 2015, Vol. 47
2015, Vol. 47
微重力环境下,液体运动变得复杂,为防止排出夹带气体的液体,对于贮箱内的气液分布研究很有必要. 飞行器上主要使用的推进剂贮箱是板式表面张力贮箱,其推进管理装置主要由导流板、集液海绵体等组成[1]. 它利用液体表面张力通过导流叶片来实现气液分离、液体传输、蓄留定位和排放,满足各种流量需求,并适应于不同的微重力环境,是当前最先进的空间流体管理装置[2]. 目前,这种板式贮箱已经在国外多颗卫星上广泛应用[3].
影响贮箱内气液分布的因素有很多,如重力加速度、接触角等. Tam等[4, 5]研究了贮箱在不同工作状态下的液体分布情况. Debreceni等[6]研究了"V"型叶片的表面张力贮箱在不同工作状态下贮箱内气液分布,液体集中在导流叶片附近,而气体以大气泡的方式集中在贮箱中间. Debreceni等[7]还分析了在滑行状态、微重力和倾斜等状态储液罐内的气液分布情况.Mc Lean等[8]研究了含16个叶片的管理装置,分析了其在不同重力情况下的气液分布效果. 魏延明等[9]进行了一系列微重力落塔实验,研究在不同重力环境下的贮箱内液体的稳定状态,发现在常重力时,液面为平直状态,在微重力情况下时,由于重力相对表面张力比较小,在贮箱的上部形成了一个气团. 李章国等[10]研究了在微重力环境下,圆柱形贮箱内液体的毛细流动过程. 李京浩等[11]研究了在微重力环境下板式表面张力贮箱内推进剂的重定位流动过程. 胡齐等[12]模拟在微重力环境下不同填充比的液面形状,还搭建实验系统进行落塔实验验证[13].此外,李章国等[10]还模拟了零重力条件下不同接触角的气液界面的形貌变化,得到了不同接触角的两相流的相图,发现随着接触角的增大,即液体相对于固壁浸润性的减弱,液体沿固壁向上爬升的能力降低.Concus等[14]数值模拟了在微重力环境下一个单喙模型内不同接触角的液面形貌变化,之后其又数值模拟了非对称的双喙模型内不同接触角的液面形貌变化. 张晨辉等[15]采用不同接触角液体进行落塔实验,发现接触角越小,爬升高度越高.
目前对表面张力贮箱的研究主要考虑重力及接触角对液体分布的影响. 通常采用实验方法对表面张力贮箱进行分析,但其成本昂贵[4, 5, 6, 7, 8, 9]; 而采用简化的贮箱模型进行数值模拟,其结果与实际模型相差较大[10, 11, 12, 13, 14].所以本文采用板式表面张力贮箱模型,考虑不同重力环境和接触角的情况下,对液体的流动过程进行了数值模拟.
1 模型计算 1.1 模型结构基于内角流动原理,本文建立了一种具有内外导流叶片结构的板式贮箱模型. 图1是贮箱的内部结构. 贮箱采用的是球形结构,直径为250 mm. 内外6根导流叶片都固定在贮箱中间的固定杆上,且外侧导流板和贮箱壁面相连.内侧导流板固定杆是贯穿整个贮箱,这样使得结构更结实. 内侧导流板顶部形状由两个平滑曲线组成,底部有一部分和贮箱壁相连. 外侧导流板底部最宽,然后逐渐变窄,顶部的宽度最小,这种设计符合内角流动中液面的形状[11].

|
图1 贮箱的内部结构及$a$和$b$点位置图 Fig.1 The inner structure of tank and the site of point $a$ and $b$ |
根据贮箱结构建立了流域的计算模型,由于计算模型为轴对称结构,则取其结构的1/6进行网格的划分. 采用结构化的网格来划分模型,并对靠近壁面处网格进行了细化. 整个计算模型的网格数约为30万,计算模型如图2所示.

|
图2 计算模型及1/6的贮箱网格模型 Fig.2 Computational model and 1/6 tank mesh model |
本文采用空气和液态水作为气相和液相的模拟工质,水为不可压缩黏性流体,则描述其运动的连续性方程和纳维-斯托克斯方程分别为
\[\nabla \cdot \nu = 0\]
(1)
\[\frac{{\partial \nu }}{{\partial t}} + (\nu \cdot \nabla )\nu = - \frac{1}{\rho }\nabla p + \frac{1}{\rho }\nabla \tau + g + {F_{\rm{S}}}\]
(2)
\[\tau = 2\mu S\]
(3)
\[S = \frac{1}{2}\nabla \nu + {(\nabla \nu )^{\rm{T}}} = 0\]
(4)
\[\theta + a < \frac{\pi }{2}\]
(5)
文献[17]中提到在内角流动过程中,流体流动距离
\[{L_{{\rm{tip}}}} = 1.702\sqrt {GHt} \]
(6)
本文为不对称内角流动. 文献[18]得到,不对称内角流动中,液体流动前缘位置虚拟内角接近45°.
本文采用流体体积函数方法进行仿真计算. 流体体积函数方法利用单元格的流体体积计算自由面的位置和形状,可以很好地处理贮箱内的气液两相流流动及气液界面的变形,进而确定贮箱内的气液分布情况.
将各个壁面均设置为固壁面条件,采用了无穿透,无滑移的边界条件,即
\[{\nu _{\rm{f}}} = {\nu _{\rm{w}}}\]
(7)
采用二阶迎风格式对方程进行离散,速度与压力耦合采用了SIMPLE方法.
1.3 贮箱内流体分布整个贮箱内流体包括水和空气两部分,表面张力系数为0.072 N/m. 在进行计算时,假设液体在初始时处于沉底状态,设置液体的填充量约50%.
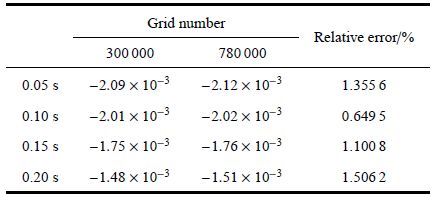
1.4 网格独立性验证本文采用Fluent软件进行三维数值模拟计算,对重力加速度为10$^{ - 4}g_{0}$ 的模型进行网格独立性验证,不同网格量下计算得到点$a$ ($1.48\times10^{-4}$,$-0.105$,0.063 1)在0.05 s$\sim$0.2 s间垂直方向的速度结果,如表1所示[19]. 在其他条件相同的情况下,网格数为780 000与网格数为300 000计算所得到的垂直方向速度的相对误差在2%以内,可知本模拟对网格的依赖性不大,故可以采用网格数为300 000进行数值模拟计算.
| 表1 网格独立性比较 Table 1 Comparison of grid independence |
采用数值模拟的方法,模拟重力加速度为10$^{ -5}g_{0}$时无水乙醇在板式表面张力贮箱内的气液分布情况,并将模拟仿真的结果与微 重力试验结果[13]进行对比. 如图3所示,两者结果非常吻合,故此数值模拟分析方法是可行的.

|
图3 填充比为20%,1.92 s时数值仿真结果与微重力试验结果对比图 Fig.3 Comparison between microgravity experiment result and numerical simulation result with fill ratio 20% at 1.92 s |
液体通常受到表面张力和重力的影响,表面张力和重力的相对影响可以由无量纲数邦德数表示,即,$B_O=\Delta \rho gd^{2} /\sigma$,其中,$\sigma $为表面张力,$d$为特征尺寸,$\Delta \rho $ 为两种流体相的密度差,$g$为重力加速度[20]. 在邦德数较大的情况下,重力对气液形位分布起主导作用,可以忽略表面张力的影响,液面形状趋向于地球上常规的气液界面即水平面的方向发展. 当邦德数远远小于1时,即在微重力环境下,表面张力占主导作用,气液界面与常规重力下有很大的差异,当液体与壁面呈浸润性时,贮箱内液体会沿着壁面爬升,直到势能达到最小.
2.1.1 重力加速度为$10^{ - 4}g_{0}$时液面变化过程模拟接触角$\theta $为10°,重力加速度为10$^{ -4}g_{0}$贮箱内液体的分布情况,提取液体体积分数在0.2$\sim$0.8之间,即为气液自由表面,计算结果如图4所示. 从图4中可以看出,微重力环境下板式贮箱内液体的分布与地面状态下完全不同. 在10$^{- 4}g_{0}$的微重力环境下,$B_O=2.17\times 10^{-7}$,可忽略重力的影响,液体在表面张力的作用下通过板式推进管理装置重新定位.液体沿着外侧导流叶片与壁面的夹角及内侧导流叶片之间的夹角爬升,最终达到了导流叶片结构的顶端;当气液结构稳定后可以发现,内侧导流叶片之间形成了凹形的液面,而在外侧导流叶片夹着壁面之间,液面明显形成了"U"形结构贴在壁面,且发现在内外两侧导流叶片之间所夹液面的位置最低.最终使得液体被有效的固定在板式推进管理装置周围,气体位于贮箱的上方,这样也有效的实现了气液分离.

|
图4 接触角为10°,$g=10^{ - 4}g_{0}$时的气液界面变化 Fig.4 The transformation procedure of the gas-liquid interface under the 10$^{ - 4}g_{0}$ condition with contact angle of 10° |
分析不同重力加速度情况,提取不同时刻下靠近模型外侧导流叶片与壁面的夹角处一点$a$ ($1.48\times10^{-4}$,$-$0.105,0.063 1)的垂直方向速度,结果如图5所示.
图5是重力加速度为$g_{0}/6\sim 10^{ -7}g_{0}$的速度图. 可以看到重力加速度为$g_{0}/6$和$0.1g_{0}$时,液体在重新定位过程中,液面出现波动,开始时刻波动的幅值较大,之后随着时间的衰减而慢慢趋于稳定,这是由于此时邦德数较大,重力对液面的影响仍然较高,所以在重新定位过程中的液面的形状仍趋向于平面.而在其他时刻邦德数逐渐减小的情况下,重力对液面的影响也逐渐减小,液体主要受到表面张力的作用,速度在初始时刻没有出现较大波动,而是呈逐渐减小的趋势,这与图4的液面变化过程也是相符.从图5中发现大约在1.2 s时,液体已爬升至外侧导流叶片的顶端,而此时的速度减小的趋势也变得平缓并趋向于0值.

|
图5 重力加速度为$g_{0}/6\sim 10^{ -7}g_{0}$时点$a$ ($1.48\times 10^{ -4}$, $-0.105$,$0.063 1$)的垂直方向速度图 Fig.5 The vertical velocities at the point $a$ ($1.48\times 10^{ -4}$,$-0.105$, $0.063 1$) under the $g_{0}/6\sim 10^{-7}g_{0}$ conditions |
此外,提取不同时刻下靠近模型内侧导流叶片夹角处一点$b$ ($1.53\times 10^{ -4}$,$-10.8\times 10^{ -3}$,$3.86\times10^{-3}$)的垂直方向的速度与压力,结果如图6所示. 从图6中可以看到,当重力加速度为$g_{0}$时,液面速度始终存在 波动,其压力值在0.04 Pa$\sim$0 Pa波动,这主要是由于表面张力对液面几乎没有影响,只受到重力的作用. 当重力加速 度为$g_{0}/6\sim$10$^{ -2}g_{0}$时,液体在释放初期,液面也存在波动,且重力加速度为$g_{0}/6$,在1.3 s时压力出现阶跃,这是由于此时重力较大,克服了表面张力的作用,导致液体回流,如图7所示. 而当重力加速度小于10$^{ -3}g_{0}$时,各组情况下液面速度的变化趋势几乎一致,速度均呈逐渐减小的趋势,最终趋向于0,这是由于邦德数足够小时,可忽略重力,仅考虑表面张力的作用. 在其压力变化图可以看到,液体在初始情况下压力急剧下降. 大约在0.4 s时速度减小的趋 势变慢,这是由于此时液体已爬升至内侧导流叶片的顶端,液体无法再往上爬升,气液界面逐渐趋于稳定,而此时的压力也接近于0.

|
图6 重力加速度为$g_{0}\sim 10^{ -7}g_{0}$时点$b$ ($1.53\times 10^{ -4}$,$-10.8\times 10^{ -3}$,$3.86\times10^{-3}$)的垂直方向速度与压力图 Fig.6 Vertical velocities and pressure at the point $b$ ($1.53\times 10^{ -4}$,$-10.8\times 10^{ -3}$,$3.86\times10^{-3}$) under the $g_{0}\sim 10^{ -7}g_{0}$ conditions |

|
图7 重力加速度为$g_{0}$/6,1.3 s$\sim$1.5 s的液面变化图 Fig.7 Gas-liquid interface transformations during 1.3 s$\sim$1.5 s under $g_{0}$/6 |
考虑接触角为10°,重力加速度方向沿轴向方向向下,大小分别为$g_{0}$,$g_{0}/6$,10$^{ -1}g_{0}$,10$^{ - 2}g_{0}$,10$^{ - 3}g_{0}$,10$^{ -4}g_{0}$,10$^{ - 5}g_{0}$,10$^{ - 6}g_{0}$和10$^{ -7}g_{0}$共9种工况,得到贮箱内液体的分布情况,结果如图8所示.
从图8中可以看出,在重力加速度为$g_{0}$,$B_O=2.17\times 10^{ - 3}$,整个气液界面为地面上常见的平直情况;在重力加 速度为$g_{0}/6$和0.1$g_{0}$,液面有沿着导流叶片和壁面略微向上爬升的现象.而在重力加速度为10$^{-2}g_{0}$,发现液面变化明显,在导流叶片附近的液体爬升高度明显大于无导流叶片处的液体,在贮箱内部,液体沿着外侧导流叶片与壁面的夹角及内侧导流叶片之间的夹角爬升至导流叶片顶部,但在导流叶片附近的液体破碎成了许多小液滴,这是由于此时重力的影响仍较大,使得液面的结构不够稳定.在重力加速度为10$^{- 3}g_{0}\sim $10$^{ -7}g_{0}$时,重力影响逐渐减小时,整个液面结构越来越稳定,小液滴也几乎不存在了.

|
图8 接触角$\theta $为10°,不同重力加速度对应的1.5 s气液界面 Fig.8 The gas-liquid interface 1.5 s under the different gravitational acceleration conditions with contact angle of 10° |
在液体的重新定位流动过程中,液体沿着外侧导流叶片与贮箱壁面的夹角流动,用$L(t)$表示内角流动过程中液面的高度.从图9(a)可以 看到在重力加速度为$g_{0}$时,液面几乎没有爬升. 在重力加速度为$g_{0}/6\sim0.1g_{0}$时,液面的爬升高度是明显较低,且并不稳定,这同图8的液面图是吻合的. 在重力加速度大于或等于10$^{- 2}g_{0}$时,液体沿着导流叶片爬升至叶片的顶端,且当重力加速度大于10$^{ -3}g_{0}$,液体几乎同时爬升至顶端.

|
图9 液面传输高度随时间的变化关系 Fig.9 Relation of gas-liquid interface high with time |
液体沿着内侧导流叶片之间的内角流动,这相当于沿着直壁面夹角的流动,提取液面的中沿轴线方向的最高点的$x$方向位移值,用$H$表示内侧导流叶片夹角流动过程中液面的爬升高度.图9(b)为$H$随时间$t$的变化.
图9(b)得到同外侧相似的结果,在重力加速度为$g_{0}$时,液面几乎没有爬升; 随着重力加速度的减小,液面的爬升高度逐渐增大,且并不稳定; 当重力加速度大于10$^{- 2}g_{0}$时,其爬升至内侧导流叶片顶部的时间几乎一致.
2.2 不同接触角对液面的影响 2.2.1 不同接触角情况下的液面变化考虑重力加速度为10$^{ - 4}g_{0}$、方向沿轴线方向向下,接触角$\theta $ 分别为0°,15°,30°,45°,60°,75°和90°时贮箱内液体的分布情况,结果如图10所示.图10(b)为外侧导流叶片上液体爬升高度$L(t)$随时间$t$的变化.
图10可以看出,在接触角$\theta $为0°$\sim $30°时,液体均沿着导流叶片爬升至叶片的顶端,液体还沿着壁面和导流叶 片延伸,这是由于在微重力条件下,外侧导流叶片与壁面垂直,其夹角2$\alpha$可近似的看成是90°,满足Concus-Finn条件. 随着接触角$\theta $的增大,液面的铺展呈略微缩小的趋势. 在接触角$\theta $为45°$\sim $90°时,沿着外侧导流叶片的液体并没有达到贮箱顶端,反而形成一个稳定的液面,这是由于此时的接触角$\theta$已不满足Concus-Finn条件,所以当液面爬升至一定高度后,无法继续爬升,但是在接触角$\theta$为45°模型的内侧导流叶片中,液体爬升至顶部,这是因为此时的导流叶片夹角为60°,满足Concus-Finn条件. 接触角$\theta $的逐渐增大,液体爬升的高度逐渐降低.

|
图10 不同接触角的气液界面 Fig.10 The gas-liquid interface with different contact angle |
此外,在文献[21]中提到,在内角流动过程中,液体的流动距离$L$与$\sqrt{t}$成正比,图11(a)是$L(t)$随时间$\sqrt{t}$的 变化,大约在0.63 s$^{1 / 2}$时,液面长度$L(t)$的轨迹总体上是一条直线,接触角为0°$\sim $15°大约在0.95 s$^{1 / 2}$时到达顶端,接触角为30°时,在1.05 s$^{1 /2}$处到达顶端. 提取各条直线$L(t)$的斜率,得到图11(b). 从图11(b)中可得到,随着接触角的增大,直线$L(t)$的斜率减小.

|
图11 外侧内角流动的液面分析 Fig.11 Gas-liquid interface analysis at inner corner flow |
提取内侧导流叶片的轴向位移,得到不同接触角的轴向位移曲线图12(a). 从图12(a)可以看出,当接触角小于45°时,液面能爬升 至内侧导流叶片的顶端,这主要是由于内侧导流叶片的尺寸较小. 而当接触角大于或等于60°时,液面不但没有沿着导流叶片向上爬升,反而沿着导流叶片向下流动,且接触角越大,向下流动越剧烈.这主要是由于内侧导流叶片的夹角为60°,此时的流动条件已经不满足Concus-Finn条件,所以液体向下流动.图12(b)显示了液面的变化过程,可以明显看到,在1.5 s时,整个液面向贮箱底端倾斜.

|
图12 不同接触角时液面的变化 Fig.12 Gas-liquid interface transformations with different contact angle |
改变接触角大小,提取不同时刻下靠近模型外侧导流叶片与壁面的夹角处一点$(1.48\times10^{-4}$,$-0.105$,$0.063 1$)的垂直 方向的速度,结果如图13(a)所示.

|
图13 导流叶片附近的速度与压力变化 Fig.13 The vertical velocities and pressure near the vane |
从图13(a)中可以看到随着时间$t$的增大,该点速度呈逐渐减小的趋势. 接触角$\theta$,初始时刻的初速度越大,当接触 角为90°时,液面速度出现了较大波动,但波动的幅值仍呈逐渐减小的趋势. 图13(b)中可以看到接触角越小,初始压力也越大,但压力均成一个锐减的趋势,之后产生波动,但压力值仍趋向于0.
此外,提取不同时刻下靠近模型内侧导流叶片夹角处一点($1.53\times10^{-4}$,$-10.8\times10^{-3}$,$3.86\times10^{-3}$)的垂 直方向的速度与压力,结果如图13(c)和13(d)所示.从图中可以看到可以内侧导流叶片处速度的变化规律同外侧导流叶片相似,但是在内侧导流叶片夹角处的液体初始速度明显大于外侧的,这是由于内侧的夹角为60°,小于外侧90°夹角,容器内角越小,毛细流动越明显,此结果与文献[4]一致.
3 结 论(1)在接触角等于10°的前提下,重力加速度减小,液面沿着导流叶片爬升,当重力加速度小于10$^{ - 2}g_{0}$,液体沿着外侧导流叶片爬升至贮箱顶部. 在爬升过程中,导流叶片附近的液体的速度呈逐渐减小的趋势,且重力加速度越小,初始速度越大,压力在初始时呈急剧锐减,此后逐渐趋向于0值.
(2)在微重力环境下,液体的接触角对气液界面的影响占主导作用. 当接触角为0°$\sim $30°时,液体能够爬升至外侧导流叶片的顶部,但是,接触角越大,所需的时间越长; 当接触角大于或等于45°时,外侧导流叶片与壁面的夹角近似90°,不满足Concus-Finn条件,液面不能爬升至顶端.
(3)随着接触角的增大,液面高度$L(t)$的斜率K逐渐减小. 在内侧导流叶片附近发现,内角流动过程中,当内角为60°,液体的接触角大于60°时,液体不会沿着内角向上爬升,反而向下凹陷,使得整个液面呈向下凹陷的锥形. 另外,在爬升过程中,接触角越小,初始速度越大,压力也越大,且在初始时呈急剧锐减,此后逐渐趋向于0值.
| [1] | 穆小强, 陈祖奎. 竖管-叶片式表面张力管理装置的设计与分析.火箭推进, 2013, 39(1): 15-18 (Mu Xiaoqiang, Chen Zukui. Design and analysis for standpipe and its vane surface tension management device. Journal of Rocket Propulsion, 2013, 39(1): 15-18 (in Chinese)) |
| [2] | 李永, 潘海林, 魏延明.第二代表面张力贮箱的研究与应用进展.宇航学报, 2007, 28(2): 503-507 (Li Yong, Pan Hailin, Wei Yanming. The evolvement of the study and application on the second generation surface tension tank. Journal of Astronautics, 2007, 28(2): 503-507 (in Chinese)) |
| [3] | Tam W, Ballinger I, Jaekle, Jr. D E. Tank trade studies-an overview. AIAA2008-4940 |
| [4] | Tam W H, Taylor J R. Design and manufacture of a repellant tank assembly. AIAA97-2813 |
| [5] | Tam WH, Drey MD, Larsson LW. Design and manufacture of an oxidizer tank assembly. AIAA2001-3825 |
| [6] | Debreceni MJ, Lay WD, Jaekle, Jr. D E. Design and development of a pmd-type bipropellant tank. AIAA 98-3200 |
| [7] | Debreceni MJ, Uo TK, Jaekle, Jr. D E. Development of a titanium propellant tank. AIAA 2003-4604 |
| [8] | Mclean C, Deininger W, Ingram K, et al. Mission demonstration concept for the long-duration storage and transfer of cryogenic propellants. IEEE Aerospace Conference, 2013. 1-11 |
| [9] | 魏延明, 潘海林.全管理圆柱形表面张力贮箱的微重力实验验证-静平衡与重定位. 控制工程, 1997, (5): 14-19 (Wei Yanming, Pan Hailing. The microgravity experiment of cylindrical surface tension tank - static equilibrium and reorientation. Control Engineering of China, 1997, (5): 14-19 (in Chinese)) |
| [10] | 李章国, 刘秋生, 纪岩等.航天器贮箱气液自由界面追踪数值模拟.空间科学学报, 2008, 28(1): 69-73 (Li Zhangguo, Liu Qiusheng, Ji Yan, et al. Numerical simulation of liquid-vapor interface tracking in tank of spacecraft. Chin J Space Sci , 2008, 28(1): 69-73 (in Chinese)) |
| [11] | 李京浩, 陈小前, 黄奕勇.基于内角流动的板式表面张力贮箱内推进剂流动过程研究.国防科技大学学报, 2012, 34(4): 21-24 (Li Jinghao, Chen Xiaoqian, Huang Yiyong. A study of propellant flow in the vane-type surface tension tank based on interior corner flow. Journal of National University of Defense Technology, 2012, 34(4): 21-24 (in Chinese)) |
| [12] | 胡齐, 李永, 耿永兵等.一种板式推进剂管理装置(Pmd)性能的数值仿真.空间控制技术与应用, 2010, 36(3): 59-62 (Hu Qi, Li Yong, Geng Yongbin, et al. Numerical Simulation for Capability of a Vane PMD to Manage Propellant. Aerospace Control and Application, 2010, 36(3): 59-62 (in Chinese)) |
| [13] | 胡齐, 李永, 潘海林等.微重力环境下大叶片板式贮箱内流体行为的数值仿真与试验验证.空间控制技术与应用, 2013, 39(2): 62-66 (Hu Qi, Li Yong, Pan Hailin, et al. Numerical simulation and experiment verification of fluid behavior in the vane type tank with big vanes in microgravity environment. Aerospace Control and Application, 2013, 39(2): 62-66 (in Chinese)) |
| [14] | Concus P, Finn R, Weislogel M. Measurement of critical contact angle in a microgravity space experiment. Experiments in Fluids, 2000, 28: 197-205 |
| [15] | 张晨辉, 芮伟, 段俐等.基于板式表面张力的落塔实验.第九届全国实验流体力学学术会议论文. 2013: 278-282 (Zhang Chenhui, Rui Wei, Duan Li, et al. Falling tower experiment based on vane surface tension. In: Proc. the Ninth National Academic Conference on Experimental Fluid Mechanics. 2013: 278-282 (in Chinese)) |
| [16] | Concus P, Finn R. On capillary free surfaces in a gravitational field. Acta Mathematica, 194, 132(1): 207-233 |
| [17] | 李京浩, 陈小前, 黄奕勇等.微重力环境下的不对称内角流动研究.中国科学: 技术科学, 2012, 42(8): 957-962 (Li Jinghao, Chen Xiaoqian, Huang Yiyong, et al. Study on asymmetric interior corner flow in microgravity condition. Sci China Tech Sci, 2012, 42(8): 957-962 (in Chinese)) |
| [18] | 刘玲, 李永强, 段俐等. 微重力下圆柱形不对称内角的毛细流动研究. 中国力学大会. 2013. |
| [19] | 刘赵淼, 刘丽昆, 申峰. Y型微通道两相流内部流动特性.力学学报, 2014, 46(2): 209-216 (Liu Zhaomiao, Liu Likun, Shen Feng. Two-phase flow characteristics in Y-junction microchannel. Chinese Journal of Theoretical and Applied Mechanics , 2014, 46(2): 209-216 (in Chinese)) |
| [20] | 刘赵淼,刘佳,申峰. 不同重力下90o弯管内气液两相流流型及流动特性研究.力学学报, 2015, 47(2): 223-230 (Liu Zhaomiao, Liu Jia, Shen Feng. Simulation on flow patterns and characteristics of two-phase gas-liquid flow in a 90 bend under different gravity. Chinese Journal of Theoretical and Applied Mechanics, 2015, 47(2): 223-230 (in Chinese)) |
| [21] | 庄保堂, 李永, 潘海林等.微重力环境下导流叶片流体传输速度的试验研究.空间控制技术与应用. 2012, 38(6): 1-5 (Zhuang Baotang, Li Yong, Pan Hailin, et al. Experiment investigation on transportation velocity of the fluid on propellant acquisition vanes under microgravity environment. Aerospace Control and Application, 2012, 38(6): 1-5 (in Chinese)) |