引言
V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能.
近年来, V型悬臂梁结构设计、性能表征及其力学行为得到广泛关注.Sader等[14 ] 提出了V型悬臂梁刚度系数的校准方法, 并在商用V型梁器件制备中得到成功应用[15 ] .Lee等[16 ,17 ,18 ] 基于经典梁理论和修正后的偶应力理论, 分别分析了矩形梁和V型悬臂梁的灵敏度, 结果表明, 在接触刚度较低时, V型悬臂梁比矩形梁的振动模态灵敏度高.Korayem等[19 ,20 ,21 ] 研究了V型梁结构几何变化对其刚度系数的影响, 并分析了非接触、轻敲两种模式下的V型悬臂梁结构的动力学特性.
虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式.
本文基于Euler-Bernoulli梁理论, 针对V型结构变截面、变刚度等复杂几何特征, 建立了V型梁结构在黏性流体环境下的流固耦合振动模型.引入V型梁结构的截面孔宽比参数对矩形梁水动力函数进行修正, 得到截面孔宽比和频率参数影响下V型悬臂梁结构的水动力函数.开展V型悬臂梁结构在水环境下的流固耦合振动实验研究, 将实验测得的频率响应结果与模型求解结果进行对比, 对水动力函数表达式及流固耦合振动模型进行了验证.基于V型悬臂梁结构流固耦合振动模型, 分析了不同流体黏度、V型梁角度及尺寸变化对流固耦合动力学特性的影响.
1 动力学模型与分析
1.1 V型梁流固耦合动力学模型
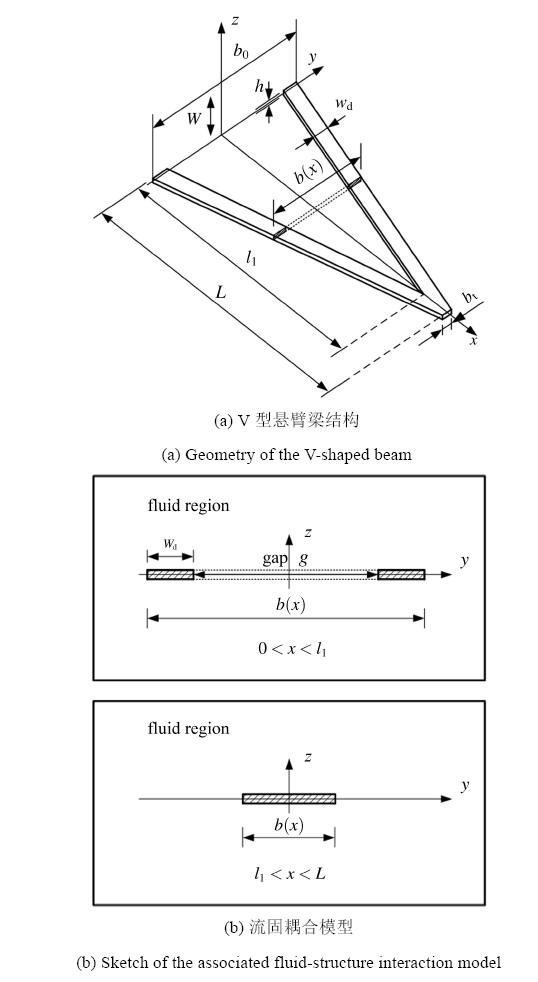
图1 所示为V型梁结构及其流固耦合动力学模型, 梁长度、宽度及厚度分别为$L, h, b(x)=b_0-ax$, 式中$a=(b_0-b{\rm{_t}})/L$, b 0 b t g 图1 (b)可得$K(x)$, $m_{s}(x)$的表达式为
$ \begin{equation} K(x)=\begin{cases} Ew_{d}h^3/6, & 0<x<l_1 \\ Eb(x)h^3/12, & l_1<x<L \end{cases} \end{equation} $ (1a)
$ \begin{equation} m_{s}(x)=\begin{cases} 2{\rho}_{s}w_{d}h, & 0<x<l_1 \\ {\rho}_{s}b(x)h, & l_1<x<L \end{cases} \end{equation}$ (1b)
式中, $E$, $w_{d}$, $\rho_{s}$分别为梁结构的弹性模量、腿宽和密度.
图1 V型梁结构及其流固耦合模型
Fig.1 Geometry of the V-shaped beam and sketch of the associated fluid-structure interaction model
基于Euler-Bernoulli梁理论, V型梁的动力学方程可表示为
$ \begin{equation}\begin{split} &\frac{\partial ^2}{\partial x^2}\left[K(x)\frac{\partial ^2w(x, t)}{\partial x^2}\right]+m_{s}(x)\frac{\partial ^2}{\partial t^2}[w(x, t)+ \\ &\quad\quad W(t)]=H(x, t)+s(x, t) \end{split} \end{equation}$ (2)
式中, 梁结构末端所受基础激励为 W ( t ) = W 0 ( ω ) sin ( ω t ) ω W 0 ( ω ) H ( x , t ) s ( x , t ) x ∈ [ 0 , l 1 ) ∪ ( l 1 , L ] . 为简化方程(2), 采用滞后阻尼模型描述 s ( x , t ) K ( x ) K ( x ) ( 1 + i η ) η H ( x , t )
$\begin{equation} \hat{H}(x, {\omega})=\frac{\pi}{4}\rho_{f}\omega^2b(x)^2\textit{Θ}(\beta(x, \omega),\gamma(x))\hat{A}(x, \omega) \end{equation}$ (3)
式中, ${\rho}_{f}$为流体密度, ${\hat{A}}(x, {\omega})=W_0({\omega})+\hat{w}(x, {\omega})$为梁结构的变形相量, \textit{Θ}为水动力函数. 无量纲频率参数$\beta(x, {\omega})$和截面孔宽比参数$\gamma(x)$的表达式分别为
$\beta(x, \omega)=\frac{\rho_{f}\omega b(x)^2}{2{\rm\pi}\mu}$ (4a)
$\begin{equation} \gamma(x)= \begin{cases} {\dfrac{b(x)-2w_{d}}{b(x)}}, & 0<x<l_1 \\ 0, & l_1<x<L \end{cases} \end{equation}$ (4b)
式中, μ
由此, 可得方程(2)在频域内的表达式为
$\frac{1+\rm i\eta}{m_{\rm s}(x)}\frac{\partial ^2}{\partial x^2}\left[k(x)\frac{\partial ^2\hat{w}(x,\omega)}{\partial x^2}\right]-\omega ^2[W_0(\omega)+ \hat{w}(x, \omega)] \\ =\omega^2M(x){\Theta}(\beta(x, \omega), \gamma(x))[W_0(\omega)+\hat{w}(x, \omega)]$ (5)
式中, M ( x ) = π ρ f b ( x ) 2 / ( 4 m s ( x ) ) .
水动力函数$\Theta $描述了耦合系统中V 型梁所受载荷, 对于求解V型梁流固耦合动力学模型, 分析其动力学特性具有重要意义.Aureli等[35 ] 提出的水动力函数$\gamma $仅适用于矩形梁, 用其分析V型梁所受载荷, 会导致附加质量力及流体阻尼力出现严重的偏差, 因此, 为得到适用于V型梁的水动力函数$\Theta $, 亟需对矩形梁水动力函数$\gamma $进行修正.
1.2 水动力函数修正
在黏性流体环境下, Aureli等引入黏滞层无量纲厚度的仿射相关变量 β - 0.5 [33 ,34 ,35 ]
$\begin{equation}{\Gamma}({\beta})=1.02+2.45{\beta}^{-0.5}-{\rm i}2.49{\beta}^{-0.5}\end{equation}$ (6)
如图1 (b)所示, 当 x ∈ [ 0 , l 1 ) g ( x ) γ ( x ) β ( x , ω ) γ ( x )
当 x ∈ [ 0 , l 1 ) γ ( x ) = 0 g ( x )
流体速度场和压力场的二维Navier-Stokes方程如下
$\nabla\cdot{\pmb u}(y, {z}, t)=0$ (7a)
$\rho_{f}\frac{\rm D{\pmb u}(y, {z}, t)}{{\rm D}t}=-\nabla p(y, {z}, t)+\mu\nabla ^2{\pmb u}(y, {z}, t)$ (7b)
式中, u ( y , z , t ) p ( y , z , t ) D ( ⋅ ) / Dt ∇
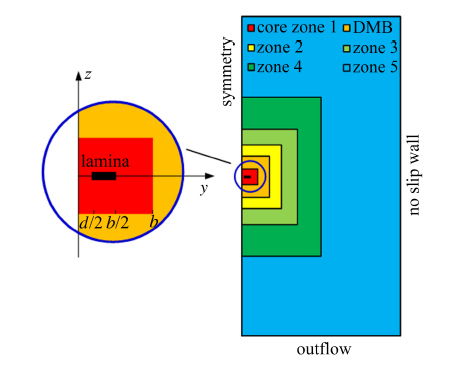
图2 流场划分及边界条件
Fig.2 Representation of the computational domain and boundary conditions
在Fluent中开展流场分析, 流场划分及边界条件如图2 所示.为减弱边缘效应对流场的影响, 整个流场区域的大小为 max { 20 b ( x ) × 20 b ( x ) } b ( x ) β ∈ [ 50,1000 ] γ ∈ [ 0.1,0.7 ] . 间距 g ( x ) w d = 2 mm h = 0.1 mm . 梁在z 方向上的振动规律采用UDF定义为 z ( t ) = A 0 s in ( ω t ) A 0 1 0 - 3 b ( x ) .
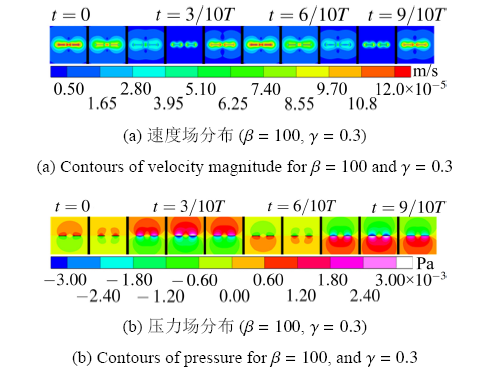
图3 为一个周期内流体速度场和压力场的变化情况.由图3 可知, 速度和压力随时间的变化呈现周期性分布.当 t = 0 1 / 2 T t = 0 t = 5 / 10 T t t + 1 / 2 T
图3 速度场及压力场分布(β = 100 γ = 0.3
Fig.3 Contours of velocity magnitude and pressure for β = 100 γ = 0.3
流体作用在梁上的水动力载荷分布可采用正弦函数拟合[36 ] , 即
F ( t ) = F 0 s in ( ω t + ψ ) (8)
式中, F 0 ψ
$F_0\rm e^{\rm i\psi}=\frac{\rm\pi}{4}\rho_{f}\omega^2b^2{\Theta}(\beta,\gamma)A_0$ (9)
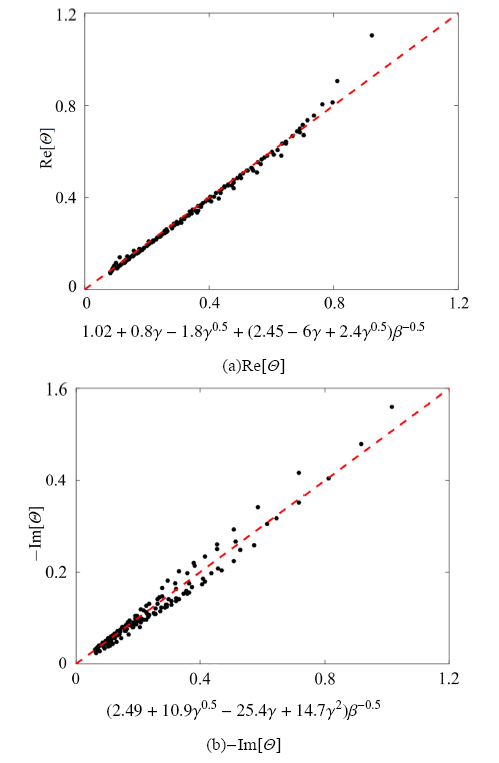
图4 给出了水动力函数实部和虚部随频率参数和截面孔宽比变化的规律. 当截面孔宽比${\gamma}$一定时, $\mathrm{Re}[{\Theta}]$和$-\mathrm{Im}[{\Theta}]$随频率参数${\beta}$的增大而减小, 表明振动频率增大, 结构所受附加质量力和流体阻尼力减小. 而${\beta}$不变时, $\mathrm{Re}[{\Theta}]$和$-\mathrm{Im}[{\Theta}]$随${\gamma}$的增大显著减小, 表明结构所受附加质量力和流体阻尼力会随着截面孔宽比的增大而不断减小, 结构谐振频率与品质因子将明显增大.
图4 水动力函数${\Theta}(\beta, \gamma)$的实部和虚部
Fig.4 Real and imaginary parts of hydrodynamic function ${\Theta}(\beta, \gamma)$
对水动力函数进行最小二乘拟合, 可得${\Theta}({\beta}, {\gamma})$表达式为
${\Theta}(\beta, \gamma)=(1.02+0.8\gamma-1.8\gamma^{0.5})+(2.45-6\gamma+ \\ 2.4\gamma^{0.5})\beta^{-0.5}-{\rm i}(2.49+10.9\gamma^{0.5}-25.4\gamma+ \\ 14.7\gamma^2)\beta^{-0.5}, x\in[0, l_1)$ (10)
水动力函数${\Theta}({\beta}, {\gamma})$的拟合优度如图5 所示, 其实部和虚部的拟合确定系数$R^2$分别为0.990和0.970, 表明式(10)对数值结果的拟合程度较好.
当$x{\in}(l_1, L]$时, ${\gamma}(x)=0$. 此时V型梁截面为矩形, 水动力函数满足
${\Theta}(\beta, \gamma)={\Theta}(\beta, 0)={\Gamma}(\beta), x\in(l_1, L]$ (11)
图5 水动力函数${\Theta}(\beta, \gamma)$的拟合优度
Fig.5 Goodness of fit on hydrodynamic function ${\Theta}(\beta, \gamma)$
2 求解与分析
采用Galerkin方法对方程(5)进行求解, 选取无量纲化的特征函数 { ϕ i ( x ) } i = 1 ∞
ϕ i ( x ) = a i s in λ i x L - s inh λ i x L - s in ( λ i ) + s inh ( λ i ) c os ( λ i ) + c osh ( λ i ) c os λ i x L - c osh λ i x L (12)
且特征函数满足 1 L ∫ 0 L ϕ i ( x ) ϕ j ( x ) dx = δ ij λ i c os λ c osh λ + 1 = 0 i δ ij δ
由特征函数 { ϕ i ( x ) } i = 1 ∞
w ̂ ( x , ω ) = W 0 ( ω ) ∑ j = 1 ∞ q j ( ω ) ϕ j ( x ) (13)
将式(13)代入方程(5), 方程两边同乘 ϕ i ( x ) ( i = 1,2 , … , n )
$\begin{equation} \begin{split} \sum ^\infty _{j=1} q_j&(\omega)\int ^L_0\Bigg\{\dfrac{1+\rm i\eta}{m_s(x)}\dfrac{\partial ^2}{\partial x^2}\left[K(x)\dfrac{\partial ^2\phi _j(x)}{\partial x^2}\right]- \\ \omega ^2[1+M(x){\Theta}(\beta(x, \omega), \gamma(x))]\phi _j(x)\Bigg\}\phi _i(x){\rm d}x= \\ \omega ^2W_0(\omega)\int ^L_0[1+M(x){\Theta}(\beta(x, \omega), \gamma(x))]\phi_i(x){\rm d}x \end{split} \end{equation}$ (14)
取前 m { q i ( ω ) } i = 0 m m
B ( ω ) q ( ω ) = f ( ω ) (15)
式中, B ( ω ) m q ( ω ) = [ q 1 ( ω ) , q 2 ( ω ) , … , q m ( ω ) ] T f ( ω ) m q ( ω )
V型悬臂梁顶端弯曲变形频率响应的传递函数为
G ( ω ) = w ̂ ( L , ω ) W 0 ( ω ) = | G | e i ωφ (16)
式中, | G | φ
图6 给出了 m = 1,2 , … , 8 L = 50 mm l 1 = 33 mm b 0 = 10 mm b t = 1 mm h = 95 μm , E = 3.8 GPa w d = 2 mm ρ s = 1365.8 kg ⋅ m - 3 η = 0.09 .
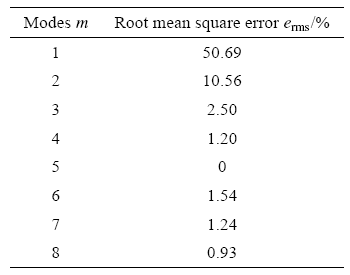
为定量描述模态阶数对求解精度的影响, 以5阶模态阶数下的频响幅值作为基准, 定义频响幅值的均方根误差为
e r ms = 1 N ∑ i = 1 N y i ( m ) - y i ( 5 ) 2 (17)
式中, y i m m N
表1 给出了不同模态阶数下频响幅值的均方根误差.对比发现, m m
图6 不同模态阶数下频率响应对比图
Fig.6 Frequency response of the V-shaped beam for different values of m
3 实验验证
为验证修正后的水动力函数表达式以及V型悬臂梁流固耦合振动模型的准确性, 本文设计了多种不同几何尺寸的V型梁结构, 并在水环境中开展了流固耦合振动实验研究.图7 所示为V型悬臂梁水下振动实验装置图.其中, 高速摄像机用于记录梁在水下的振动情况, 为避免频率混叠, 高速摄像机的采样频率设置为250 Hz.
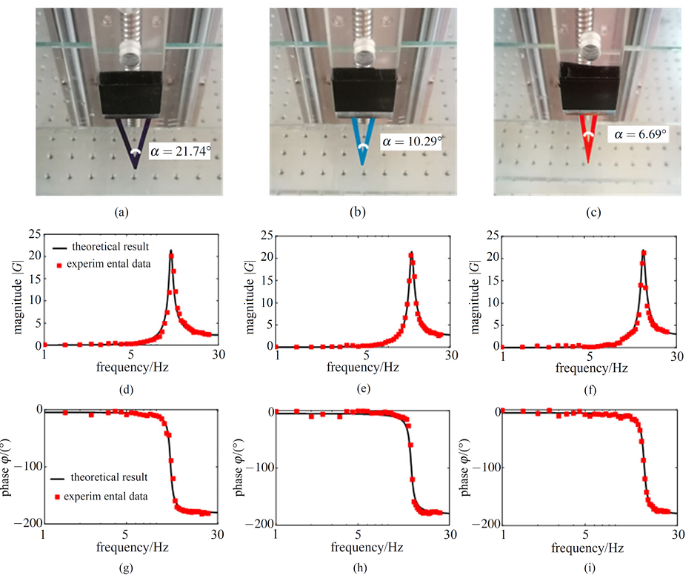
实验测试了空气中V型悬臂梁的频率响应, 得到了3 组不同V型梁结构的弹性模量E及松弛因子 η . 图8 所示为空气中V型悬臂梁理论分析与实验测得的频率响应对比图.图8 (a)、图8 (b)、图8 (c) 为V1, V2, V3梁的实物图, 图8 (d)、图8 (e)、图8 (f)和图8 (g)、图8 (h)、图8 (i)分别为3组梁顶端弯曲变形的频率响应幅值及相位图. 由空气中实验结果可得, 梁结构弹性模量$E={3.8 GPa}$, V1, V2, V3梁的松弛因子$\eta$分别为0.08, 0.09, 0.09. 3组V型梁V1, V2, V3的参数如表2 所示.
图7 实验装置图
Fig.7 Experimental set up
图8 空气中V型梁结构理论分析与实验结果对比图
Fig.8 Frequency response of V-shaped beams’ tip deflection in the in-air experiments
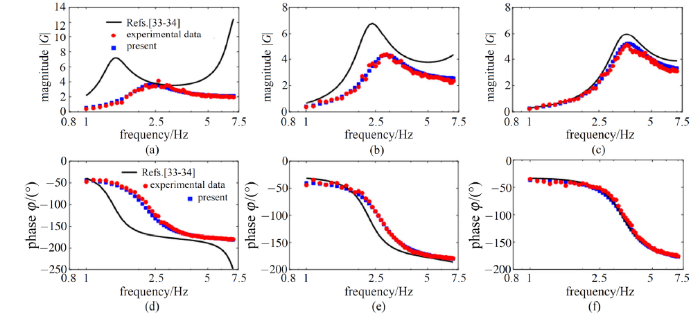
图9 所示为水下V型悬臂梁理论分析与实验测得的频率响应对比图. 图9 (a)、图9 (b)、图9 (c)和图9 (d)、图9 (e)、图9 (f)为V1, V2, V3梁顶端弯曲变形的频率响应幅值及相位图. 由图9 可知, 采用未经修正的水动力函数${\Gamma}(\beta)$求得的频率响应与实验结果差异较大, 理论频响曲线的一阶谐振频率明显偏小, 原因在于, 未经修正的水动力函数实部大于实际值, 求解过程中附加质量力相对实际值偏大, 因此模型求解出的谐振频率降低. 而采用${\Theta}(\beta,\gamma)$所得求解结果与实验数据吻合良好, 说明该水动力函数可以有效地描述V型梁结构的水下振动情况, 从而验证了修正后的水动力函数表达式以及V型悬臂梁流固耦合振动模型. 此外, 如图9 所示, 随着V型梁角度变小, 3组V型梁结构的谐振频率及响应峰值均增大, 说明几何参数对V型梁流固耦合动力学特性的影响显著. 因此, 针对V型悬臂梁流固耦合动力学特性进行参数分析具有重要意义.
图9 水下V型梁结构的理论分析与实验结果对比图
Fig.9 Frequency response of V-shaped beams’ deflection in underwater experiments
4 参数分析与结果
基于V型悬臂梁结构流固耦合振动模型, 本节讨论不同流体黏度、V型梁角度及尺寸变化对流固耦合动力学特性的影响.
由式(4a)可知, 黏性流体环境下, 黏度显著影响振动的频率参数. 以V2梁为例, 计算不同黏度下其顶端弯曲变形的幅频响应, 并给出响应谐振频率及品质因子随黏度变化的关系, 如图10 所示.
随着黏度增大, 频率参数$\beta$明显减小, 水动力函数${\Theta}(\beta, \gamma)$的实部和虚部随之增大, 梁在流体环境下所受附加质量力和流体阻尼力也随之增大, 从而使得V型悬臂梁结构的一阶谐振频率及品质因子明显减小. 同时由图10 可知, 流体阻尼力的增大明显降低了结构的谐振峰值.
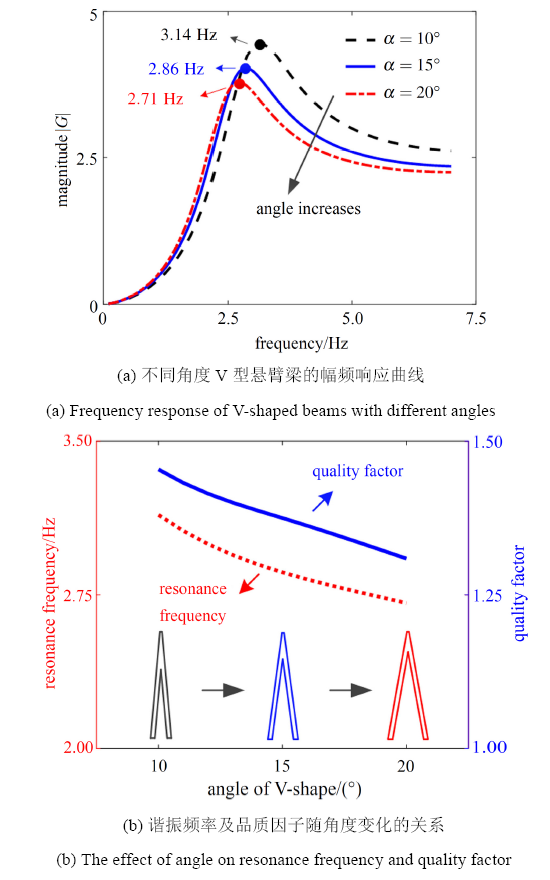
当V型梁长度和腿宽一定时, 角度$\alpha$的变化会引起V型梁宽度和截面孔宽比的明显变化. 固定梁长、腿宽和顶端宽度为$L={50 mm}$, $w_{\rm d}={2 mm}$, $b_{\rm t}={1 mm}$, $h={100 μm}$. 分析不同角度V型梁顶端弯曲变形的幅频响应, 并给出其谐振频率及品质因子随角度$\alpha$变化的关系, 结果如图11 所示.
由图11 可知, 随着角度α增大, V型悬臂梁结构的一阶谐振频率及品质因子均逐渐减小.一方面, 角度$\alpha$增大, 对应V型梁截面孔宽比$\gamma(x)$增大和频率参数$\beta(x, \omega)$增大, 水动力函数${\Theta}(\beta, \gamma)$实部和虚部将减小; 另一方面, 角度$\alpha$增大, V型梁宽度$b(x)$增大, 而V型梁所受水动力载荷正比于$b(x)^2{\Theta}(\beta, \gamma)$, 在${\Theta}(\beta, \gamma)$减小和$b(x)$增大的共同作用下水动力载荷仍呈增大趋势, 附加质量力及流体阻尼力增大, 从而导致谐振频率和品质因子均降低.
图11 V型梁角度对动力学特性的影响
Fig.11 The effect of angle on the vibration characteristics
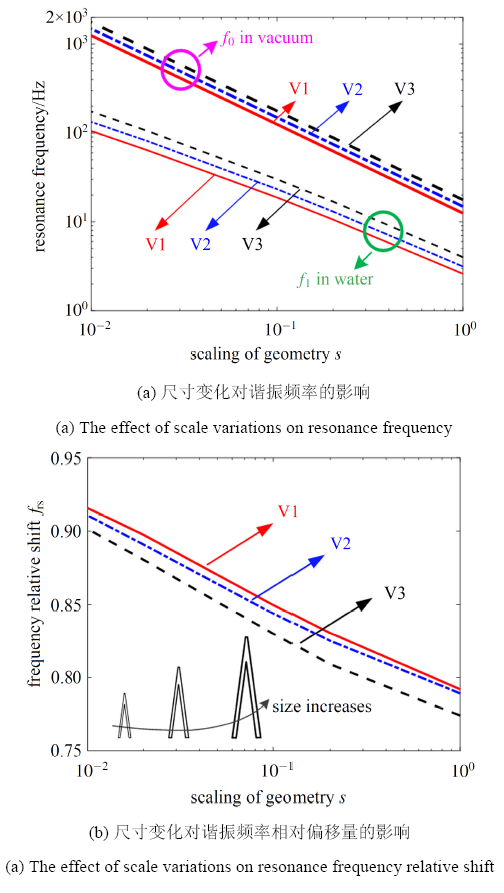
图12 尺寸变化对V型梁动力学特性的影响
Fig.12 The effect of scale variations on the vibration characteristics of V-shaped beams
考虑尺寸变化对V型梁结构动力学特性的影响, 3组V型悬臂梁动力学特性随尺寸变化的关系如图12 所示.定义V型梁结构的尺寸参数为$s$, 其范围为$s\in[10^{-2},10^0]$, 当$s$取为10-2 时, 表示V型梁结构的尺寸整体缩减为原尺寸的1/100. 定义V型梁结构在真空和水中的一阶谐振频率分别为$f_0$和$f_1$, 频率绝对偏移量频率$f_{s}=f_0-f_1$, 相对偏移量$f_{{rs}}=1-f_1/f_0$. V型梁结构的谐振频率和尺寸参数的关系为$\omega\propto s^{-1}$, 因此, 随着尺寸的缩减, 真空和水中的谐振频率均明显增大. 此外, 随着尺寸的不断缩小, 谐振频率的相对偏移量逐渐增大, 表明相对宏观而言, 微观下流体阻尼对谐振频率相对偏移量的影响更加突出.
5 结 论
本文以V型悬臂梁为研究对象, 建立了其在黏性流体环境下的流固耦合动力学模型.引入截面孔宽比参数对矩形梁结构水动力函数进行了修正, 通过流场分析得到了V型悬臂梁结构的水动力函数, 该水动力函数由截面孔宽比和频率参数共同确定.结果表明, 梁结构截面孔宽比及频率参数增大时, V型梁结构所受附加质量力和流体阻尼力均减小.
将修正后的水动力函数代入动力学模型并采用Galerkin方法求解该模型, 得到黏性流体中V型悬臂梁的频率响应特性.同时, 设计了V型悬臂梁结构在水环境下的振动试验装置, 测得不同尺寸V型梁的实验结果与理论模型的分析结果均吻合良好, 从而验证了修正后的水动力函数表达式及V型悬臂梁流固耦合振动模型.
基于V型悬臂梁结构流固耦合振动模型, 分析了不同流体黏度、V型梁角度及尺寸变化对振动特性的影响.结果表明, 流体黏度、V型梁角度增大, 均会导致V型悬臂梁结构流固耦合振动的一阶谐振频率和品质因子的减小.而随着尺寸的缩减, V型梁结构的谐振频率及其相对偏移量明显增大, 说明尺度越小, 流体阻尼对谐振频率相对偏移量的影响越突出.
The authors have declared that no competing interests exist.
参考文献
文献选项
[1]
Stark RW Drobek T Heckl WM Thermomechanical noise of a free v-shaped cantilever for atomic-force microscopy
. Ultramicroscopy , 2001 , 86 (1 ): 207 -215
[本文引用: 1]
[2]
Hu QQ Chen LQ Bifurcation and chaos in atomic force microscope
. Chaos Solitons & Fractals , 2007 , 33 (2 ): 711 -715
[本文引用: 1]
[3]
Chen LQ Lim CW Hu QQ et al .Asymptotic analysis of a vibrating cantilever with a nonlinear boundary
. Science in China , 2009 , 52 (9 ): 1414 -1422
[本文引用: 1]
[4]
徐金明 , 白以龙 .原子力显微镜形貌测量偏差的机理分析及修正方法
.力学学报 , 2011 , 43 (1 ): 112 -21
[本文引用: 1]
(Xu Jinming Bai Yilong Analysis of topography measurement error in atomic force microscope (AFM) and its revision method
. Chinese Journal of Theoretical and Applied Mechanics , 2011 , 43 (1 ): 112 -121 (in Chinese))
[本文引用: 1]
[5]
Sader JE Borgani R Gibson CT et al .A virtual instrument to standardise the calibration of atomic force microscope cantilevers
. Review of Scientific Instruments , 2016 , 87 (9 ): 846 -856
[本文引用: 1]
[6]
魏征 , 孙岩 , 王再冉 等 .轻敲模式下原子力显微镜的能量耗散
.力学学报 , 2017 , 49 (6 ): 1301 -1311
[本文引用: 1]
(Wei Zheng Sun Yan Wang Zairan et al .Energy dissipation in tapping mode atomic force microscopy
. Chinese Journal of Theoretical and Applied Mechanics, 2017 , 49 (6 ): 1301 -1311 (in Chinese))
[本文引用: 1]
[7]
Hosseini R Hamedi M An investigation into resonant frequency of trapezoidal V-shaped cantilever piezoelectric energy harvester
. Microsystem Technologies , 2016 , 22 (5 ): 1127 -1134
[本文引用: 1]
[8]
Litak G Abadal G Rysak A et al .Complex dynamics of a bistable electrically charged microcantilever: Transition from single well to cross well oscillations
. Chaos Solitons & Fractals , 2017 , 99 : 85 -90
[本文引用: 1]
[9]
Lee GB Kuo TY Wu WY A novel micromachined flow sensor using periodic flapping motion of a planar jet impinging on a V-shaped plate
. Experimental Thermal and Fluid Science , 2002 , 26 (5 ): 435 -444
[本文引用: 1]
[10]
Steiner H Keplinger F Schalko J et al .Highly efficient passive thermal micro-actuator
. Journal of Microelectromechanical Systems , 2015 , 24 (6 ): 1981 -1988
[本文引用: 1]
[11]
Wu S Liu X Zhou X et al .Quantification of cell viability and rapid screening anti-cancer drug utilizing nanomechanical fluctuation
. Biosensors & Bioelectronics , 2016 , 77 : 164 -173
[本文引用: 1]
[12]
Enikov ET Kedar SS Lazarov KV Analytical model for analysis and design of V-shaped thermal microactuators
. Journal of Microelectromechanical Systems , 2005 , 14 (4 ): 788 -798
[本文引用: 1]
[13]
Cleveland JP Manne S Bocek D et al .A nondestructive method for determining the spring constant of cantilevers for scanning force microscopy
. Review of Scientific Instruments , 1993 , 64 (2 ): 403 -405
[本文引用: 1]
[14]
Sader JE Larson I Mulvaney P et al .Method for the calibration of atomic force microscope cantilevers
. Review of Scientific Instruments , 1995 , 66 (7 ): 3789 -3798
[本文引用: 1]
[15]
Sader JE Sanelli J A Adamson BD et al .Spring constant calibration of atomic force microscope cantilevers of arbitrary shape
. Review of Scientific Instruments , 2012 , 83 (10 ): 103705
[本文引用: 1]
[16]
Lee HL Chang WJ Yang YC Flexural sensitivity of a V-shaped cantilever of an atomic force microscope
. Materials Chemistry and Physics , 2005 , 92 (2 ): 438 -442
[本文引用: 1]
[17]
Lee HL Chang WJ Sensitivity of V-shaped atomic force microscope cantilevers based on a modified couple stress theory
. Microelectronic Engineering , 2011 , 88 (11 ): 3214 -3218
[本文引用: 1]
[18]
Lee HL Chang WJ Sensitivity analysis of rectangular atomic force microscope cantilevers immersed in liquids based on the modified couple stress theory
. Micron , 2016 , 80 : 1 -5
[本文引用: 1]
[19]
Korayem AH Hoshiar AK Badrlou S et al .A comprehensive model for stiffness coefficients in V-shaped cantilevers
. International Journal of Nanoscience and Nanotechnology , 2016 , 12 (1 ): 27 -36
[本文引用: 1]
[20]
Korayem AH Kianfar A Korayem MH Modeling and simulating of V-shaped piezoelectric micro-cantilevers using MCS theory considering the various surface geometries
. Physica E : Low-dimensional Systems and Nanostructures 2016 , 84 : 268 -279
[本文引用: 1]
[21]
Korayem MH Nahavandi A Analyzing the effect of the forces exerted on cantilever probe tip of atomic force microscope with tapering-shaped geometry and double piezoelectric extended layers in the air and liquid environments
. Journal of Sound & Vibration , 2016 , 386 : 251 -264
[本文引用: 1]
[22]
Berthold T Benstetter G Frammelsberger W et al .Numerical study of hydrodynamic forces for AFM operations in liquid
. Scanning , 2017 , 2017 : 1 -12
[本文引用: 1]
[23]
Dufrêne YF Ando T Garcia R et al .Imaging modes of atomic force microscopy for application in molecular and cell biology
. Nature Nanotechnology , 2017 , 12 (4 ): 295 -307
[本文引用: 1]
[24]
Wu S Liu H Cheng T et al .Highly sensitive nanomechanical assay for the stress transmission of carbon chain
. Sensors & Actuators B Chemical , 2013 , 186 (9 ): 353 -359
[本文引用: 1]
[25]
Wu S Liu H Liang XM et al .Highly sensitive nanomechanical immunosensor using half antibody fragments
. Analytical Chemistry , 2014 , 86 (9 ): 4271 -4277
[本文引用: 1]
[26]
Phan CN Aureli M Porfiri M Finite amplitude vibrations of cantilevers of rectangular cross sections in viscous fluids
. Journal of Fluids and Structures , 2013 , 40 (7 ): 52 -69
[本文引用: 1]
[27]
吴应湘 , 林黎明 , 钟兴福 .带有新型涡激振动抑制罩的圆柱体的水动力特性
.力学学报 , 2016 , 48 (2 ): 307 -317
[本文引用: 1]
(Wu Yingxiang Lin Liming Zhong Xingfu Investigation in hydrodynamics of a circular cylinder with the new suppressing shroud for vortex-induced vibration
. Chinese Journal of Theoretical and Applied Mechanics , 2016 , 48 (2 ): 307 -317 (in Chinese))
[本文引用: 1]
[28]
牛文栋 , 王延辉 , 杨艳鹏 等 .混合驱动水下滑翔机水动力参数辨识
.力学学报 , 2016 , 48 (4 ): 813 -822
[本文引用: 1]
(Niu Wendong Wang Yanhui Yang Yanpeng et al .Hydrodynamic parameter identification of hybrid-driven underwater glider
. Chinese Journal of Theoretical and Applied Mechanics , 2016 , 48 (4 ): 813 -822 (in Chinese))
[本文引用: 1]
[29]
Maali A Hurth C Boisgard R et al .Hydrodynamics of oscillating atomic force microscopy cantilevers in viscous fluids
. Journal of Applied Physics , 2005 , 97 (7 ): 074907
[本文引用: 1]
[30]
白玉川 , 冀自青 , 徐海珏 .摆动河槽水动力稳定性特征分析
.力学学报 , 2017 , 49 (2 ): 274 -288
[本文引用: 1]
(Bai Yuchuan Ji Ziqing Xu Haijue Hydrodynamic instability characteristics of laminar flow in a meandering channel with moving boundary
. Chinese Journal of Theoretical and Applied Mechanics , 2017 , 49 (2 ): 274 -288 (in Chinese))
[本文引用: 1]
[31]
Trivedi C A review on fluid structure interaction in hydraulic turbines: A focus on hydrodynamic damping
. Engineering Failure Analysis , 2017 , 77 : 1 -22
[本文引用: 1]
[32]
Tuck E Calculation of unsteady flows due to small motions of cylinders in a viscous fluid
. Journal of Engineering Mathematics , 1969 , 3 (1 ): 29 -44
[本文引用: 1]
[33]
Sader JE Frequency response of cantilever beams immersed in viscous fluids with applications to the atomic force microscope
. Journal of Applied Physics , 1998 , 84 (1 ): 64 -76
[本文引用: 2]
[34]
Aureli M Porfiri M Low frequency and large amplitude oscillations of cantilevers in viscous fluids
. Applied Physics Letters , 2010 , 96 (16 ): 164102
[本文引用: 2]
[35]
Aureli M Basaran M Porfiri M Nonlinear finite amplitude vibrations of sharp-edged beams in viscous fluids
. Journal of Sound and Vibration , 2012 , 331 (7 ): 1624 -1654
[本文引用: 3]
[36]
Falcucci G Aureli M Ubertini S et al .Transverse harmonic oscillations of laminae in viscous fluids: a lattice Boltzmann study
. Philosophical Transactions of the Royal Society of London A : Mathematical, Physical and Engineering Sciences 2011 , 369 (1945 ): 2456 -2466
[本文引用: 1]
Thermomechanical noise of a free v-shaped cantilever for atomic-force microscopy
1
2001
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
Bifurcation and chaos in atomic force microscope
1
2007
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
Asymptotic analysis of a vibrating cantilever with a nonlinear boundary
1
2009
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
原子力显微镜形貌测量偏差的机理分析及修正方法
1
2011
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
原子力显微镜形貌测量偏差的机理分析及修正方法
1
2011
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
A virtual instrument to standardise the calibration of atomic force microscope cantilevers
1
2016
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
轻敲模式下原子力显微镜的能量耗散
1
2017
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
轻敲模式下原子力显微镜的能量耗散
1
2017
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
An investigation into resonant frequency of trapezoidal V-shaped cantilever piezoelectric energy harvester
1
2016
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
Complex dynamics of a bistable electrically charged microcantilever: Transition from single well to cross well oscillations
1
2017
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
A novel micromachined flow sensor using periodic flapping motion of a planar jet impinging on a V-shaped plate
1
2002
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
Highly efficient passive thermal micro-actuator
1
2015
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
Quantification of cell viability and rapid screening anti-cancer drug utilizing nanomechanical fluctuation
1
2016
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
Analytical model for analysis and design of V-shaped thermal microactuators
1
2005
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
A nondestructive method for determining the spring constant of cantilevers for scanning force microscopy
1
1993
... V型悬臂梁作为一种新颖柔性结构, 在原子力显微镜(AFM)[1 ,2 ,3 ,4 ,5 ,6 ] 、能量采集器[7 ,8 ] 以及微纳机械传感器[9 ,10 ,11 ] 等检测、传感器件或系统中得到广泛应用.V型悬臂梁结构因其在表面接触中不易发生侧扭或旋转[12 ] , 能够显著提升器件或系统性能, 但是其变截面、变刚度[13 ] 等复杂几何特征严重影响结构的动力学性能. ...
Method for the calibration of atomic force microscope cantilevers
1
1995
... 近年来, V型悬臂梁结构设计、性能表征及其力学行为得到广泛关注.Sader等[14 ] 提出了V型悬臂梁刚度系数的校准方法, 并在商用V型梁器件制备中得到成功应用[15 ] .Lee等[16 ,17 ,18 ] 基于经典梁理论和修正后的偶应力理论, 分别分析了矩形梁和V型悬臂梁的灵敏度, 结果表明, 在接触刚度较低时, V型悬臂梁比矩形梁的振动模态灵敏度高.Korayem等[19 ,20 ,21 ] 研究了V型梁结构几何变化对其刚度系数的影响, 并分析了非接触、轻敲两种模式下的V型悬臂梁结构的动力学特性. ...
Spring constant calibration of atomic force microscope cantilevers of arbitrary shape
1
2012
... 近年来, V型悬臂梁结构设计、性能表征及其力学行为得到广泛关注.Sader等[14 ] 提出了V型悬臂梁刚度系数的校准方法, 并在商用V型梁器件制备中得到成功应用[15 ] .Lee等[16 ,17 ,18 ] 基于经典梁理论和修正后的偶应力理论, 分别分析了矩形梁和V型悬臂梁的灵敏度, 结果表明, 在接触刚度较低时, V型悬臂梁比矩形梁的振动模态灵敏度高.Korayem等[19 ,20 ,21 ] 研究了V型梁结构几何变化对其刚度系数的影响, 并分析了非接触、轻敲两种模式下的V型悬臂梁结构的动力学特性. ...
Flexural sensitivity of a V-shaped cantilever of an atomic force microscope
1
2005
... 近年来, V型悬臂梁结构设计、性能表征及其力学行为得到广泛关注.Sader等[14 ] 提出了V型悬臂梁刚度系数的校准方法, 并在商用V型梁器件制备中得到成功应用[15 ] .Lee等[16 ,17 ,18 ] 基于经典梁理论和修正后的偶应力理论, 分别分析了矩形梁和V型悬臂梁的灵敏度, 结果表明, 在接触刚度较低时, V型悬臂梁比矩形梁的振动模态灵敏度高.Korayem等[19 ,20 ,21 ] 研究了V型梁结构几何变化对其刚度系数的影响, 并分析了非接触、轻敲两种模式下的V型悬臂梁结构的动力学特性. ...
Sensitivity of V-shaped atomic force microscope cantilevers based on a modified couple stress theory
1
2011
... 近年来, V型悬臂梁结构设计、性能表征及其力学行为得到广泛关注.Sader等[14 ] 提出了V型悬臂梁刚度系数的校准方法, 并在商用V型梁器件制备中得到成功应用[15 ] .Lee等[16 ,17 ,18 ] 基于经典梁理论和修正后的偶应力理论, 分别分析了矩形梁和V型悬臂梁的灵敏度, 结果表明, 在接触刚度较低时, V型悬臂梁比矩形梁的振动模态灵敏度高.Korayem等[19 ,20 ,21 ] 研究了V型梁结构几何变化对其刚度系数的影响, 并分析了非接触、轻敲两种模式下的V型悬臂梁结构的动力学特性. ...
Sensitivity analysis of rectangular atomic force microscope cantilevers immersed in liquids based on the modified couple stress theory
1
2016
... 近年来, V型悬臂梁结构设计、性能表征及其力学行为得到广泛关注.Sader等[14 ] 提出了V型悬臂梁刚度系数的校准方法, 并在商用V型梁器件制备中得到成功应用[15 ] .Lee等[16 ,17 ,18 ] 基于经典梁理论和修正后的偶应力理论, 分别分析了矩形梁和V型悬臂梁的灵敏度, 结果表明, 在接触刚度较低时, V型悬臂梁比矩形梁的振动模态灵敏度高.Korayem等[19 ,20 ,21 ] 研究了V型梁结构几何变化对其刚度系数的影响, 并分析了非接触、轻敲两种模式下的V型悬臂梁结构的动力学特性. ...
A comprehensive model for stiffness coefficients in V-shaped cantilevers
1
2016
... 近年来, V型悬臂梁结构设计、性能表征及其力学行为得到广泛关注.Sader等[14 ] 提出了V型悬臂梁刚度系数的校准方法, 并在商用V型梁器件制备中得到成功应用[15 ] .Lee等[16 ,17 ,18 ] 基于经典梁理论和修正后的偶应力理论, 分别分析了矩形梁和V型悬臂梁的灵敏度, 结果表明, 在接触刚度较低时, V型悬臂梁比矩形梁的振动模态灵敏度高.Korayem等[19 ,20 ,21 ] 研究了V型梁结构几何变化对其刚度系数的影响, 并分析了非接触、轻敲两种模式下的V型悬臂梁结构的动力学特性. ...
Modeling and simulating of V-shaped piezoelectric micro-cantilevers using MCS theory considering the various surface geometries
1
2016
... 近年来, V型悬臂梁结构设计、性能表征及其力学行为得到广泛关注.Sader等[14 ] 提出了V型悬臂梁刚度系数的校准方法, 并在商用V型梁器件制备中得到成功应用[15 ] .Lee等[16 ,17 ,18 ] 基于经典梁理论和修正后的偶应力理论, 分别分析了矩形梁和V型悬臂梁的灵敏度, 结果表明, 在接触刚度较低时, V型悬臂梁比矩形梁的振动模态灵敏度高.Korayem等[19 ,20 ,21 ] 研究了V型梁结构几何变化对其刚度系数的影响, 并分析了非接触、轻敲两种模式下的V型悬臂梁结构的动力学特性. ...
Analyzing the effect of the forces exerted on cantilever probe tip of atomic force microscope with tapering-shaped geometry and double piezoelectric extended layers in the air and liquid environments
1
2016
... 近年来, V型悬臂梁结构设计、性能表征及其力学行为得到广泛关注.Sader等[14 ] 提出了V型悬臂梁刚度系数的校准方法, 并在商用V型梁器件制备中得到成功应用[15 ] .Lee等[16 ,17 ,18 ] 基于经典梁理论和修正后的偶应力理论, 分别分析了矩形梁和V型悬臂梁的灵敏度, 结果表明, 在接触刚度较低时, V型悬臂梁比矩形梁的振动模态灵敏度高.Korayem等[19 ,20 ,21 ] 研究了V型梁结构几何变化对其刚度系数的影响, 并分析了非接触、轻敲两种模式下的V型悬臂梁结构的动力学特性. ...
Numerical study of hydrodynamic forces for AFM operations in liquid
1
2017
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
Imaging modes of atomic force microscopy for application in molecular and cell biology
1
2017
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
Highly sensitive nanomechanical assay for the stress transmission of carbon chain
1
2013
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
Highly sensitive nanomechanical immunosensor using half antibody fragments
1
2014
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
Finite amplitude vibrations of cantilevers of rectangular cross sections in viscous fluids
1
2013
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
带有新型涡激振动抑制罩的圆柱体的水动力特性
1
2016
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
带有新型涡激振动抑制罩的圆柱体的水动力特性
1
2016
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
混合驱动水下滑翔机水动力参数辨识
1
2016
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
混合驱动水下滑翔机水动力参数辨识
1
2016
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
Hydrodynamics of oscillating atomic force microscopy cantilevers in viscous fluids
1
2005
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
摆动河槽水动力稳定性特征分析
1
2017
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
摆动河槽水动力稳定性特征分析
1
2017
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
A review on fluid structure interaction in hydraulic turbines: A focus on hydrodynamic damping
1
2017
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
Calculation of unsteady flows due to small motions of cylinders in a viscous fluid
1
1969
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
Frequency response of cantilever beams immersed in viscous fluids with applications to the atomic force microscope
2
1998
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
... 在黏性流体环境下, Aureli等引入黏滞层无量纲厚度的仿射相关变量 β - 0.5 [33 ,34 ,35 ] ...
Low frequency and large amplitude oscillations of cantilevers in viscous fluids
2
2010
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
... 在黏性流体环境下, Aureli等引入黏滞层无量纲厚度的仿射相关变量 β - 0.5 [33 ,34 ,35 ] ...
Nonlinear finite amplitude vibrations of sharp-edged beams in viscous fluids
3
2012
... 虽然许多学者研究了真空和空气环境下V型悬臂梁的动力学行为, 但是实际上液体环境中V型梁的应用更普遍[22 ] , 如组织液中细胞表面结构的表征[23 ] , 培养液中蛋白质碳链长度的测定[24 ] , 抗体工作液浓度的检验[25 ] 等.由此, 研究V型悬臂梁在液体环境下的动力学特性, 对于提升相关器件或系统的性能具有重要意义.而研究的关键在于, 分析水动力载荷对流固耦合动力学行为的影响.水动力载荷是由流体惯性、黏度及对流现象相互作用引起的复杂作用力[26 ,27 ,28 ] , 可分解成同相和异相分量, 分别代表附加质量和流体阻尼[29 ,30 ,31 ] .Turk[32 ] 研究了矩形悬臂梁的流固耦合振动, 给出了仅由雷诺数决定的水动力载荷表达式.Sader[33 ] 引入水动力函数对载荷进行了定量描述, 函数的实部和虚部分别表示附加质量和流体阻尼.Aureli等[34 ,35 ] 引入频率参数给出了矩形梁水动力函数表达式, 并针对定截面和变截面矩形梁开展了水下振动实验, 验证了该函数表达式.但相比于矩形梁, V型梁几何结构更为复杂, 其在流体环境下的水动力函数表达式尚未见报道.与同等宽度和厚度的矩形梁截面相比, V型梁截面所受附加质量力和流体阻尼力减小, 采用矩形梁水动力函数描述V型梁所受载荷, 会导致附加质量及流体阻尼产生较大偏差, 因此迫切需要对矩形梁水动力函数进行修正, 以得到V 型悬臂梁结构的水动力函数表达式. ...
... 水动力函数$\Theta $描述了耦合系统中V 型梁所受载荷, 对于求解V型梁流固耦合动力学模型, 分析其动力学特性具有重要意义.Aureli等[35 ] 提出的水动力函数$\gamma $仅适用于矩形梁, 用其分析V型梁所受载荷, 会导致附加质量力及流体阻尼力出现严重的偏差, 因此, 为得到适用于V型梁的水动力函数$\Theta $, 亟需对矩形梁水动力函数$\gamma $进行修正. ...
... 在黏性流体环境下, Aureli等引入黏滞层无量纲厚度的仿射相关变量 β - 0.5 [33 ,34 ,35 ] ...
Transverse harmonic oscillations of laminae in viscous fluids: a lattice Boltzmann study
1
2011
... 流体作用在梁上的水动力载荷分布可采用正弦函数拟合[36 ] , 即 ...
 , 彭志科, 孟光
, 彭志科, 孟光




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
