurement Science and Technology , 2013 , 24 : 1 -13
[本文引用: 1]
The Physics of Blown Sand and Desert Dunes
1
1941
... 作为陆地重要的地表过程之一,风沙粒子的跃移塑造了形态多样的地貌, 比如沙漠沙丘、海岸沙丘、雅丹地貌、戈壁等[1 ] . 跃移也是粉尘释放的主要动力[2 ] ,而粉尘释放、输送和沉降[3 ] 不但严重地影响到大气环境质量[4 ] ,而且还引起了 全球气候系 统[5 ] 和海洋生态系统的变化[6 ] ,进而产生了复杂的环境效应. 风沙粒子的跃移直接威胁到人们的生产、生活和国民经济与社会的发展. 理解、预报和控制风沙粒子的跃移过程是人类应对此类环境问题的主要对策. ...
Modeling mineral aerosol production by wind erosion: Emission intensities and aerosol size distribution in source areas
1
2001
... 作为陆地重要的地表过程之一,风沙粒子的跃移塑造了形态多样的地貌, 比如沙漠沙丘、海岸沙丘、雅丹地貌、戈壁等[1 ] . 跃移也是粉尘释放的主要动力[2 ] ,而粉尘释放、输送和沉降[3 ] 不但严重地影响到大气环境质量[4 ] ,而且还引起了 全球气候系 统[5 ] 和海洋生态系统的变化[6 ] ,进而产生了复杂的环境效应. 风沙粒子的跃移直接威胁到人们的生产、生活和国民经济与社会的发展. 理解、预报和控制风沙粒子的跃移过程是人类应对此类环境问题的主要对策. ...
Measurements of dust deposition velocity in a wind-tunnel experiment
1
2014
... 作为陆地重要的地表过程之一,风沙粒子的跃移塑造了形态多样的地貌, 比如沙漠沙丘、海岸沙丘、雅丹地貌、戈壁等[1 ] . 跃移也是粉尘释放的主要动力[2 ] ,而粉尘释放、输送和沉降[3 ] 不但严重地影响到大气环境质量[4 ] ,而且还引起了 全球气候系 统[5 ] 和海洋生态系统的变化[6 ] ,进而产生了复杂的环境效应. 风沙粒子的跃移直接威胁到人们的生产、生活和国民经济与社会的发展. 理解、预报和控制风沙粒子的跃移过程是人类应对此类环境问题的主要对策. ...
Dust-wind interactions can intensify aerosol pollution over eastern China
1
2017
... 作为陆地重要的地表过程之一,风沙粒子的跃移塑造了形态多样的地貌, 比如沙漠沙丘、海岸沙丘、雅丹地貌、戈壁等[1 ] . 跃移也是粉尘释放的主要动力[2 ] ,而粉尘释放、输送和沉降[3 ] 不但严重地影响到大气环境质量[4 ] ,而且还引起了 全球气候系 统[5 ] 和海洋生态系统的变化[6 ] ,进而产生了复杂的环境效应. 风沙粒子的跃移直接威胁到人们的生产、生活和国民经济与社会的发展. 理解、预报和控制风沙粒子的跃移过程是人类应对此类环境问题的主要对策. ...
Scattering and absorbing properties of near-surface aerosols over Gangetic-Himalayan region: The role of boundary layer dynamics and long-range transport
1
2015
... 作为陆地重要的地表过程之一,风沙粒子的跃移塑造了形态多样的地貌, 比如沙漠沙丘、海岸沙丘、雅丹地貌、戈壁等[1 ] . 跃移也是粉尘释放的主要动力[2 ] ,而粉尘释放、输送和沉降[3 ] 不但严重地影响到大气环境质量[4 ] ,而且还引起了 全球气候系 统[5 ] 和海洋生态系统的变化[6 ] ,进而产生了复杂的环境效应. 风沙粒子的跃移直接威胁到人们的生产、生活和国民经济与社会的发展. 理解、预报和控制风沙粒子的跃移过程是人类应对此类环境问题的主要对策. ...
19: GB4025
1
2005
... 作为陆地重要的地表过程之一,风沙粒子的跃移塑造了形态多样的地貌, 比如沙漠沙丘、海岸沙丘、雅丹地貌、戈壁等[1 ] . 跃移也是粉尘释放的主要动力[2 ] ,而粉尘释放、输送和沉降[3 ] 不但严重地影响到大气环境质量[4 ] ,而且还引起了 全球气候系 统[5 ] 和海洋生态系统的变化[6 ] ,进而产生了复杂的环境效应. 风沙粒子的跃移直接威胁到人们的生产、生活和国民经济与社会的发展. 理解、预报和控制风沙粒子的跃移过程是人类应对此类环境问题的主要对策. ...
Simulation of eolian saltation
2
1988
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
... [7 ,18 -20 ],但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
Impact process in Aeolian saltation: two dimensional simulations
1
1988
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
McEwan IK. An experimental study of multiple grain-size ejecta produced by collisions of saltating grains with a flat bed
1
1995
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
Exploration of probability distribution of velocities of saltating sand particles based on the stochastic particle-bed collisions
1
2005
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
Statistical analysis of sand grain/bed collision process recorded by high-speed digital camera
1
2008
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
A numerical investigation into sand grain/slope bed collision
1
2017
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
Saltation of uniform grains in air
1
1964
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
Adaptation of the near-surface wind to the development of sand transport
1
1993
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
An analytic expression for wind-velocity profile within the saltation layer
1
2004
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
The formation of snow streamers in the turbulent atmosphere boundary layer
1
2016
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
Coherent structures over flat sandy surfaces in aeolian environment
1
2017
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
Eolian sediment transport as a stochastic process: The effects of a fluctuating
1
1987
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
A comprehensive numerical model of steady state saltation (COMSALT)
1
2009
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
Saltating particles over flat beds
2
1993
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
... 高速摄影技术是记录风沙粒子轨迹的主要手 段[21 ,22 ] ; 然而直到目前,还没有一个成熟且适应高浓度风沙图像特征的算法能够细致、完整地从数字高速摄影图像中恢复沙粒的轨迹,这也是目 前对沙粒轨迹形成机制了解甚少的重要原因,因而发展适合高浓度风沙图像(代表着更显著的跃移过程)的沙粒轨迹追踪 算法显得十分必要. ...
Tracking of saltating sand trajectories over a flat surface embedded in an atmospheric boundary layer
3
2007
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
... 高速摄影技术是记录风沙粒子轨迹的主要手 段[21 ,22 ] ; 然而直到目前,还没有一个成熟且适应高浓度风沙图像特征的算法能够细致、完整地从数字高速摄影图像中恢复沙粒的轨迹,这也是目 前对沙粒轨迹形成机制了解甚少的重要原因,因而发展适合高浓度风沙图像(代表着更显著的跃移过程)的沙粒轨迹追踪 算法显得十分必要. ...
... 高浓度风沙图像具有4个影响图像分割的特征: (1)高浓度风沙流中沙粒亮度具有明显 的差异,部分暗粒子亮度与背景接近. 沙粒的亮度差异与矿物类型及形貌特征有关(沙粒形貌特征的千差万别导致沙粒对照明光源的反射和散射出现差异,进而造成高速摄影图像上 沙粒的亮度会有明显的差异);沙粒的亮度差异也与沙粒在平动过程中会伴随旋转[25 ] 和侧向运动有关[22 ] (会造成同一颗沙粒明暗 变化);沙粒的亮度差异也与小光圈拍摄的方法有关. 为了减小床面反光效应而清晰地拍摄到床面附近的沙粒运动,采用小光圈拍摄会使图像景深变厚,而这些景深之内沙粒的亮度 低于焦平面沙 粒的亮度. (2)拍摄过程中的环境干扰产生的稳定噪声和随机噪声(见后面讨论)也会影响图像分割的效果. (3)同一个沙粒不同部位上呈现明暗差异的特征,会出现单沙粒被分割成几个沙粒的错误,这里称为单粒子分割现象. (4)沙粒在二维图像上的表观重叠现象(几个沙粒的水平和垂直位置相同而侧向位置不同时,在二维图像上呈现的假重叠现象). 上述特征是设计高浓度风沙图像分割算法的依据以及需要解决的问题. ...
Aeolian sand transport: Length and height distributions of saltation trajectories
1
2014
... 风沙两相流输送过程可以概括为沙粒的空气动力学起动、沙粒轨迹的形成、粒--床碰撞过程、风况的调整等[7 ] ,其中, 粒--床的碰 撞[8 ,9 ,10 ,11 ,12 ] 和风况的调整[13 ,14 ,15 ,16 ,17 ] 分别得到了广泛的研究,而沙粒轨迹的实验研究则十分有限. 沙粒完整轨迹数据主要来自于数值模拟如文献[7 ,18 -20 ] ,但由于对湍性风的表征不同,所模拟的沙粒轨迹也有差异. 目前实验观测的数据特别是完整的沙粒轨迹则很有限[21 ,22 ,23 ] ,且沙粒轨迹数据主要是在较低浓度沙粒环境下获得的, 缺乏同 步的瞬时边界层湍流的数据,其结果很难完整地反映沙粒轨迹形成的机制,也限制了人们在单个粒子尺度上从风沙两相流耦合角度对风沙输 送机制的进一步理解. ...
3
2013
... 根据图像处理普遍的技术路线[24 ] ,风沙粒子轨迹追踪算法可以分为图像分割和粒子匹配,其中前者是后者的基础,本文仅讨论高 浓度风沙图像的分割算法. ...
... RGB彩色图像的灰度化一般采用均值法来处理[24 ] ,但考虑到本文图像拍摄的照明光源为绿色激光,因而采用分量法中的绿光通道来 对图像进行灰度化处理. 图5 (b)表明绿光通道灰度化处理后,沙粒灰度分布均匀、饱满、清晰,其灰度化效果明显好于均值法(见图5 (a)). 这也意味着以纯色激光照明拍摄的高速摄影图像,其灰度化选用分量法处理更合适. ...
... 彩色RGB数字风沙图像所记录的信息比黑白图像更为丰富,目前的图像分割算法一般是把彩色图像灰度化后再进行分割,这必然会损失大量有价值的目标信息. 今后的研究可以直接从彩色图像数值特征入手,发展基于彩色图像处理的高浓度风沙图像分割算法[24 ] ,该类算法可能比灰度阈值算法能更有效地提取沙粒信息,这是今后风沙图像分割努力的方向. ...
3
2013
... 根据图像处理普遍的技术路线[24 ] ,风沙粒子轨迹追踪算法可以分为图像分割和粒子匹配,其中前者是后者的基础,本文仅讨论高 浓度风沙图像的分割算法. ...
... RGB彩色图像的灰度化一般采用均值法来处理[24 ] ,但考虑到本文图像拍摄的照明光源为绿色激光,因而采用分量法中的绿光通道来 对图像进行灰度化处理. 图5 (b)表明绿光通道灰度化处理后,沙粒灰度分布均匀、饱满、清晰,其灰度化效果明显好于均值法(见图5 (a)). 这也意味着以纯色激光照明拍摄的高速摄影图像,其灰度化选用分量法处理更合适. ...
... 彩色RGB数字风沙图像所记录的信息比黑白图像更为丰富,目前的图像分割算法一般是把彩色图像灰度化后再进行分割,这必然会损失大量有价值的目标信息. 今后的研究可以直接从彩色图像数值特征入手,发展基于彩色图像处理的高浓度风沙图像分割算法[24 ] ,该类算法可能比灰度阈值算法能更有效地提取沙粒信息,这是今后风沙图像分割努力的方向. ...
Effects of the Magnus and Saffman forces on the saltation trajectories of sand grain
1
2007
... 高浓度风沙图像具有4个影响图像分割的特征: (1)高浓度风沙流中沙粒亮度具有明显 的差异,部分暗粒子亮度与背景接近. 沙粒的亮度差异与矿物类型及形貌特征有关(沙粒形貌特征的千差万别导致沙粒对照明光源的反射和散射出现差异,进而造成高速摄影图像上 沙粒的亮度会有明显的差异);沙粒的亮度差异也与沙粒在平动过程中会伴随旋转[25 ] 和侧向运动有关[22 ] (会造成同一颗沙粒明暗 变化);沙粒的亮度差异也与小光圈拍摄的方法有关. 为了减小床面反光效应而清晰地拍摄到床面附近的沙粒运动,采用小光圈拍摄会使图像景深变厚,而这些景深之内沙粒的亮度 低于焦平面沙 粒的亮度. (2)拍摄过程中的环境干扰产生的稳定噪声和随机噪声(见后面讨论)也会影响图像分割的效果. (3)同一个沙粒不同部位上呈现明暗差异的特征,会出现单沙粒被分割成几个沙粒的错误,这里称为单粒子分割现象. (4)沙粒在二维图像上的表观重叠现象(几个沙粒的水平和垂直位置相同而侧向位置不同时,在二维图像上呈现的假重叠现象). 上述特征是设计高浓度风沙图像分割算法的依据以及需要解决的问题. ...
A review on image segmentation techniques
6
1993
... 在诸多图像分割方法中[26 ,27 ,28 ] ,灰度阈值分割是比较简洁和富有效率的传统算法,其原理是在灰度阶的数字序列中选择合适的灰度阈值来分割图像. 灰度阈值的选择方法可分为人工判别阈值和计算机判别的自动阈值两类[26 ,27 ,28 ] . ...
... [26 ,27 ,28 ]. ...
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
... 在灰度阈值分割算法中[26 -32 ,37 ] ,目前还没有一个完美的普适算法来指导各个领域包括风沙科学的图像分割工作. 本文改进的动态灰度阈值分割法主要解决了风沙图像沙粒亮度差异、稳定噪声和随机噪声等对图像分割影响的问题,但还没有解决单粒子分割和沙粒表观重叠引起的错误分割问题,今后的灰度阈值分割算法应从解决这两个问题入手发展新的图像分割算法,以进一步提高图像分割的效果. ...
... 随着PC机性能的改善、服务器运行速度的提高和使用成本的降低,未来的高浓度风沙图像的分割算法可开发基于像素点的自适应阈值和多元阈值算法[26 ,27 ,28 ] ,因为这些算法能更精细地寻找更合适的灰度阈值来分割图像,从而进一步提高目标提取的查全率和查准率. ...
... 对于风沙图像单粒子分割和表观重叠现象,除了考虑改进灰度阈值分割算法外,今后可以发展适合风沙图像的边缘检测算法来替代阈值分割方法算法[26 ,27 ,28 ] ,这也是改进风沙图像分割的一个路径. ...
Advances in Image & Video Segmentation. Hershey:
5
2006
... 在诸多图像分割方法中[26 ,27 ,28 ] ,灰度阈值分割是比较简洁和富有效率的传统算法,其原理是在灰度阶的数字序列中选择合适的灰度阈值来分割图像. 灰度阈值的选择方法可分为人工判别阈值和计算机判别的自动阈值两类[26 ,27 ,28 ] . ...
... ,27 ,28 ]. ...
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
... 随着PC机性能的改善、服务器运行速度的提高和使用成本的降低,未来的高浓度风沙图像的分割算法可开发基于像素点的自适应阈值和多元阈值算法[26 ,27 ,28 ] ,因为这些算法能更精细地寻找更合适的灰度阈值来分割图像,从而进一步提高目标提取的查全率和查准率. ...
... 对于风沙图像单粒子分割和表观重叠现象,除了考虑改进灰度阈值分割算法外,今后可以发展适合风沙图像的边缘检测算法来替代阈值分割方法算法[26 ,27 ,28 ] ,这也是改进风沙图像分割的一个路径. ...
Various image segmentation techniques: a review
5
2014
... 在诸多图像分割方法中[26 ,27 ,28 ] ,灰度阈值分割是比较简洁和富有效率的传统算法,其原理是在灰度阶的数字序列中选择合适的灰度阈值来分割图像. 灰度阈值的选择方法可分为人工判别阈值和计算机判别的自动阈值两类[26 ,27 ,28 ] . ...
... ,28 ]. ...
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
... 随着PC机性能的改善、服务器运行速度的提高和使用成本的降低,未来的高浓度风沙图像的分割算法可开发基于像素点的自适应阈值和多元阈值算法[26 ,27 ,28 ] ,因为这些算法能更精细地寻找更合适的灰度阈值来分割图像,从而进一步提高目标提取的查全率和查准率. ...
... 对于风沙图像单粒子分割和表观重叠现象,除了考虑改进灰度阈值分割算法外,今后可以发展适合风沙图像的边缘检测算法来替代阈值分割方法算法[26 ,27 ,28 ] ,这也是改进风沙图像分割的一个路径. ...
风沙颗粒运动的数字高速摄影图像的分割算法
1
2012
... 近年来,梅凡民等[29 ,30 ,31 ] 曾 基于风沙图像灰度直方图采用人工选择灰度阈值的方法进行了风沙图像的分割,结果表明在低浓度风沙流环境下人工选择的单一阈值方法的分割效果良好. 在高浓度风沙高速图像中粒子明暗差异明显,单一阈值分割法会损失很多的目标粒子,因而此法不适合高浓度 风沙图像的精细分析. ...
风沙颗粒运动的数字高速摄影图像的分割算法
1
2012
... 近年来,梅凡民等[29 ,30 ,31 ] 曾 基于风沙图像灰度直方图采用人工选择灰度阈值的方法进行了风沙图像的分割,结果表明在低浓度风沙流环境下人工选择的单一阈值方法的分割效果良好. 在高浓度风沙高速图像中粒子明暗差异明显,单一阈值分割法会损失很多的目标粒子,因而此法不适合高浓度 风沙图像的精细分析. ...
An improved particle tracking velocimetry (PTV) technique to evaluate the velocity field of saltating particles
1
2017
... 近年来,梅凡民等[29 ,30 ,31 ] 曾 基于风沙图像灰度直方图采用人工选择灰度阈值的方法进行了风沙图像的分割,结果表明在低浓度风沙流环境下人工选择的单一阈值方法的分割效果良好. 在高浓度风沙高速图像中粒子明暗差异明显,单一阈值分割法会损失很多的目标粒子,因而此法不适合高浓度 风沙图像的精细分析. ...
高速摄影技术在风沙颗粒测速中的应用研究
1
2017
... 近年来,梅凡民等[29 ,30 ,31 ] 曾 基于风沙图像灰度直方图采用人工选择灰度阈值的方法进行了风沙图像的分割,结果表明在低浓度风沙流环境下人工选择的单一阈值方法的分割效果良好. 在高浓度风沙高速图像中粒子明暗差异明显,单一阈值分割法会损失很多的目标粒子,因而此法不适合高浓度 风沙图像的精细分析. ...
高速摄影技术在风沙颗粒测速中的应用研究
1
2017
... 近年来,梅凡民等[29 ,30 ,31 ] 曾 基于风沙图像灰度直方图采用人工选择灰度阈值的方法进行了风沙图像的分割,结果表明在低浓度风沙流环境下人工选择的单一阈值方法的分割效果良好. 在高浓度风沙高速图像中粒子明暗差异明显,单一阈值分割法会损失很多的目标粒子,因而此法不适合高浓度 风沙图像的精细分析. ...
A threshold selection method from gray-level histograms
2
1979
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
... 在灰度阈值分割算法中[26 -32 ,37 ] ,目前还没有一个完美的普适算法来指导各个领域包括风沙科学的图像分割工作. 本文改进的动态灰度阈值分割法主要解决了风沙图像沙粒亮度差异、稳定噪声和随机噪声等对图像分割影响的问题,但还没有解决单粒子分割和沙粒表观重叠引起的错误分割问题,今后的灰度阈值分割算法应从解决这两个问题入手发展新的图像分割算法,以进一步提高图像分割的效果. ...
基于图像二值化处理的气泡羽流不稳定结构分析
2
2009
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
... 前人用O-Li法研究了风沙图像分割效果[33 ] , 结果表明在真实粒子数500个的情况下,该算法的查准率在95% ~ 96 %,高于本算法的结果. 但应该看到,前人研究中利用的是人工生成的灰度图像,且灰度图像的分辨率为512 × 512 ,而本文为了更完整地记录沙波纹形 成过程中粒--床碰撞信息,采用的图像分辨率为512 × 384 ,这可能是造成本文算法查准率低于O-Li法的可能原因. ...
基于图像二值化处理的气泡羽流不稳定结构分析
2
2009
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
... 前人用O-Li法研究了风沙图像分割效果[33 ] , 结果表明在真实粒子数500个的情况下,该算法的查准率在95% ~ 96 %,高于本算法的结果. 但应该看到,前人研究中利用的是人工生成的灰度图像,且灰度图像的分辨率为512 × 512 ,而本文为了更完整地记录沙波纹形 成过程中粒--床碰撞信息,采用的图像分辨率为512 × 384 ,这可能是造成本文算法查准率低于O-Li法的可能原因. ...
气液两相流中气泡形态及运动特征参数提取
2
2010
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
... 风沙图像也存在随机噪声(见图4 ). 一般地,随机噪声的去除是根据 灰度直方图的特征来选择相应的滤波器来处理[34 ] ,但这 种方法不适合高浓度风沙图像去噪,因为滤波之后一些亮度和背景相近的沙粒会被去除而造成图像目标信息的损失. 这里 采用基于灰度方差阈值的目标检测法来实现对随机噪声的去除(见后面的论述). ...
气液两相流中气泡形态及运动特征参数提取
2
2010
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
... 风沙图像也存在随机噪声(见图4 ). 一般地,随机噪声的去除是根据 灰度直方图的特征来选择相应的滤波器来处理[34 ] ,但这 种方法不适合高浓度风沙图像去噪,因为滤波之后一些亮度和背景相近的沙粒会被去除而造成图像目标信息的损失. 这里 采用基于灰度方差阈值的目标检测法来实现对随机噪声的去除(见后面的论述). ...
基于Otsu 图像处理的岩石细观模型重构及数值试验
1
2015
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
基于Otsu 图像处理的岩石细观模型重构及数值试验
1
2015
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
基于改进CV模型的高原鼠兔图像分割
1
2017
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
基于改进CV模型的高原鼠兔图像分割
1
2017
... 和人工判别阈值法相比较,自动阈值法的优势在于其客观性和高效率. 在全局自动阈值分割算法中[26 ,27 ,28 ] ,最大类间方差灰度阈值分割是基于目标灰度方差大于背景灰度的假定[32 ] ,通过迭代计算以整幅图像目标和背景间灰度方差达到最大值时对应的灰度值作为最佳分割阈值的算法. 该算法的优点是不依赖于先验知识,算法简洁,自提出后在水力 学[33 ,34 ] 、岩土力学[35 ] 和生态学[36 ] 等领域的图像处理工作中得到了广泛地应用. ...
Particle-tracking velocimetry with new algorithms
3
2000
... 应该看到,当待处理的 高浓度风沙图像中出现暗目标时,单一灰度阈值分割法则会损失很多目标. 鉴于此,多相流力学领域的研究者提 出了诸多的基于单粒子检测的动态阈值算法,其中以Ohmi 和 Li 的算法(简称O-Li法, 下同)为代表[37 ] . 最近该算法被引入到风沙图像处理[38 ] 以及多相流PTV算法 中[39 ,40 ] . 研究表明,和单阈值分割法相比较,动态阈值算法有效地提高了风沙粒子的提取率[38 ] . 需要注意的是,O-Li算法需要根据研究者的经验来设置粒子的最小灰度、最大灰度和粒子与背景的对比度等参数[37 ] ,这可能会 给算法的分割效果带来不确定性. ...
... [37 ],这可能会 给算法的分割效果带来不确定性. ...
... 在灰度阈值分割算法中[26 -32 ,37 ] ,目前还没有一个完美的普适算法来指导各个领域包括风沙科学的图像分割工作. 本文改进的动态灰度阈值分割法主要解决了风沙图像沙粒亮度差异、稳定噪声和随机噪声等对图像分割影响的问题,但还没有解决单粒子分割和沙粒表观重叠引起的错误分割问题,今后的灰度阈值分割算法应从解决这两个问题入手发展新的图像分割算法,以进一步提高图像分割的效果. ...
高频测量输沙浓度对湍流脉动的频率响应
4
2010
... 应该看到,当待处理的 高浓度风沙图像中出现暗目标时,单一灰度阈值分割法则会损失很多目标. 鉴于此,多相流力学领域的研究者提 出了诸多的基于单粒子检测的动态阈值算法,其中以Ohmi 和 Li 的算法(简称O-Li法, 下同)为代表[37 ] . 最近该算法被引入到风沙图像处理[38 ] 以及多相流PTV算法 中[39 ,40 ] . 研究表明,和单阈值分割法相比较,动态阈值算法有效地提高了风沙粒子的提取率[38 ] . 需要注意的是,O-Li算法需要根据研究者的经验来设置粒子的最小灰度、最大灰度和粒子与背景的对比度等参数[37 ] ,这可能会 给算法的分割效果带来不确定性. ...
... [38 ]. 需要注意的是,O-Li算法需要根据研究者的经验来设置粒子的最小灰度、最大灰度和粒子与背景的对比度等参数[37 ] ,这可能会 给算法的分割效果带来不确定性. ...
... 鉴于传统的最大类间方差灰度阈值算法属于单阈值算法,本文提出了基于动态灰度阈值的改进的最大类间方差算法,其在2个方面有进步. (1)针对高浓度风沙图像的噪声特点设计了背景模板去噪的算法,该算法减小了图像中稳定噪声对目标提取的干扰. 背景模板去噪曾经被引入风沙图像处理中[38 ] ,结合本文处理图像的特征,作者进一步对其效果予以讨论. (2) 增加了灰度方差阈值目标检测的算法. 这既尽可能地避免对微分单元的背景信息再分割而所产生噪声的干扰,也能提高目标提取的查全率和查准率,较好地解决了沙粒明暗差 异和随机噪声等对图像分割的影响. 灰度方差阈值目标检测是作者针对风沙图像动态阈值分割存在的问题而设计的,此算法未在以前的文献中提及和讨论,这是本文工作的主要亮点. ...
... 以往的风沙图像处理中用到模板去噪的算法[38 ] ,主要用来消除背景噪声和床面反光. 本文的结果表明该算法有效地去除了 图2 中的条纹噪声和图3 中沙粒后面的黑斑噪声,其对稳定噪声的效果更明显. ...
高频测量输沙浓度对湍流脉动的频率响应
4
2010
... 应该看到,当待处理的 高浓度风沙图像中出现暗目标时,单一灰度阈值分割法则会损失很多目标. 鉴于此,多相流力学领域的研究者提 出了诸多的基于单粒子检测的动态阈值算法,其中以Ohmi 和 Li 的算法(简称O-Li法, 下同)为代表[37 ] . 最近该算法被引入到风沙图像处理[38 ] 以及多相流PTV算法 中[39 ,40 ] . 研究表明,和单阈值分割法相比较,动态阈值算法有效地提高了风沙粒子的提取率[38 ] . 需要注意的是,O-Li算法需要根据研究者的经验来设置粒子的最小灰度、最大灰度和粒子与背景的对比度等参数[37 ] ,这可能会 给算法的分割效果带来不确定性. ...
... [38 ]. 需要注意的是,O-Li算法需要根据研究者的经验来设置粒子的最小灰度、最大灰度和粒子与背景的对比度等参数[37 ] ,这可能会 给算法的分割效果带来不确定性. ...
... 鉴于传统的最大类间方差灰度阈值算法属于单阈值算法,本文提出了基于动态灰度阈值的改进的最大类间方差算法,其在2个方面有进步. (1)针对高浓度风沙图像的噪声特点设计了背景模板去噪的算法,该算法减小了图像中稳定噪声对目标提取的干扰. 背景模板去噪曾经被引入风沙图像处理中[38 ] ,结合本文处理图像的特征,作者进一步对其效果予以讨论. (2) 增加了灰度方差阈值目标检测的算法. 这既尽可能地避免对微分单元的背景信息再分割而所产生噪声的干扰,也能提高目标提取的查全率和查准率,较好地解决了沙粒明暗差 异和随机噪声等对图像分割的影响. 灰度方差阈值目标检测是作者针对风沙图像动态阈值分割存在的问题而设计的,此算法未在以前的文献中提及和讨论,这是本文工作的主要亮点. ...
... 以往的风沙图像处理中用到模板去噪的算法[38 ] ,主要用来消除背景噪声和床面反光. 本文的结果表明该算法有效地去除了 图2 中的条纹噪声和图3 中沙粒后面的黑斑噪声,其对稳定噪声的效果更明显. ...
基于Delaunay网格技术的松弛迭代粒子追踪算法
1
2012
... 应该看到,当待处理的 高浓度风沙图像中出现暗目标时,单一灰度阈值分割法则会损失很多目标. 鉴于此,多相流力学领域的研究者提 出了诸多的基于单粒子检测的动态阈值算法,其中以Ohmi 和 Li 的算法(简称O-Li法, 下同)为代表[37 ] . 最近该算法被引入到风沙图像处理[38 ] 以及多相流PTV算法 中[39 ,40 ] . 研究表明,和单阈值分割法相比较,动态阈值算法有效地提高了风沙粒子的提取率[38 ] . 需要注意的是,O-Li算法需要根据研究者的经验来设置粒子的最小灰度、最大灰度和粒子与背景的对比度等参数[37 ] ,这可能会 给算法的分割效果带来不确定性. ...
基于Delaunay网格技术的松弛迭代粒子追踪算法
1
2012
... 应该看到,当待处理的 高浓度风沙图像中出现暗目标时,单一灰度阈值分割法则会损失很多目标. 鉴于此,多相流力学领域的研究者提 出了诸多的基于单粒子检测的动态阈值算法,其中以Ohmi 和 Li 的算法(简称O-Li法, 下同)为代表[37 ] . 最近该算法被引入到风沙图像处理[38 ] 以及多相流PTV算法 中[39 ,40 ] . 研究表明,和单阈值分割法相比较,动态阈值算法有效地提高了风沙粒子的提取率[38 ] . 需要注意的是,O-Li算法需要根据研究者的经验来设置粒子的最小灰度、最大灰度和粒子与背景的对比度等参数[37 ] ,这可能会 给算法的分割效果带来不确定性. ...
Improvement in the independence of relaxation method-based particle tracking velocimetry
1
2013
... 应该看到,当待处理的 高浓度风沙图像中出现暗目标时,单一灰度阈值分割法则会损失很多目标. 鉴于此,多相流力学领域的研究者提 出了诸多的基于单粒子检测的动态阈值算法,其中以Ohmi 和 Li 的算法(简称O-Li法, 下同)为代表[37 ] . 最近该算法被引入到风沙图像处理[38 ] 以及多相流PTV算法 中[39 ,40 ] . 研究表明,和单阈值分割法相比较,动态阈值算法有效地提高了风沙粒子的提取率[38 ] . 需要注意的是,O-Li算法需要根据研究者的经验来设置粒子的最小灰度、最大灰度和粒子与背景的对比度等参数[37 ] ,这可能会 给算法的分割效果带来不确定性. ...
 , 雒遂
, 雒遂





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
